Изобретение относится к области подъемно-транспортного машиностроения, а именно к кранам для подъема и транспортирования разномерных грузов.
Известен механизм поворота грузоподъемного органа мостового крана, содержащий приводной винт с гайкой, установленные на платформе, несущей грузовые блоки грузоподъемного органа 1.
Известное устройство конструктивно сложно, так как необходимо выполнять стрелы переменного сечения и криволинейной конфигурации, узлы вращения и поворота стрел, а также опорные роликовые узлы сложны в изготовлении.
Цель изобретения - повышение надеж ности механизма поворота грузоподъемного органа мостового крана.
Поставленная цель достигается тем, что механизм поворота грузоподъемного органа мостового крана, содержащий приводной винт с гайкой, установленные на платформе, несущей грузовые блоки грузоподъемного органа, снабжен дополнительной гайкой, установленной на винте, который выполнен с правой и левой нарезками и установлен перпендикулярно продольной оси поворотной платформы, криволинейной направляющей с размещенными в ней кронщтейнами, закрепленной на поворотной платформе, причем криволинейная направляющая расположена вдоль винта и симметрично относительно него, а кронщтейны связаны соответственно с основной и дополнительной гайками и на них закреплены грузоподъемные органы и грузовые блоки.
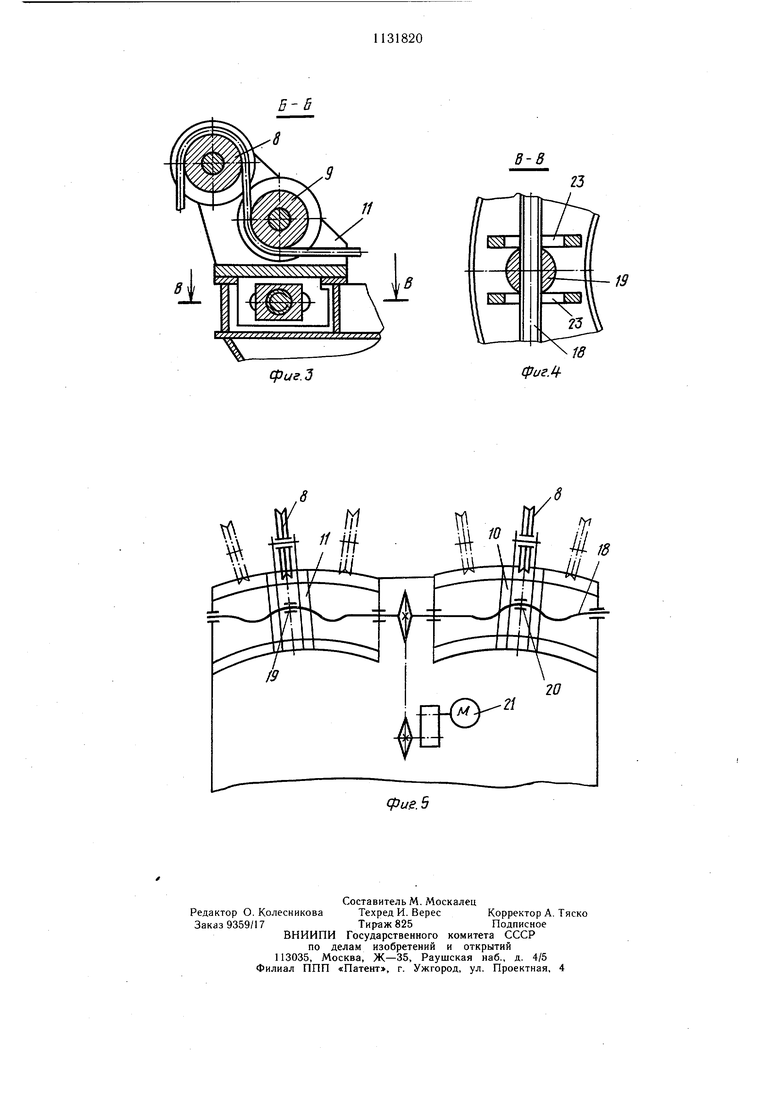
На фиг. 1 схематически изображен кран, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - кинематическая схема перемещения грузовых блоков.
Кран для подъема и транспортирования разномерных грузов содержит несущую раму 1, перемещающуюся по подвесному пути с помощью приводных ходовых тележек 2, и несущую посредством роликовой опоры 3 поворотную платформу 4. На последней установлены приводные механизмы 5 и 6 грузоподъемных органов 7, каждый из которых выполнен в виде крюковой подвески на канате, огибающем грузовые блоки 8 и 9, смонтированные на корпусах 10 и 11, и отклоняющие блоки 12 и 13, размещенные на платформе 4. Корпуса 10 и 11 перемещаются по криволинейным направляющим 14-17 соответственно, также установленным на платформе 4. Выполнение направляющих криволинейными обеспечивает линейное и угловое перемещение корпусов относительно продольной оси платформы. Перемещение корпусов осуществляется вращением винта 18 с правой и левой нарезками, расположенного перпендикулярно продольной оси платформы 4, и перемещением по нему основной гайки 19 и дополнительной 20, которые щарнирно соединены с корпусами 10 и 11. Винт 18 получает вращение от привода 21, а платформа 4 -
0 от механизма 22. В нижней части корпусов 10 и 11 грузовых блоков 8 и 9 предус.мотрены овальные пазы 23 для обеспечения перемещения указанных корпусов по криволинейньш направляющим 14-17.
Кран работает следующим образом. С помощью приводных тележек 2 кран перемещается в заданное место. Для подъема одного из разномерных грузов платформа 4 с помощью механизма 22 поворота поворачивается на опоре 3 так, чтобы грузоподъемные органы 7 находились над грузом. Затем винт 18 получает вращение от привода 21 и гайки 19 и 20, перемещаясь по винту, воздействуют на корпуса 10 и 11. Последние, перемещаясь в криволинейных направляющих 14-17, сходятся или расхо5 дятся для обеспечения необходимого расстояния между крюковыми подвесками. После установки нужного расстояния начинают работать приводные механизмы 5 и 6 грузоподъемных органов 7 и осуществля0 ется подъем груза.
Использование предлагае.мого крана позволит ориентировочно получить экономию в размере 56 тыс. руб.
В-8
сриг.З
(ригЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран для подъема и транспортирования разномерных грузов | 1975 |
|
SU525614A1 |
| Грузоподъемное устройство | 1989 |
|
SU1724562A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Устройство для подъема и перемещения рельсовых транспортных средств | 1989 |
|
SU1761570A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Траверса | 1990 |
|
SU1766822A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Кран-манипулятор | 1983 |
|
SU1150214A1 |
| ГИДРАВЛИЧЕСКИЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 1966 |
|
SU216202A1 |
МЕХАНИЗМ ПОВОРОТА ГРУЗОПОДЪЕМНОГО ОРГАНА МОСТОВОГО КРАНА, содержащий приводной винт с гайкой, установленные на платформе, несущей X,/ | грузовые блоки грузоподъемного органа, отличающийся тем, что, с целью повышения надежности, он снабжен дополнительной гайкой, установленной на винте, который выполнен с правой и левой нарезками и установлен перпендикулярно продольной оси поворотной платформы, криволинейной направляющей с размещенными в ней кронштейнами, закрепленной на поворотной платформе, причем криволинейная направляющая расположена вдоль винта и симметрично относительно него, а кронштейны связаны соответственно с основной и дополнительной гайками и на них закреплены грузоподъемные органы и грузовые блоки. 31.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кран для подъема и транспортирования разномерных грузов | 1975 |
|
SU525614A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
