1
Изобретение относится к железнодорожному транспорту и может быть применено для автоматизации управления путевыми машинами, используемыми при строительстве и ремонте верхнего строения пути.
.Известно устройство для остановки путевой машины, содержащее установленные на ней-датчики обнаружения крепления шпал к рельсу и пройденного пути от шпалы до включения тормоза,соединенные со счетчиками пройденного пути от шпалы до включения тормоза и тормозного пути,блок задания программы указанных величин пути 1.
Недостаток известного устройства состоит в том, что оно не обеспечивает автоматической и точной настройки машины на оптимальную точку включения тормозной.систекЫ.
Известно также устройство для остановки путевой машины, содержащее установленные на ней датчики обнаружения крепления шпал и пройденного пути, подключенные к блоку ввода информации, выход которого соединен с блоком определения тормозного пути, блоком фиксации остановки, индикатором точности остановки и одним входом блока управления режимами работы машины, к другим входам которого подключены блок определения тормозного пути, индикатор точности остановки, блок фиксации остановки и блок сравнения, соединенный со счетчиком тормозного пути, входом подключенного к одному из выходов блока управления, другие выходы которого соединены с тормозной системой 2.
Недостаток этого устройства - недостаточная точность настройки путевой машины на оптимальную точку включения тормозной системы.
Целью изобретения является повышение точности остановки машины над участком верхнего строения пути, подлежащим обработке.
Поставленная цель достигается тем, что устройство снабжено соединенными с блоком ввода информации блоком эпюры шпал, блоком определения центра шпал, блоком определения расстояния между шпалами, блоком смещения и блоком определения перекоса шпал, при этом блок эпюры шпал соединен с индикатором точности остановки, блоком определения тормозного пути, блоком сравнения и блоками определения центра шпал, регистрации расстояния между шпалами, смешения и перекоса шпал.
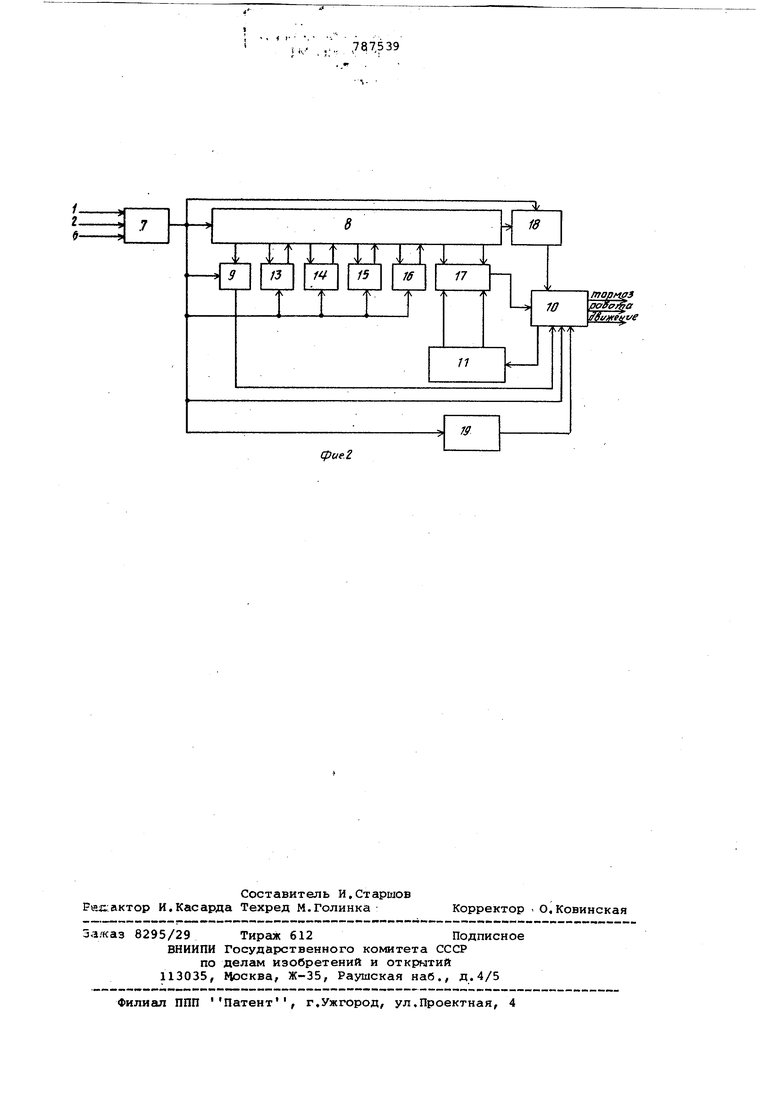
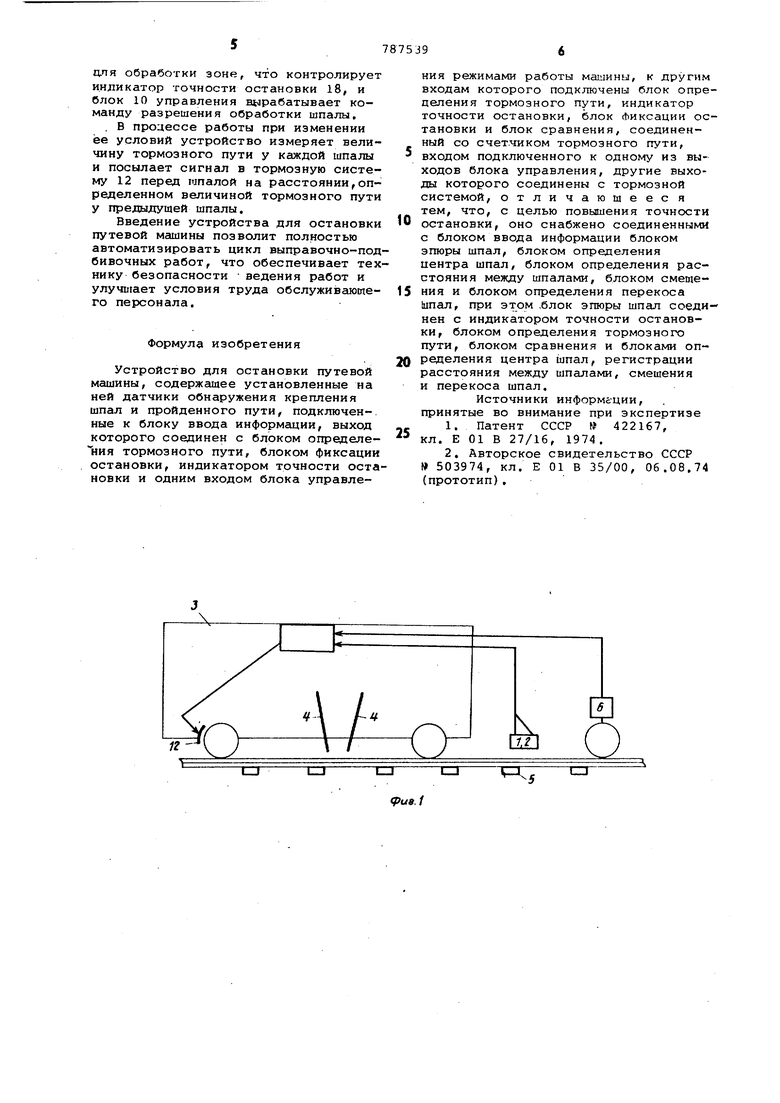
На фиг.1 показана схема расположения элементов устройства на мшиине на фиг.2 блок-схема устройства для остановки путёвой машины.
Датчики 1, 2 обнаружения шпал закреплены на путевой машине 3 на определенном расстоянии впереди рабочих органов 4 над обоими концами шпал в непосредственной близости от элементов крепления рельсов к шпале 5. Они представляют собой индуктивный датчик, реагирующий на внесение в поле катушки индуктивности элементов крепления рельсов к шпале. Датчик пройденного пути 6 также закреплен на раме машины, место его расположения произвольно.
Датчики 1, 2 обнаружения шпал и датчик пройденного пути б подключены к входам блока ввода информации 7, который имеет элементы запоминания и формирования команд с них.
Выходы блока 7 ввода информации соединены с входами блока 8 эпюры шпал, выполненно.го на основе сдвигового регистра, который имеет столько разрядов, на сколько сантиметров вынесены датчики 1, 2 обнаоужения шпал 5 перед рабочими органами 4 машины 3. К блоку 8 эпюры шпал подключен блок 9 определения величины тормозного пути, связанный через блок 10 управления режимами работ машины со счетчиком 11 тормозного пути, рыход блока 10 управления связан с тормозной системой 12.
К блоку 8 эпюры шпал присоединены блок 13 определения центра шпал, бло 14 определения расстояния между шпалами, блок 15 смещения, блок 16 определения перекоса шпал. Входы блока 17 сравнения подключены к блоку 8 эпюры шпал и к счетчику 11 тормозного пути, а выход блока 17 связан с входом блока 10 управления. Входы всех блоков, кроме блока 17, соединены с выходом блока 7 ввода информации. Индикатор 18 точности остановки, представляющий из себя сдвиго вый регистр, подключен к выходу блока 8 эпюры шпал и ко входу блока 10 управления,к другому входу которого подключен блок 19 фиксации остановки машины.
Устройство работает-следующим образом.
При движении путевой машины 3 с датчиков 1, 2 обнаружения шпал поступают электрические импульсы в блок ввода информации 7, Там эти сигналы .запоминаются, формируются и записываются в начальный разряд регистра сдвига блока 8 эпюры шпал. Каждый импульс от датчика б пройденного пути сдвигает эти сигналы в регистре сдвига блока 8 на один разряд в сторону нулевого разряда индикатора 18.
Таким образом, в блоке 8 эпюры шпал записываются величины перекосов и расстояния между шпалами в промежутке между датчиками 1, 2 обнаружения шпал и центром рабочих органов 4
Как только сигналы в регистре сдвга блока 8 достигнут определенного разряда, в блоке 9 предварительно определяется величина тормозного пути и формируется импульс для точной остановки над первой шпалой {блок 9 в дальнейшем сигналов не вырабатывает) Этот импульс поступает на вход блок 10 управления, который выдает сигнал Тормоз в тормозную систему 12 и разрешающую команду на прохождение сигналов с блока 7 ввода информации от датчика 6 пройденного пути на вход счетчика 11 тормозного пути, от считываю г1его расстояние, пройденное машиной от подачи сигнала на торможение -до полной остановки. Полный останов фиксирует блок 19 Фиксации останова машины, выход которого соединен со входом блока 10 управления.
Так как сигналы в регистре сдвига блока 8 еще не дошли до индикатора 18, блок 10 управления выдает команду на дальнейшее движение машины.
Блок 13 определения центра шпал позволяет машине ориентировать рабочие органы над геометрическим центро перекошенных шпал. Блок 14 определения минимально допустимого расстояния между шпалами позволяет машине проезжать над сдвоенными (строенными и т.д.) шпалами без остановки,
В случае, если расстояние между шпалами мало и не позволяет производить обработку ьтал с ориентацией рабочих органов машины над геометрическим центром шпал, блок 15 смещения определяет возможность смещения и позволяет осуществлять остановку машины со смещением относительно центра шпал.
Блок 16 определения перекоса шпал позволит машине проезжать без остановки над шпалой, если ее перекос больше допустимого .для обработки
При приближении к обрабатываемой шпале на величину тормозного пути, зафиксированного в счетчике 11 тормозного пути, в блоке сравнения 17 вырабатывается сигнал, поступающий на вход блока 10 управлени Блок 10 выдает сигнал Тормоз в тормозную систему 12 и сигнал на сброс счетчика 11 тормозного путив нулевое положение.
Далее в блоке 10 управления формируется разрешающая команда ла прохождение сигналов с блока 7 от датчика б пройденного пути на вход счетчика 11 тормозного пути для счета величины тормозного пути до момента остановки.
В момент фиксации ос-аноики блоком 19 шпала находится в допустимой
Ц.ПЯ обработки зоне, что контролирует индикатор точности остановки 18, и блок 10 управления вырабатывает команду разрешения обработки шпалы,
В процессе работы при изменении ее условий устройство измеряет величину тормозного пути у каждой шпалы и посылает сигнал в тормозную систему 12 перед гапалой на расстоянии,определенном величиной тормозного пути у предыдущей шпалы.
Введение устройства для остановки путевой машины позволит полностью автоматизировать цикл выправочно-подбивочных работ, что обеспечивает технику безопасности ведения работ и улучшает условия труда обслуживаюиего персонала.
Формула изобретения
Устройство для остановки путевой машины, содержащее установленные на ней датчики обнаружения крепления шпал и пройденного пути, подключен-, ные к блоку ввода информации, выход которого соединен с блоком определе ния тормозного пути, блоком фиксации остановки, индикатором точности остановки и одним входом блока управления режимами работы машины, к другим входам которого подключены блок определения тормозного пути, индикатор точности остановки, блок Фиксации остановки и блок сравнения, соединенный со счет.чиком тормозного пути, входом подключенного к одному из выходов блока управления, другие выходы которого соединены с тормозной системой, отличаюшеес я тем, что, с целью повышения точности
0 остановки, оно снабжено соединенны 1Я с блоком ввода информации блоком эпюры шпал, блоком определения центра шпал, блоком определения расстояния между шпалами, блоком смеще5ния и блоком определения перекоса 1ипал, при этом .блок эпюры шпал соединен с индикатором точности остановки, блоком определения тормозного пути, блоком сравнения и блоками определения центра шпал, регистрации
0 расстояния между шпалами, смещения и перекоса шпал.
Источники информации, принятые во внимание при экспертизе
1.Патент СССР № 422167,
5 кл. Е 01 В 27/16, 1974.
2,Авторское свидетельство СССР
503974, кл. Е 01 В 35/00, 06.08.74 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ПУТЕВОЙ МАШИНЫ | 1998 |
|
RU2144966C1 |
| Устройство для останова путевой машины | 1974 |
|
SU503974A1 |
| Способ определения положения центров шпал рельсового пути | 2023 |
|
RU2821619C1 |
| Устройство для определения положения шпал рельсового пути | 2024 |
|
RU2834718C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ДЛЯ ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2013 |
|
RU2538498C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| Устройство для приема на локомотиве информации с пути | 1990 |
|
SU1776597A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |
| УСТРОЙСТВО ФИКСАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНОЙ ПАРЫ И ПУТЕВОЙ ДАТЧИК ФИКСАЦИИ КОЛЕСНОЙ ПАРЫ | 2000 |
|
RU2160202C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |