Изобретение относится к способам управления движением и может быть использовано в системах автоматизированного диспетчерского управления подвижными единицами, движущимися по магистрали с расположенными на ней контрольными пунктами.
Целью изобретения является повышение точности способа при регулировании движения подвижных единиц (ПЕ), движущихся с произвольными интервалами.
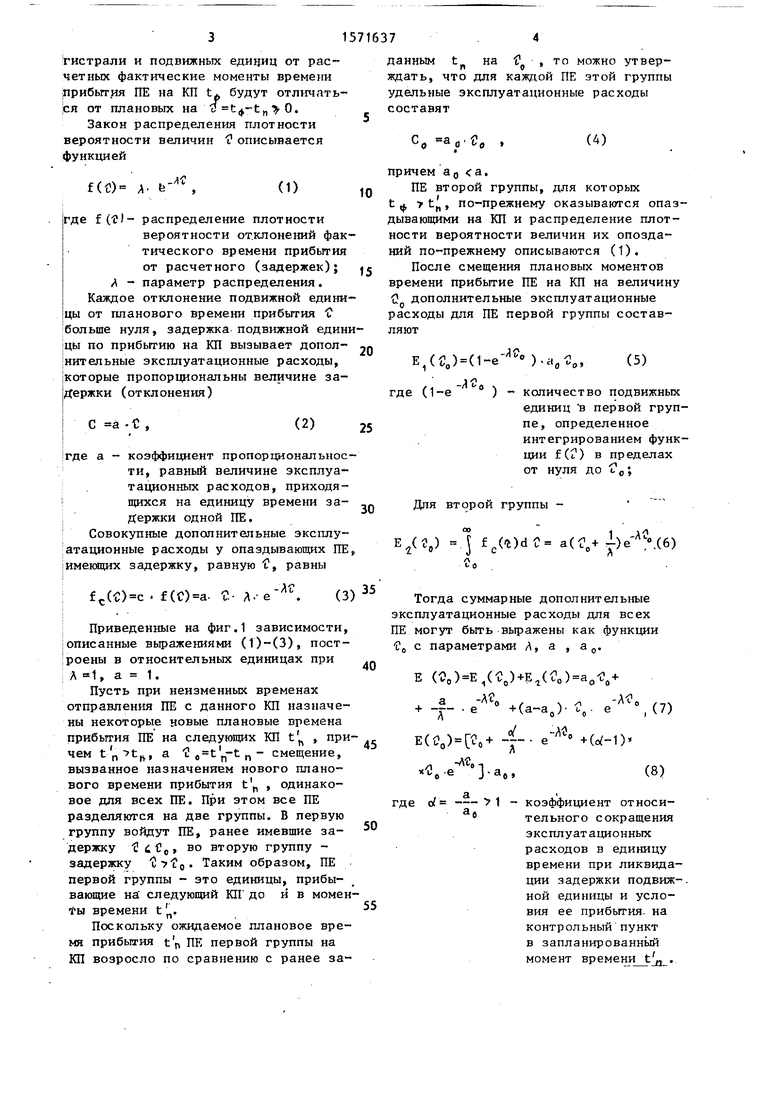
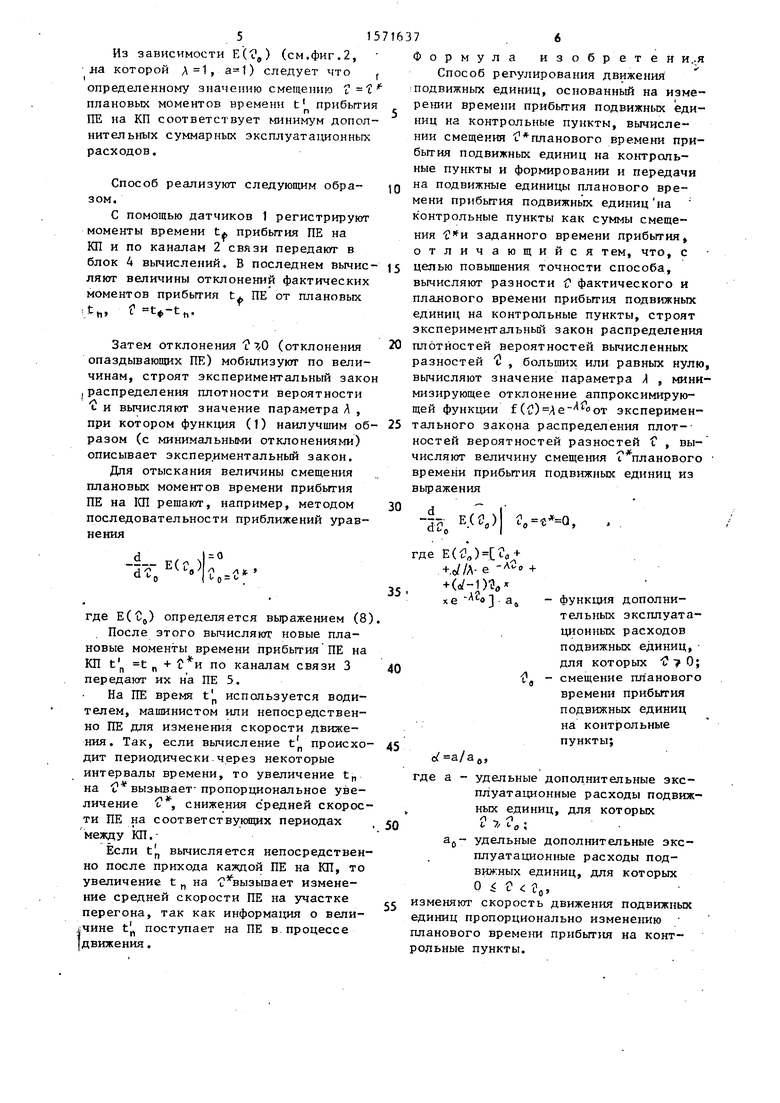
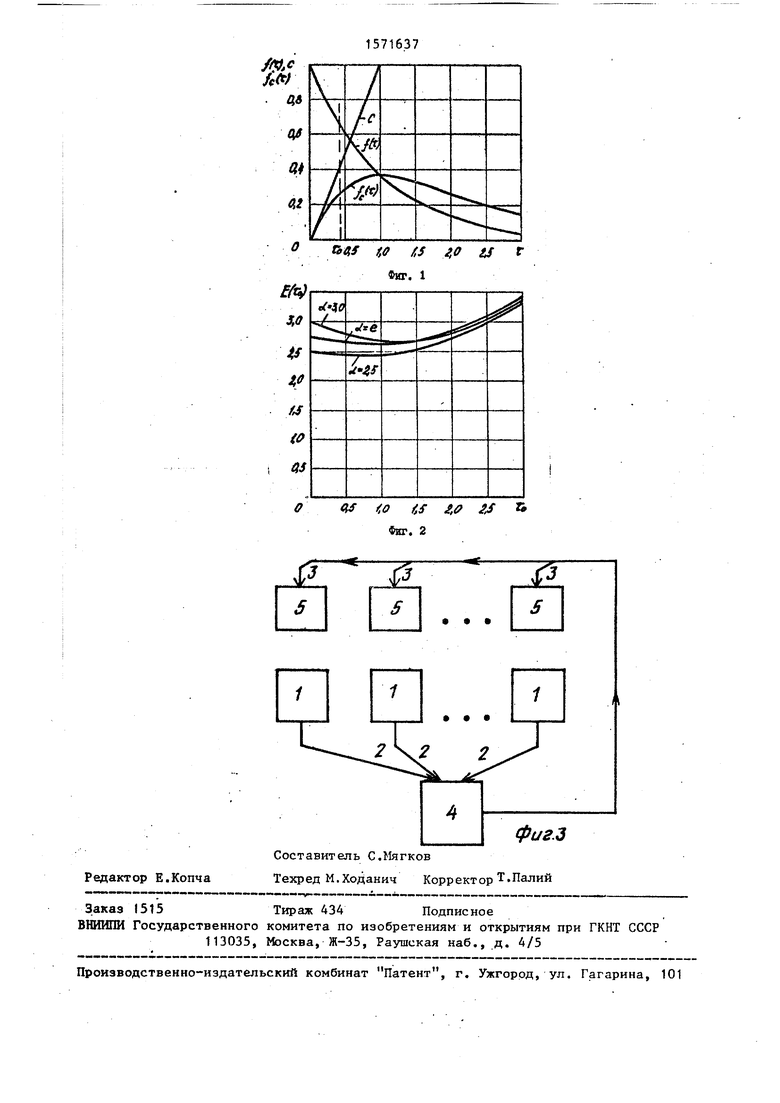
На фиг.1 изображены закон распределения 5(С) отклонения времени прихода Ј ПЕ на контрольные пункты, зависимость дополнительных эксплуатационных расходов С от С и произведение fс()с f(); на фиг.2 - зависимости суммарных дополнительных эксплуатационных расходов Е(Г0) от смещения Сй графика движения ПЕ; на фиг.З - устройство, реализующее предлагаемый способ.
Устройство, реализующее предложенный способ, содержит датчики 1 подвижных единиц, каналы 2 и 3 связи, блок 4 вычисления, подвижные единицы 5.
В качестве блока 4 вычисления может быть использована ЭВМ общего назначения, например ДВК-ЗМ.
Движущимся по магистрали ПЕ заданы моменты времени th прибытия на контрольные пункты (КП). Из-за отклонений в характере движения, параметров маел
1
О
со
ч
гистрали и подвижных единиц от расчетных фактические моменты времени прибытия ПЕ на КП t,, будут отличаться от плановых на D t$-tn 0.
Закон распределения плотности вероятности величин описывается функцией
данным tfl на
г , то можно утверждать, что для каждой ПЕ этой группы удельные эксплуатационные расходы составят
С, -а
а Ј t
(4)
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| Способ регулирования движения подвижных единиц | 1975 |
|
SU746680A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ МАРШРУТИЗИРОВАННЫМ ТРАНСПОРТОМ | 2005 |
|
RU2305326C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ ДВИЖЕНИЯ ПОДВИЖНЫХ ЕДИНИЦ НА ТРАНСПОРТНОЙМАГИСТРАЛИ | 1971 |
|
SU423159A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |
Изобретение относится к способам управления движением и может быть использовано в системах автоматизированного диспетчерского управления подвижными единицами (ПЕ). Целью изобретения является повышение точности способа при регулировании движения ПЕ, движущихся с произвольными интервалами. На контрольных пунктах (КП) регистрируют моменты прибытия Tф ПЕ. Время Tф сравнивают с плановым временем Tп прибытия и вычисляют отклонение Τ=Tф-Tп. Все Τ≥0 (для всех ПЕ и КП) табулируют и экспериментальный закон распределения плотности вероятности величин аппроксимируют функцией F(Τ)=λЕ @ . Затем вычисляют смещение Τ* плановых моментов времени Tп из условия миниминизации функции E(Τ0) расходов, связанных с опаздывающими ПЕ. Новое значение Tп вычисляют как Tп=Tп+Τ*, передают на ПЕ и используют для управления их скоростью на перегонах между КП. 3 ил.
Ј(Ј) Л b
./1C
(О
где f(Dl- распределение плотности
вероятности отклонений фактического времени прибытия от расчетного (задержек); jc И - параметр распределения. Каждое отклонение подвижной единицы от планового времени прибытия С больше нуля, задержка подвижной единицы по прибытию на КП вызывает дополнительные эксплуатационные расходы, которые пропорциональны величине за- |д ержки (отклонения)
С -а С ,
(2)
где а - коэффициент пропорциональности, равный величине эксплуатационных расходов, приходящихся на единицу времени задержки одной ПЕ.
Совокупные дополнительные эксплуатационные расходы у опаздывающих ПЕ, имеющих задержку, равную Ј, равны
Ј.(С)с . Ј(С)а. г- Д.-е
-АС
(3)
Приведенные на фиг.1 зависимости, описанные выражениями (1)-(3), построены в относительных единицах при А 1, а 1.
Пусть при неизменных временах отправления ПЕ с данного КП назначены некоторые новые плановые времена прибытия ПЕ на следующих КП t h , при чем t n-rtfi, a e t n-t n - смещение, вызванное назначением нового планового времени прибытия t n , одинаковое для всех ПЕ. При этом все ПЕ разделяются на две группы. В первую группу войдут ПЕ, ранее имевшие за- держку Ис$0, во вторую группу - задержку . Таким образом, ПЕ первой группы - это единицы, прибывающие на следующий КП до ив моменты времени t n.
Поскольку ожидаемое плановое время прибытия t n ПЕ первой группы на КП возросло по сравнению с ранее за
причем а0 а.
ПЕ второй группы, для которых t ф r th , по-прежнему оказываются опаздывающими на КП и распределение плотности вероятности величин их опозданий по-прежнему описываются (1).
После смещения плановых моментов времени прибытие ПЕ на КП на величину О дополнительные эксплуатационные расходы для ПЕ первой группы составляют
20
-
E/ Ml-e- 1 );.
(5)
где (1-е
-№й
) - количество подвижных единиц в первой группе, определенное интегрированием функции Ј() в пределах от нуля до Г о;
30
Для второй группы со
W 5 fc()dC a(0+)e .(6) С0
Тогда суммарные дополнительные эксплуатационные расходы для всех ПЕ могут быть выражены как функции Ј0 с параметрами Л, а , а0.
40
° 5
Е (Ов)ааЕ1(ив)+Ег(С0)а0 Ов +
а
+
-А«.
+ (а-а0). е -М.
-А1
Е(С0)-(в+ --- е v° +(oM)«
..
(8)
де 1 - коэффициент относи6 тельного сокращения эксплуатационных расходов в единицу времени при ликвидации задержки подвиж-. ной единицы и условия ее прибытия на контрольный пункт в запланированный момент времени t n .
515
Из зависимости Е(9) (см.фиг.2, да которой аИ ) следует что г определенному значению смещению плановых моментов времени t1 прибытия ПЕ на КП соответствует минимум дополнительных суммарных эксплуатационных расходов.
Способ реализуют следующим образом.
С помощью датчиков 1 регистрируют моменты времени t прибытия ПЕ на КП и по каналам 2 связи передают в блок 4 вычислений. В последнем вычисляют величины отклонений фактических
tj, ПЕ от плановых
Затем отклонения 1 ,0 (отклонения опаздывающих ПЕ) мобилизуют по величинам, строят экспериментальный закон аспределения плотности вероятности t и вычисляют значение параметра А , при котором функция (1) наилучшим образом (с минимальными отклонениями) описывает экспериментальный закон.
Для отыскания величины смещения плановых моментов времени прибытия ПЕ на КП решают, например, методом последовательности приближений уравнения
7Г )
0
ь л - ь
где Е(€0) определяется выражением (8)
После этого вычисляют новые плановые моменты времени прибытия ПЕ на КП t n t n + по каналам связи 3
передают их н а ПЕ 5.
На ПЕ время t n используется водителем, машинистом или непосредственно ПЕ для изменения скорости движения. Так, если вычисление t n происхо- дит периодически через некоторые интервалы времени, то увеличение tn на С вызывает- пропорциональное уве/П Х-u
личение ь , снижения средней скорости ПЕ на соответствующих периодах , между КП.
Если t n вычисляется непосредственно после прихода каждой ПЕ на КП, то увеличение t n на С вызывает изменение средней скорости ПЕ на участке перегона, так как информация о велиачине t n поступает на ПЕ в процессе
движения.
76
Формула изобретени..я
Способ регулирования движения подвижных единиц, основанный на измерении времени прибытия подвижных единиц на контрольные пункты, вычислении смещения планового времени прибытия подвижных единиц на контрольные пункты и формировании и передачи
на подвижные единицы планового времени прибытия подвижных единиц на контрольные пункты как суммы смещения заданного времени прибытия, отличающийся тем, что, с
целью повышения точности способа, вычисляют разности О фактического и планового времени прибытия подвижных единиц на контрольные пункты, строят экспериментальный закон распределения
плотностей вероятностей вычисленных разностей Q , больших или равных нулю, вычисляют значение параметра Л , минимизирующее отклонение аппроксимирующей функции f({) экспериментального закона распределения плотностей вероятностей разностей Ј , вычисляют величину смещения Г планового
времени прибытия подвижных единиц из выражения
30
-а. .
,
где Е („) (| + С//Л- е +
+W-PV
е
-АС,,
3 as - функция дополнительных эксплуатационных расходов подвижных единиц, для которых Q - смещение планового времени прибытия подвижных единиц на контрольные пункты;
.
где а - удельные дополнительные эксплуатационные расходы подвижных единиц, для которых 1 „ 1 t о:
afl- удельные дополнительные эксплуатационные расходы подвижных единиц, для которых О С 0,
изменяют скорость движения подвижных единиц пропорционально изменению планового времени прибытия на контрольные пункты.
&4f f,ff f,5 10 tf Г Фиг. 1
tf 0 t,S 2,0 If
Фиг. 2
P &
Редактор Б.Копча
фиг.З
Составитель С.Мягков
Техред М.Ходанич Корректор Т.Палий
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ ДВИЖЕНИЯ ПОДВИЖНЫХ ЕДИНИЦ НА ТРАНСПОРТНОЙМАГИСТРАЛИ | 1971 |
|
SU423159A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ регулирования движения подвижных единиц | 1975 |
|
SU746680A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
