Механизм 20 поворота стрелы 12, установленный на поворотной платформе 7, снабжен шестерней 21, взаимодействующей с зубчатым сектором 17.
Поворот платформы 7 осуществляется посредством шестерни 22, насаженной на выходном валу редуктора 23, установленного на платформе 7 и приводимого от электродвигателя 24.
Таким образом, платформа 7 и стрелы 12 и 13 имеют независимые приводы поворота.
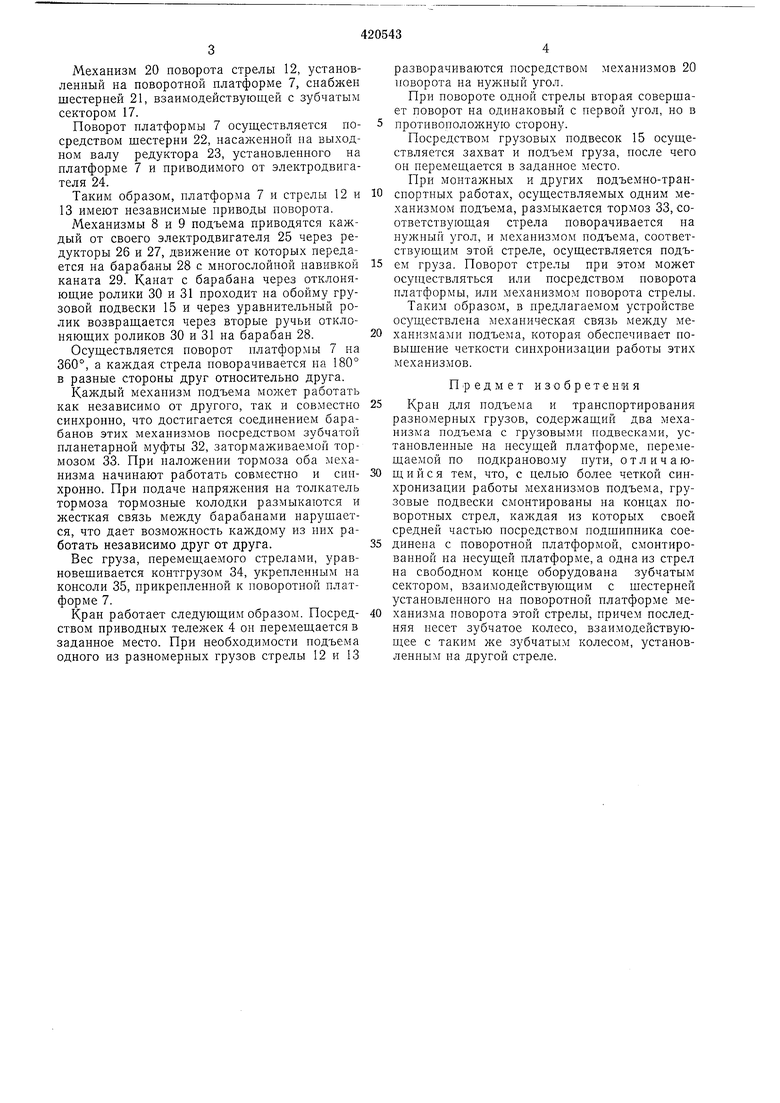
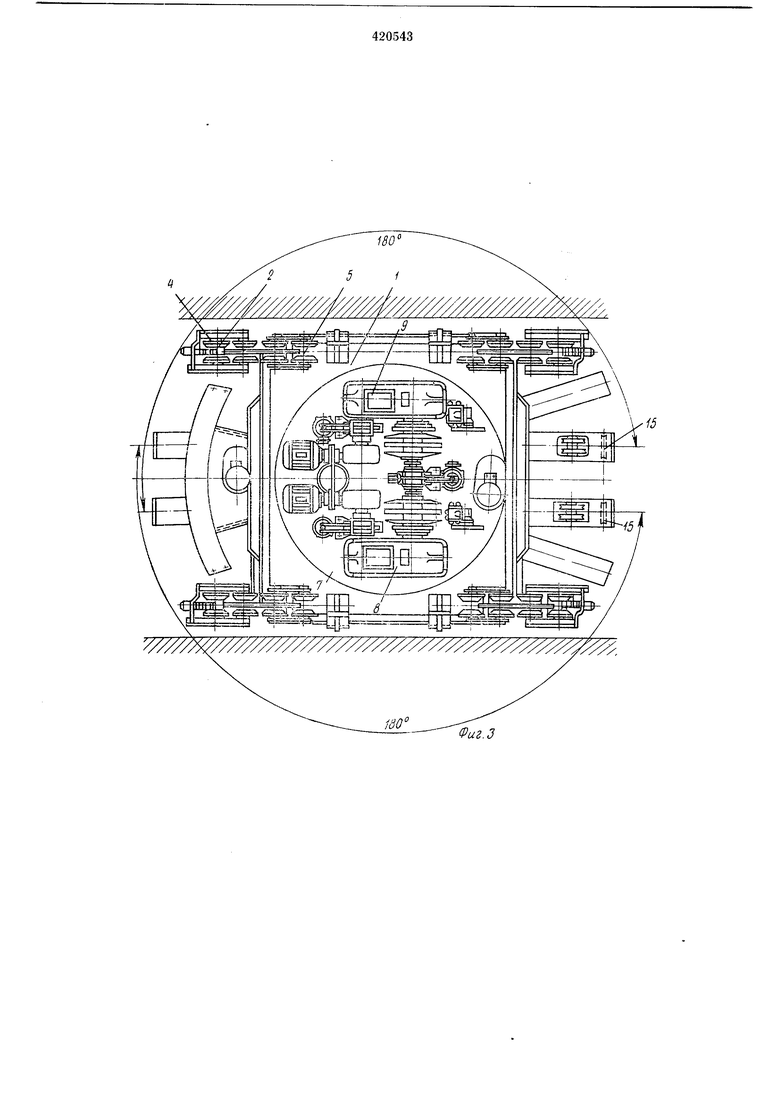
Механизмы 8 и 9 подъема приводятся каждый от своего электродвигателя 25 через редукторы 26 и 27, движение от которых передается на барабаны 28 с многослойной навивкой каната 29. Канат с барабана через отклоняющие ролики 30 и 31 проходит на обойму грузовой подвески 15 и через уравнительный ролик возвращается через вторые ручьи отклоняющих роликов 30 и 31 на барабан 28.
Осуществляется поворот платформы 7 на 360°, а каждая стрела поворачивается па 180° в разные стороны друг относительно друга.
Каждый мехапизм подъема может работать как независимо от другого, так и совместно синхронно, что достигается соединением барабанов этих механизмов посредством зубчатой планетарной муфты 32, затормаживаемой тормозом 33. При наложении тормоза оба механизма начинают работать совместно и синхронно. При подаче напряжения на толкатель тормоза тормозные колодки размыкаются и жесткая связь между барабанами нарушается, что дает возможность каждому из них работать независимо друг от друга.
Вес груза, перемещаемого стрелами, уравновешивается контгрузом 34, укрепленным на консоли 35, прикрепленной к поворотной платформе 7.
Кран работает следующим образом. Посредством приводных тележек 4 он перемещается в заданное место. При необходимости подъема одного из разномерных грузов стрелы 12 и 13
разворачиваются посредством механизмов 20 поворота на нужный угол.
При повороте одной стрелы вторая совершает поворот на одинаковый с первой угол, но в протнвоположную сторону.
Посредством грузовых подвесок 15 осуществляется захват и подъем груза, после чего он перемещается в заданное место.
При монтажных и других подъемно-транспортных работах, осуществляемых одним механизмом подъема, размыкается тормоз 33, соответствующая стрела поворачивается на нужный угол, и механизмом подъема, соответствующим этой стреле, осуществляется подъем груза. Поворот стрелы при этом может осуществляться или посредством поворота платформы, или механизмом поворота стрелы.
Таким образом, в предлагаемом устройстве осуществлена механическая связь между механизмами подъема, которая обеспечивает повышение четкости синхронизации работы этих механизмов.
Предмет изобретения
Крап для подъема и транспортирования разномерных грузов, содержащий два механизма подъема с грузовыми подвесками, установленные на несущей платформе, перемещаемой по подкрановому пути, отличающийся тем, что, с целью более четкое синхронизации работы механизмов подъема, грузовые подвески смонтированы на концах поворотных стрел, каждая из которых своей средней частью посредством подшиппика соединена с поворотной платформой, смонтированной па несущей платформе, а одна из стрел на свободном конце оборудована зубчатым сектором, взаимодействующим с шестерней установленного на поворотной платформе мехапизма поворота этой стрелы, причем последняя несет зубчатое колесо, взаимодействующее с таким же зубчатым колесом, установленным па другой стреле.
Фиг 2
Фиг.З
21
i7
е
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Кран для подъема и транспортирования разномерных грузов | 1975 |
|
SU525614A1 |
| Механизм поворота грузоподъемного органа мостового крана | 1983 |
|
SU1131820A1 |
| Кран | 1988 |
|
SU1576478A1 |
| Подъемный стреловой кран | 1959 |
|
SU125657A1 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ОБЕСПЕЧЕНИЯ ЕГО РАБОТЫ | 2008 |
|
RU2467946C2 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2014 |
|
RU2567472C1 |



п
27
