1
Изобретение относится к области машиностроения и может найти применение при разметочных работах, а также в тех случаях, когда необходимо получить прямолинейное движение точки независимо от направления приложенной силы.
Известны механизмы планетарного типа для преобразования вращательного движения в возвратно-поступательное, содержащие опору, ведущий рычаг, два установленных на его концах вала, один из которых - ведущий установлен со свободой вращения в опоре и жестко связан с ведущим рычагом, а другой - ведомый установлен со свободной вращения относительно ведущего рычага, шкивы, один из которых неподвижно установлен в опоре соосно ведущему валу, а другой, расположенный в одной плоскости с первым шкивом, жестко связан с ведомым валом, бесконечный гибкий элемент, обхватывающий оба шкива, и ведомое звено, жестко связанное с ведомым валом.
Однако с помощью таких механизмов на жестком звене можно получить только криволинейные траектории. Для обеспечения прямолинейной траектории неподвижному шкиву, установленному в опоре, необходимо прИха,ать дополнительное вращение по нелинейному закону.
Цель изобретения - получение прямолинейной траектории на ведомом звене.
Для этого ведомое звено выполнено в виде
диска, радиус которого равен расстоянию
между осями ведущего и ведомого валов, а
диаметр шкива, установленного в опоре, в два
раза больше диаметра шкива, связанного с
ведомым валом.
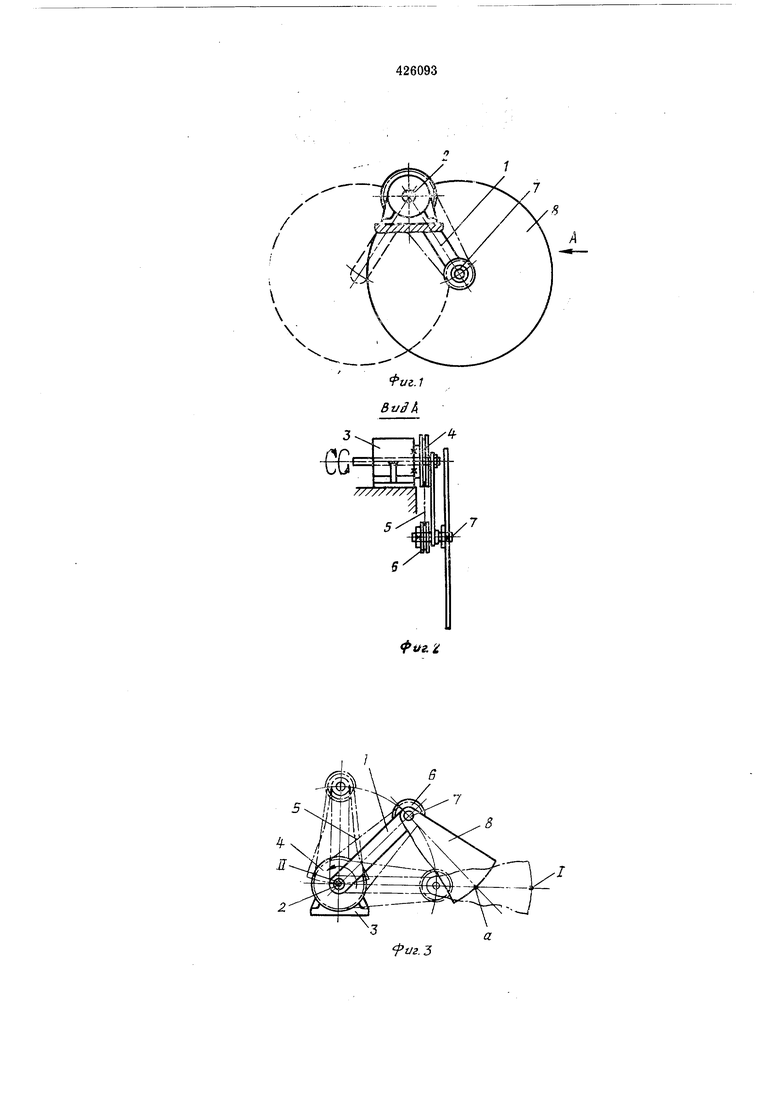
На фиг. 1 изображен предлагаемый механизм; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - механизм в работе.
Ведущий рычаг 1 жестко соединен с ведущим валом 2, установленным в опоре 3. Соосно с ведущим валом на опоре неподвижно
установлен шкив 4, связанный посредством бесконечного гибкого элемента 5 со шкивом 6, установленным посредством ведомого вала 7 на другом конце ведущего рычага. На ведомом валу также закреплено ведомое звено 8.
Диаметр шкива на ведомом валу в два раза меньше диаметра шкива на ведущем валу.
При вращении ведущего рычага 1 гибкий элемент 5, сматываясь с одной стороны шкива 4 и наматываясь на его другую сторону,
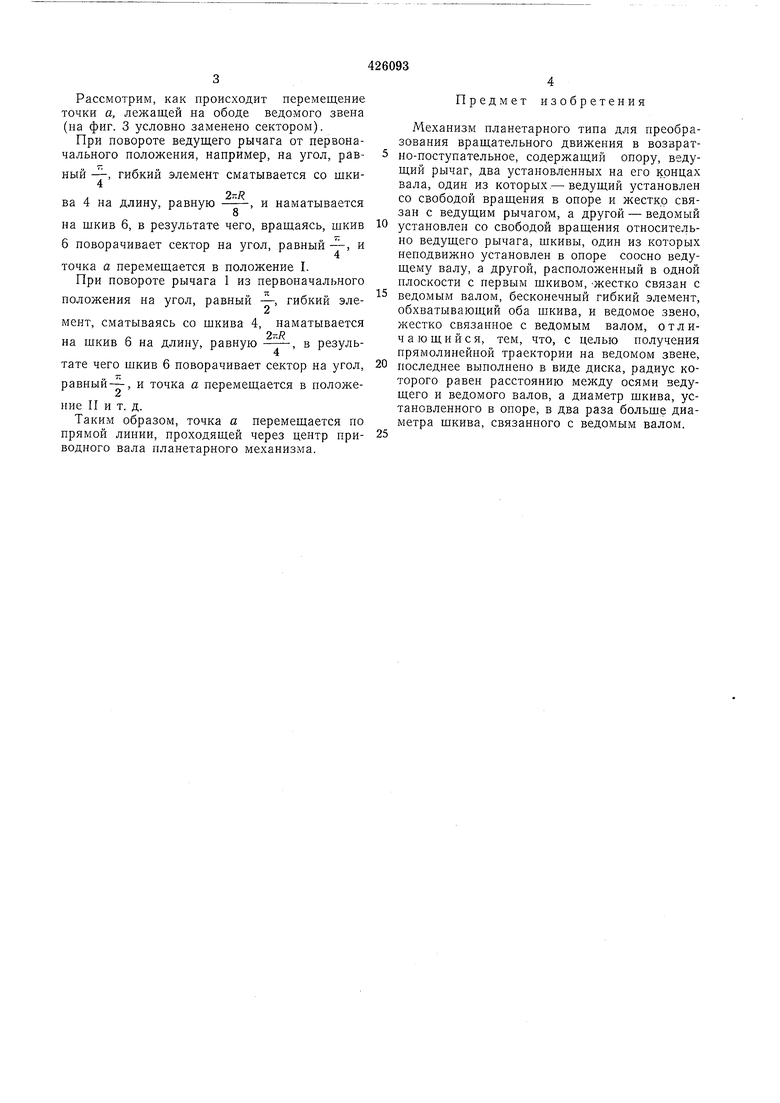
приводит во вращение через шкив б ведомый вал планетарного механизма и закрепленное на нем ведомое звено 8, точки которого, лел ащие на ободе, описывают прямолинейные траектории, проходящие через центр приводного вала.
Рассмотрим, как происходит перемещение точки а, лежащей на ободе ведомого звена (на фиг. 3 условно заменено сектором).
При повороте ведущего рычага от первоначального положения, например, на угол, равный -, гибкий элемент сматывается со щки4
2r.R
ва 4 на длину, равную , и наматывается
8 на щкив 6, в результате чего, вращаясь, шкив
6 поворачивает сектор на угол, равный --, и
точка а перемещается в положение I.
При повороте рычага 1 из первоначального
положения на угол, равный -, гибкий элеЛг
мент, сматываясь со щкива 4, наматывается
„2л/
на шкив 6 на длину, равную, в результате чего шкив 6 поворачивает сектор на угол, равный-, и точка а перемещается в положение II и т. д.
Таким образом, точка а перемещается по прямой линии, проходящей через центр приводного вала планетарного механизма.
Предмет изобретения
Механизм планетарного типа для преобразования вращательного движения в возвратНС-поступательное, содержащий опору, ведущий рычаг, два установленных на его концах вала, один из которых.- ведущий установлен со свободой вращения в опоре и жестко связан с ведущим рычагом, а другой - ведомый
установлен со свободой вращения относительно ведущего рычага, шкивы, один из которых неподвижно установлен в опоре соосно ведущему валу, а другой, расположенный в одной плоскости с первым шкивом, -жестко связан с
ведомым валом, бесконечный гибкий элемент, обхватывающий оба шкива, и ведомое звено, жестко связанное с ведомым валом, отличающийся, тем, что, с целью получения прямолинейной траектории на ведомом звене,
последнее выполнено в виде диска, радиус которого равен расстоянию между осями ведущего и ведомого валов, а диаметр шкива, установленного в опоре, в два раза больше диаметра щкива, связанного с ведомым валом.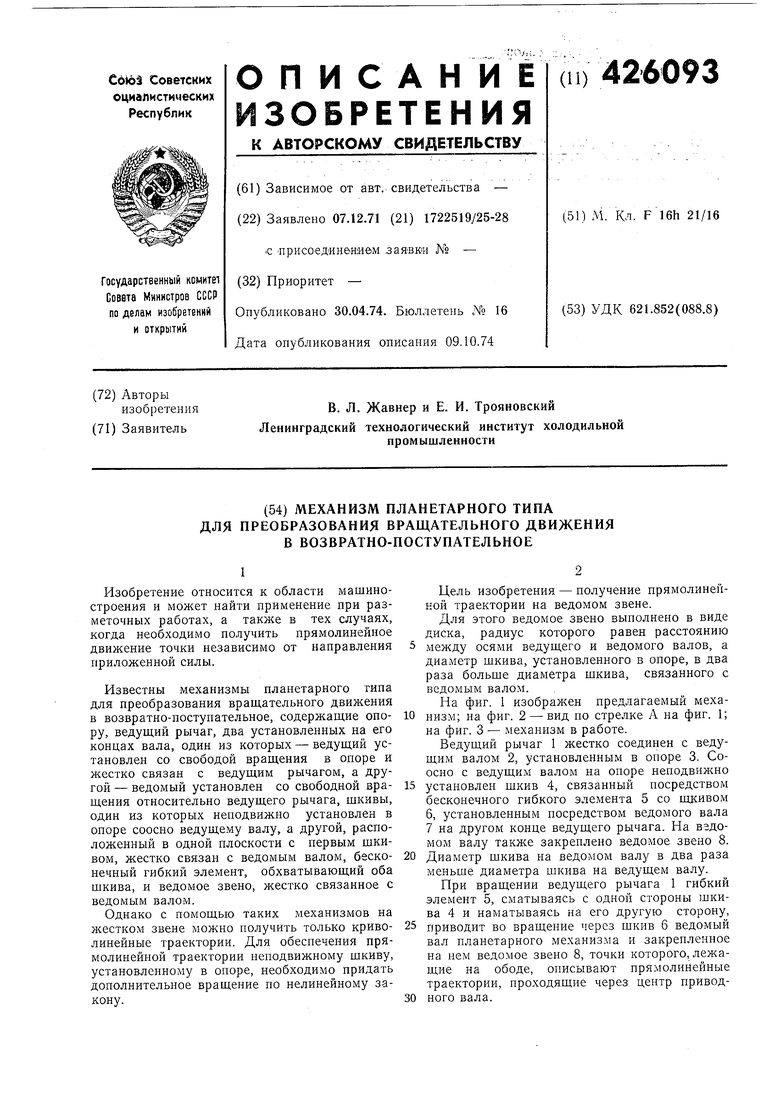
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕССТУПЕНЧАТЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2221946C2 |
| Опора шагающей машины | 1977 |
|
SU751701A1 |
| Режущий аппарат | 1981 |
|
SU1042657A1 |
| Передаточный механизм | 1936 |
|
SU53739A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В НЕПРЕРЫВНОЕ ВРАЩАТЕЛЬНОЕ И МЕХАНИЗМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505722C2 |
| Лесопильная рама (ее варианты) | 1983 |
|
SU1140947A1 |
| Опора шагающего транспортного средства | 1978 |
|
SU745763A1 |
| Клиноременный вариатор | 1986 |
|
SU1375890A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| Механизм привода выгрузного шнека бункера зерноуборочного комбайна | 1980 |
|
SU1011073A1 |