1
Изобретение относится к экстремальным системам автоматического управления, выходной сигнал объекта управления которых зависит от двух входных сигналов и имеет характеристику типа «овраг.
Известен способ поиска экстремума функции двух переменных типа «овраг, заключающийся в изменении входных сигналов по гармоническому закону со сдвигом фаз 90°, запоминании экстремального значения выходного сигнала в процессе поиска и увеличении амплитуды входных сигналов при значениях выходного сигнала, меньших запомненного.
Целью изобретения является повышение скорости поиска при значениях выходного сигнала, больших запомненного.
Для этого уменьшают амплитуды входных сигналов до фиксированной величины, затем увеличивают их по линейному закону.
Для повышения точности поиска по истечении интервала времени, превышаюшего период, уменьшают амплитуды входных сигналов по линейному закону до нулевого значения.
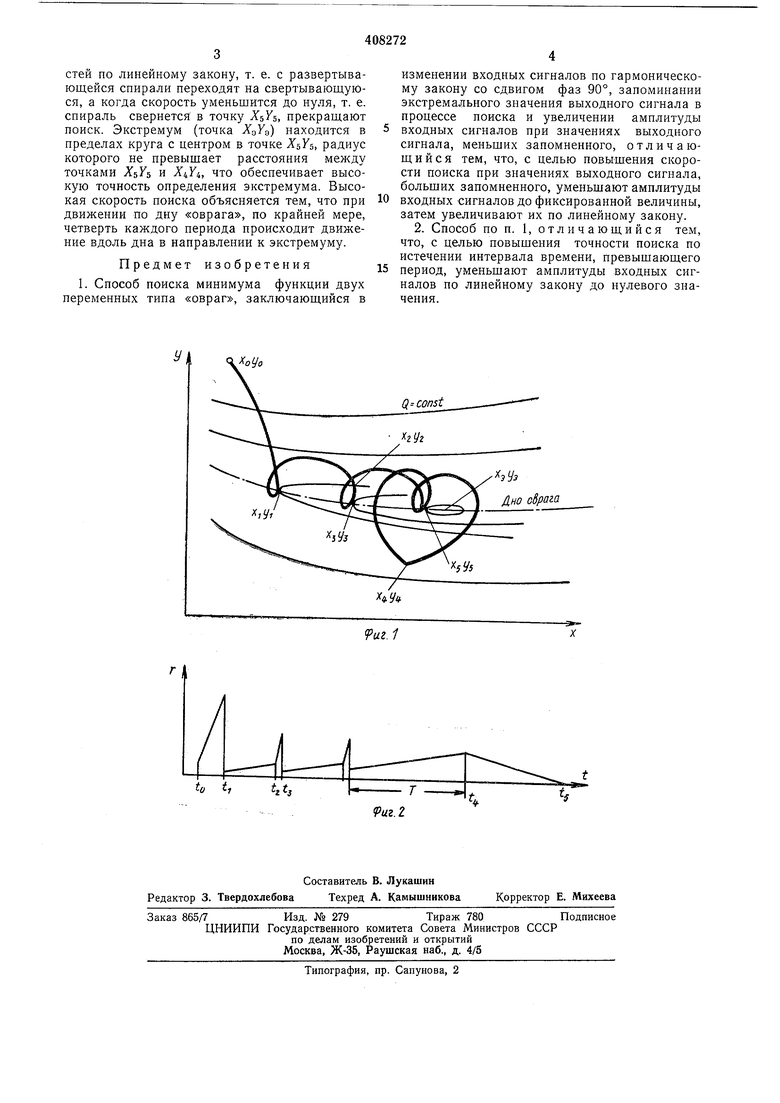
На фиг. 1 изображены проекции эквипотенциалей функции качества Q (Х, У) типа «овраг ; на фиг. 2 - изменение амплитуды t скоростей во времени для траектории поиска.
На фиг. 1 по осям координат отложены значения входных сигналов X и Y объекта управления, а также приведена траектория поиска из начальной точки ХоУо. Функция имеет минимум в точке , т. е. линии равного уровня, на которых Q const. Моменты времени
to, ti ... на фиг. 2 соответствуют точкам XoYo, XiYi... на фиг. 1.
Поиск начинается в точке движением по спиралевидной траектории. При этом значение выходного сигнала объекта Q (X, У)
меньше запомненного (рабочее движение). Амплитуду скоростей X и У увеличивают, и запоминают текущее значение Q (X, У). Пусть, например, в точке AlFi выходной сигнал становится больше запомненного значения Q.
При этом мгновенно уменьшают амплитуду скоростей до некоторого фиксированного, относительно малого значения, а затем увеличивают ее по линейному закону (пробное движение). При этом запомненное в точке XiFi
значение Q не изменяется и остается все время меньше текущего значения вплоть до точки В точке вновь переходят на рабочее движение, а в точке ХзУз - на пробное и т. д. Если пробное движение длится более,
чем период Т (за это время спиралевидная траектория делает один виток в 360°), и выходной сигнал объекта все время больше запомненного, экстремум находится в пределах этого витка траектории. В этом случае в точке
начинают уменьшать амплитуду скоро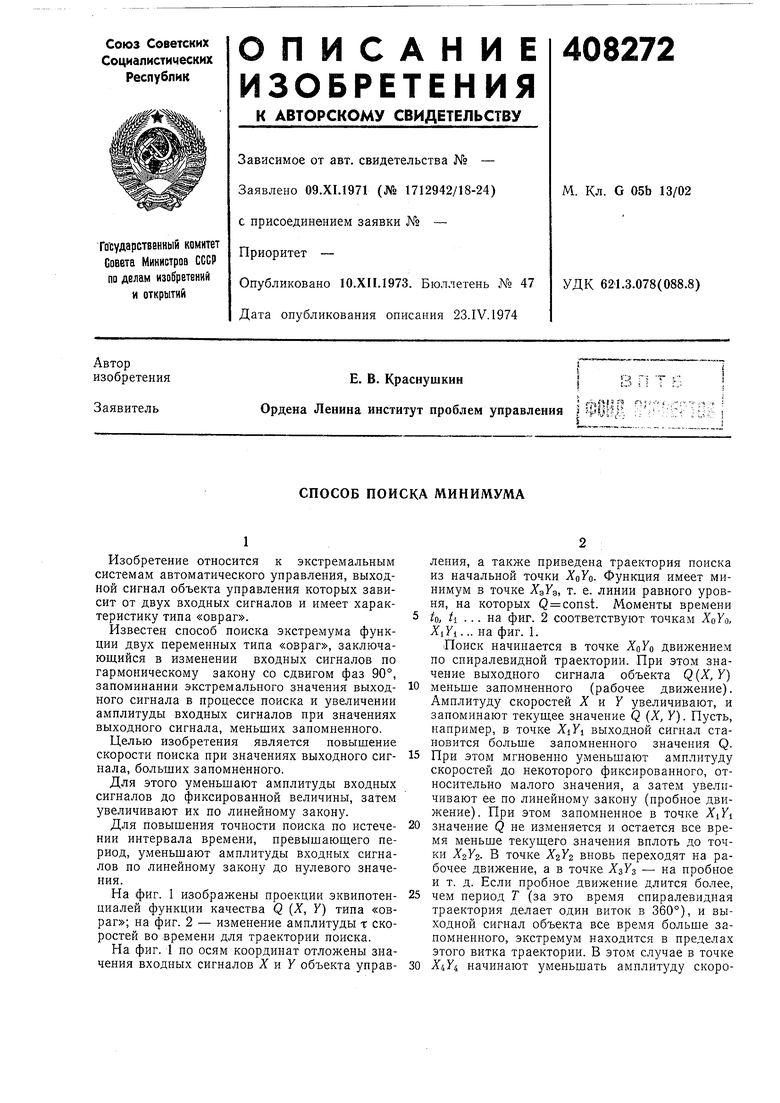
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕПРЕРЫВНОГО ПОИСКА ЭКСТРЕМУМА | 1972 |
|
SU345470A1 |
| Двухканальный экстремальный регулятор | 1987 |
|
SU1444713A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Способ поиска экстремума | 1978 |
|
SU744447A1 |
| Устройство для поиска экстремума | 1983 |
|
SU1091119A1 |
| Экстремальная система управления | 1984 |
|
SU1241191A1 |
| Способ автоматической оптимизации инерционных управляемых объектов | 1973 |
|
SU492853A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| СПОСОБ ДИСКРЕТНОГО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1991 |
|
RU2015522C1 |
| СПОСОБ ПОИСКА ЭКСТРЕМУМА СТАТИСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИНЕРЦИОННОГО ОБЪЕКТА | 2011 |
|
RU2471220C1 |
