1
Изобретение относится к управляемым бесконтактным электродвигателям постоянного тока.
Известны устройства управления реверсивным бесконтактным электродвигателем постоянного тока, например, шагового типа, содержащее две группы логических схем совпадения, к одним входам которых подключены два выхода командного устройства, а к другим - чувствительные элементы датчика положения с противоположным сдвигом порядка включения этих элементов в каждой группе логических схем.
Цель изобретения - обеспечение фиксированного останова электродвигателя.
Это достигается тем, что устройство снабжено дополнительной группой логических схем совпадения, к одним входам которых подключен третий выход командного устройства, а к другим - чувствительные элементы датчика положения симметрично по отношению к схеме включения этих же элементов в первых двух группах логических схем.
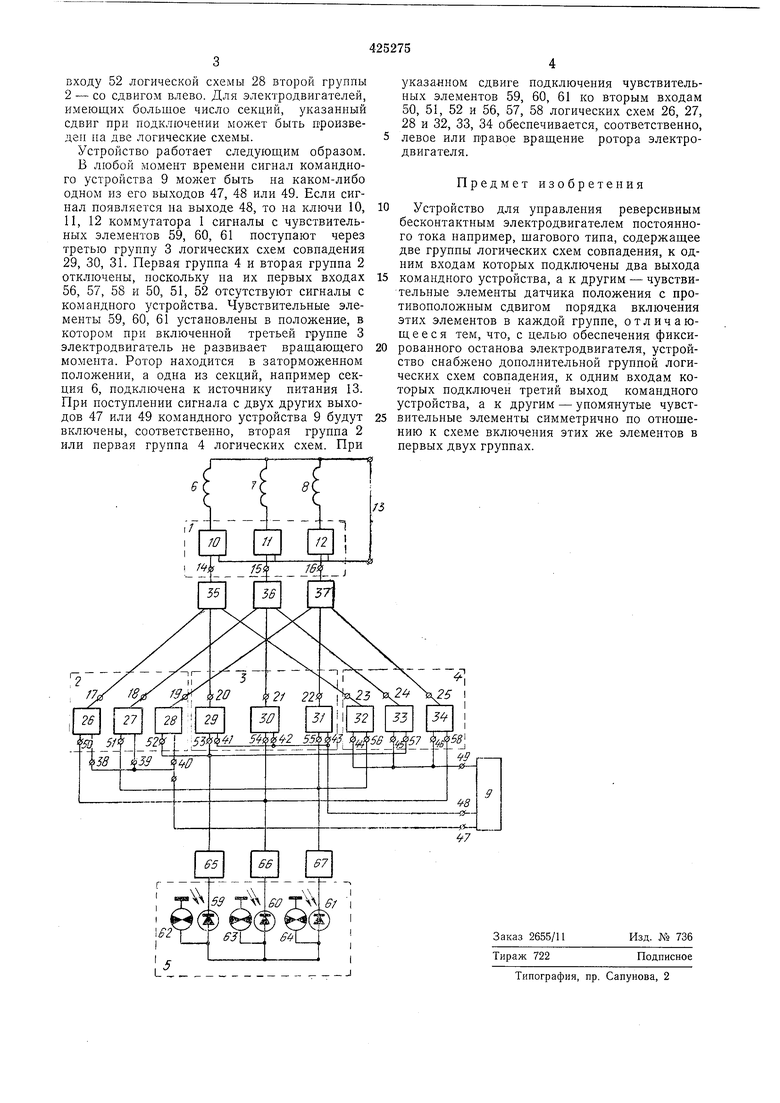
На чертеже изображена блок-схема устройства для управления реверсивным бесконтактным электродвигателем постоянного тока.
Устройство содержит коммутатор 1, три группы 2, 3, 4 логических схем совпадения, датчик 5 положения ротора, установленный на валу электродвигателя с секциями 6, 7, 8 якорной обмотки, и командное устройство 9. Ключи 10, 11, 12 коммутатора 1 соединяют секции 6, 7, 8 с источником питания 13. Входы 14, 15, 16 ключей 10, 11, 12 соединены с выходами
17-25 логических схем совпадения 26-34 через логические схемы «ИЛИ 35, 36, 37. Каждый вход, например вход 14, ключа 10 соединен с выходами 17, 20, 23 логических схем совпадения 26, 29, 32, принадлежащих различпым группам 2, 3, 4. Первые входы 38-40, 41-43, 44-46 логических схем 26-34 объединены по три и подключены к трем выходам 47, 48, 49 командного устройства 9. Ко вторым входам 50-58 логических схем 26-34 подключепы чувствительные элементы 59, 60, 61 (в данном случае фотодиоды, освещаемые от источников света 62, 63, 64) через усилительные элементы 65, 66, 67 (в общем случае), причем к третьей группе 3 логических схем
чувствительные элементы 59, 60, 61 подключены без сдвига, к первой группе 4 логических схем - со сдвигом на одну логическую схему вправо, а ко второй группе 2 - со сдвигом на одну логическую схему влево, считая все логические схемы устройства расположенные по кольцу. Например, чувствительный элемент 59 подключен ко второму входу 53 логической схемы 29 третьей группы 3 без сдвига, ко второму входу 57 логической схемы 33 первой
группы 4 - со сдвигом вправо, а ко второму
входу 52 логической схемы 28 второй группы 2 - со сдвигом влево. Для электродвигателей, имеющих большое число секций, указанный сдвиг при подключении может быть произведен на две логические схемы.
Устройство работает следующим образом.
В любой момент времени сигнал командного устройства 9 быть на каком-либо одном из его выходов 47, 48 или 49. Если сигнал появляется на выходе 48, то на ключи 10, 11, 12 коммутатора 1 сигналы с чувствительных элементов 59, 60, 61 поступают через третью группу 3 логических схем совпадения 29, 30, 31. Первая группа 4 и вторая группа 2 отключены, поскольку на их первых входах 56, 57, 58 и 50, 51, 52 отсутствуют сигналы с командного устройства. Чувствительные элементы 59, 60, 61 установлены в положение, в котором при включенной третьей группе 3 электродвигатель не развивает вращающего момента. Ротор находится в заторможенном положении, а одна из секций, например секция 6, подключена к источнику питания 13. При поступлении сигнала с двух других выходов 47 или 49 командного устройства 9 будут включены, соответственно, вторая группа 2 или первая группа 4 логических схем. При
указанном сдвиге подключения чувствительных элементов 59, 60, 61 ко вторым входам 50, 51, 52 и 56, 57, 58 логических схем 26, 27, 28 и 32, 33, 34 обеснечивается, соответственно, левое или правое вращение ротора электродвигателя.
Предмет изобретения
Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока например, шагового типа, содержащее две группы логических схем совпадения, к одним входам которых подключены два выхода командного устройства, а к другим - чувствительные элементы датчика положения с противоположным сдвигом порядка включения этих элементов в каждой группе, отличающееся тем, что, с целью обеспечения фиксированного останова электродвигателя, устройство снабжено дополнительной группой логических схем совпадения, к одним входам которых подключен третий выход командного устройства, а к другим - упомянутые чувствительные элементы симметрично по отношению к схеме включения этих же элементов в первых двух группах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Вентильный электродвигатель | 1974 |
|
SU527804A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Система для сортировки листовых материалов | 1980 |
|
SU1007760A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Вентильный двигатель | 1975 |
|
SU692013A1 |
| Устройство для управления реверсивным бесконтактным электродвигателем постоянного тока | 1978 |
|
SU767908A2 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
