1
Изобретение относится к области автоматизации управления путевыми машинами, используемыми при ремонте верхнего строения пути.
Известны системы управления рабочими органами путевых машин, например шпалоподбивочных, содержащих смонтированный на ходовой части машины в непосредственной близости от верхнего строения пути управляющей орган, выполненный в виде магнитного детектора, и вторичные приборы, электрически связанные с магнит1ным детектором и устройством торможения путевой машины.
Однако такие системы управления не обеспечивают автоматической установки рабочих органов путевой машины в определенное положение и управления движением путевой машины.
Цель изобретения - повышение точности установки рабочих органов путевой машины над местом верхнего строения пути, подлежащим обработке.
Это достигается тем, что система управления снабжена импульсным датчиком, электрически связанным с управляющим органом через вторичные приборы, и индикатором, электрически связанным с устройством торможения и рабочими органами путевой машины. Кроме того, индикатор может быть снабжен цифровым табло, состоящим из шкалы, фиксирующей путь, пройденный машиной от момента выдачи сигнала управляющим органом до начала торможения маш,ины и шкалы, фиксирующей путь, пройденный машиной от момента выдачи сигнала управляющим органом до начала работы рабочих органов. Целесообразно индикатор снабжать сумматором и регулирующим устройством, а импульсный датчик - измерительным колесом.
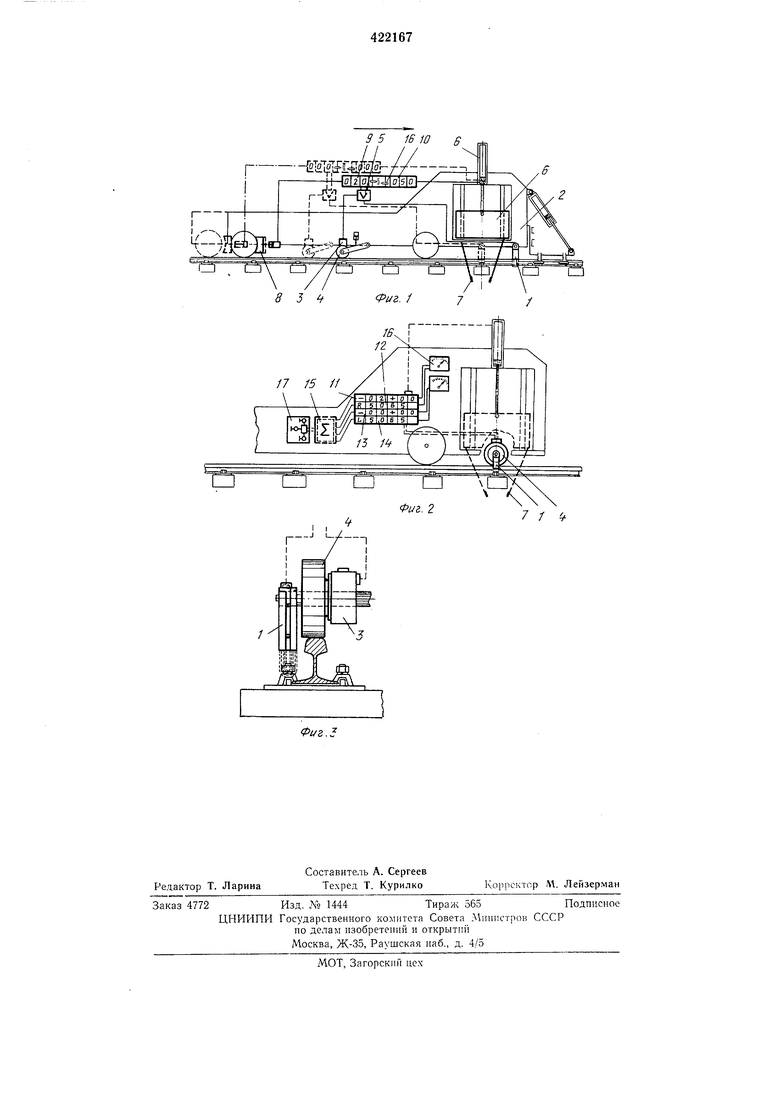
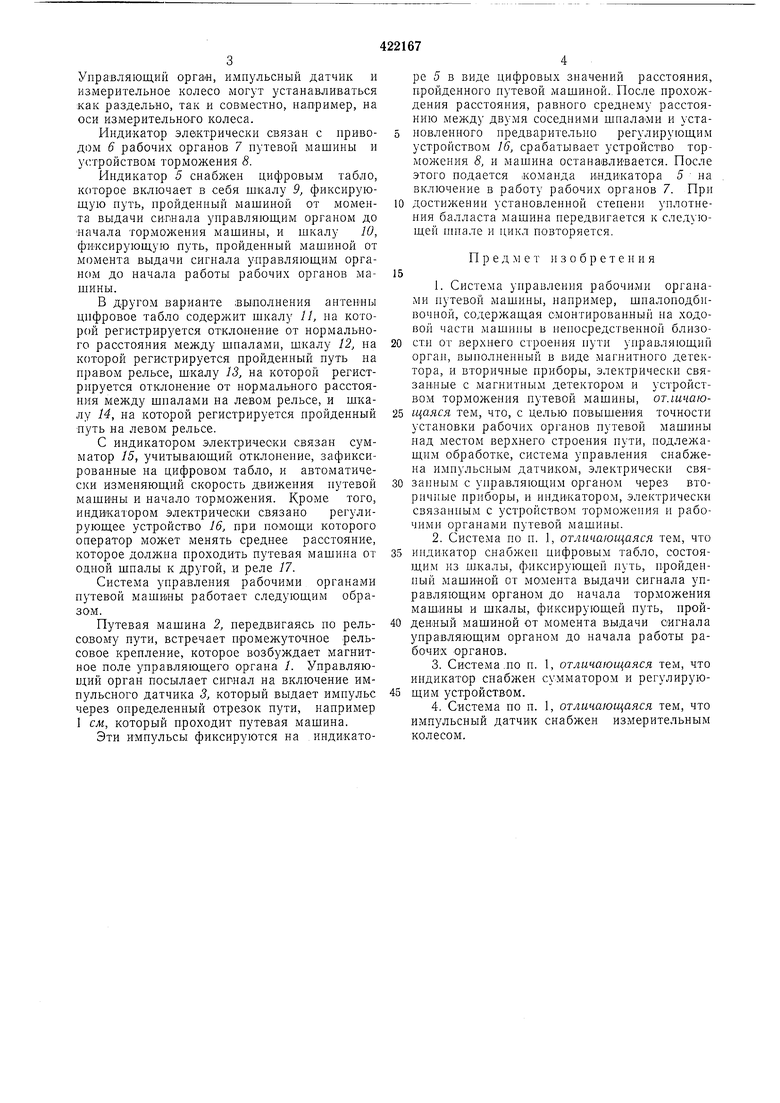
На фиг. 1 схематически изображена система управления рабочими органами шпалоподбивочной машины; на фиг. 2 - вариант размещения на ходовой части путевой машины управляющего органа, импульсного датчика и измерительного колеса; на фиг. 3 - то же, вид сбоку.
Система управления рабочими органами путевой машины содержит управляющий орган /, который смонтирован на ходовой части путевой машины 2 в непосредственной близости от верхнего строения пути. Управляющий орган выполнен в виде магнитного детектора, магнитное поле которого возбуждается при приближении его к металлическим предметам, например к элементам промежуточного рельсового крепления.
С управляющим органом электрически связаны импульсный датчик 3, контактирующий с измерительным колесом 4, и индикатор 5.
Управляющий орган, импульсный датчик и измерительное колесо могут устанавливаться как раздельно, так и совместно, например, на оси измерительного колеса.
Индикатор электрически связан с приводом 6 рабочих органов 7 путевой машины и ус.тройством торможения 8.
Индикатор 5 снабжен цифровым табло, которое включает в себя шкалу 9, фиксирующую путь, пройденный машиной от момента выдачи сигнала управляющим органом до начала торможения машины, и шкалу 10, фиксирующую путь, пройденный машиной от момента выдачи сигнала управляющим органом до начала работы рабочих органов машины.
В другом варианте ;вьшолнения антениы цифровое табло содержит шкалу //, на которой регистрируется отклонение от нормального расстояния между шпалами, шкалу 12, на которой регистрируется пройденный путь на п)авом рельсе, шкалу 13, на которой регистрируется отклонение от нормального расстояния между шпалами на левом рельсе, и шкалу 14, на которой регистрируется пройденный путь на левом рельсе.
С индикатором электрически связан сумматор 15, учитывающий отклонение, зафиксированные на цифровом табло, и автоматически изменяющий скорость движения путевой мащины и начало торможения. Кроме того, индикатором электрически связано регулирующее устройство 16, при помощи которого оператор может менять среднее расстояние, которое должна проходить путевая машина от одной шпалы к другой, и реле 17.
Система управления рабочими органами путевой машины работает следующим образом.
Путевая машина 2, передвигаясь по рельсовому пути, встречает промежуточное рельсовое крепление, которое возбуждает магнитное поле управляющего органа /. Управляюи ий орган посылает сигнал на включение импульсного датчика 3, который выдает импульс через определенный отрезок пути, например 1 см, который проходит путевая машина.
Эти импульсы фиксируются на индикаторе 5 в виде цифровых значений расстояния, пройденного путевой машиной.. Иосле прохождения расстояния, равного среднему расстоянию между двумя соседними шпала ми и установленного предварительно регулирующим устройством 16, срабатывает устройство торможения 8, и машина останавливается. После этого подается команда индикатора 5 на включение в работу рабочих органов 7. При
достижении установленной степени уплотнения балласта машина передвигается к следующей шпале и цикл повторяется.
Предмет }i з о б р е т е н и я
1.Система уиравления рабочими органами путевой машины, например, шпалоподбивочной, содержащая смонтированный на ходовой части машипы в пепосредственной близости от верхнего строения пути управляющий орган, выполненный в виде магнитного детектора, и вторичные приборы, электрически связанные с магнитным детектором и устройством торможения путевой машипы, отличающаяся тем, что, с целью повышения точности установки рабочих органов путевой машины над местом верхнего строения пути, подлежащим обработке, система управления снабжена импульсным датчиком, электрически связапным с управляющим органом через вторичные приборы, п индикатором, электрически связанным с устройством торможения и рабочими органами путевой машины.
2.Система по п. 1, отличающаяся тем, что индикатор снабжен цифровым табло, состоящим из шкалы, ф-иксирующей , пройденный машиной от момента выдачи сигнала управляющим органом до начала торможения машнпы и шкалы, фиксирующей путь, пройденный машиной от момента выдачи сигнала управляющим органом до начала работы рабочих органов.
3.Система .по п. 1, отличающаяся тем, что индикатор снабжен сумматором и регулирующим устройством.
4.Система по п. 1, отличающаяся тем, что импульсный датчик снабжен измерительным колесом.
I
35 1В10
Фиг. 2
7 /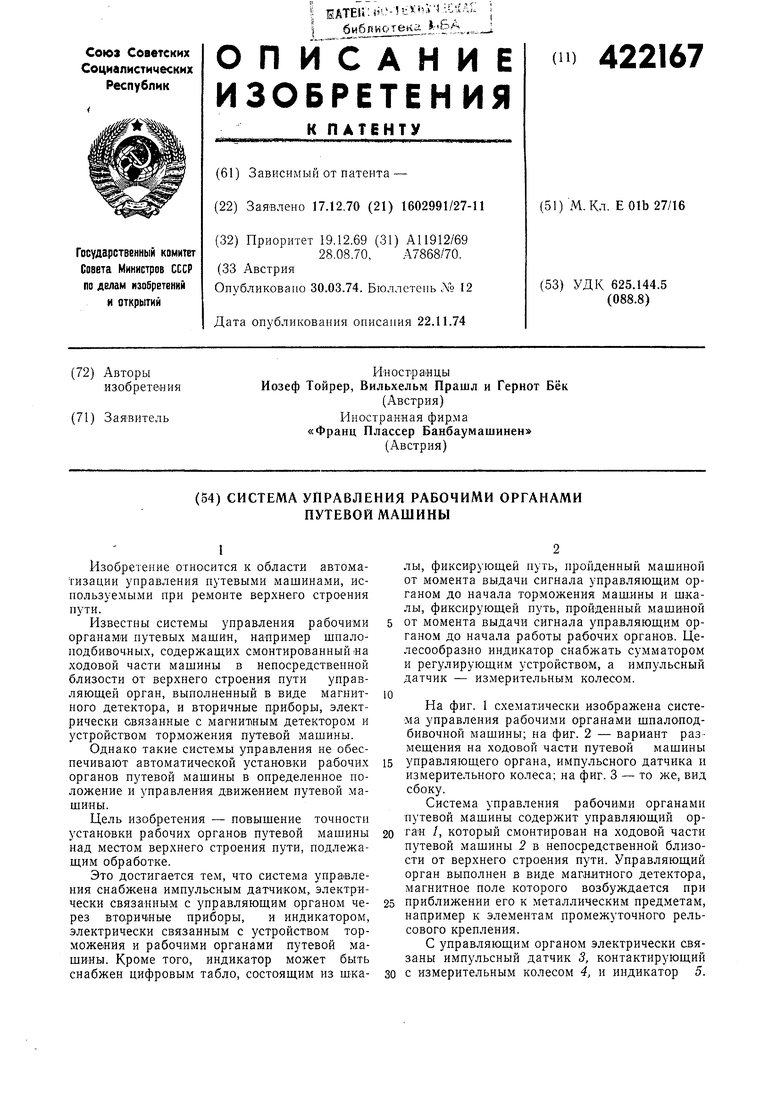
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления путевой машиной | 1981 |
|
SU998627A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ПУТЕВОЙ МАШИНЫ | 1998 |
|
RU2144966C1 |
| УПРАВЛЯЕМАЯ ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2011 |
|
RU2554205C2 |
| ПУТЕВАЯ ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 1993 |
|
RU2111308C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ШПАЛОПОДБИВОЧНЫХ МАШИН | 2018 |
|
RU2704764C1 |
| Устройство для остановки путевой машины | 1979 |
|
SU787539A1 |
| ПУТЕВАЯ ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 1992 |
|
RU2057830C1 |
| Устройство для подбивки шпал и выправки пути для путевой машины со смонтированной на ходовых тележках рамой | 1983 |
|
SU1279537A3 |
| МАШИНА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ШПАЛ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2228988C2 |
| Передвижная выправочно-подбивочная машина | 1983 |
|
SU1259963A3 |