пом шарнире нижнего конца бедра голень, вал Koropuii -посредством гибкой нередачи, нмеющец ведущнй ы ведомый Sc ieMciiTbi, связан с приводом ее новорота, нрнчем нрнви/1, поворота голени уетановлеи на ICopHyce двухстеиенного шарнира .
Последнее устройство, имея требуемый по условням движения диапазон углов новорота звеньев, устраняет осноанои недостаток- иовышенныи маховьи момент, однако в пем сохраняется зависнмость угла между бедром и голенью от движення бедра, что требует корректируюгцей работы привода голенн, т. е. его дополнительной нагрузки.
Цель изобретения - исключить рассоглаеование углов между голепью и бедром при повороте ноеледнего.
Поставленная цель достигается, тем, что в опоре шагающей машины, содержаш ей корпус двухстепенного шарнира, установленный па вертикальной оси рамы машины и снабженный приводом его поворота, бедро, установленное своим верхним концом в горизонтальном шарнире названного корпуса, соединенное своим валом с приводом поворота в вертикальной плоскости, п устаповлеппую в горизонтальном шарнире нижнего конца бедра голеиь, вал которой посредством гибкой нередачн, имеюш,ей ведупл,ий и ведомый элементы, связан с приводом ее поворота, опора сиабжена дпффереициальпо передачей с коропной нтестерней, воднлом н солнечным колесом, одно из звеньев которой соединено с ведундим элемеитом гибкой передачп, а два других через согласуюпл,ие редукторы - с приводом иоворота бедра п поворота голеии соответственно; кроме того, коронная шестерня соедннеиа с ведугцим элементом гибкой передачи, солнечное колесо - с нриводом поворота бедра, а водило - с приводом поворота голенн; водило соединено с ведушим элементом гнбкой передачп, коронная шестерня - с ирнводом вращения бедра, а солнечное колесо - с приводом поворота голеии; солиечиое колесо соедгшено с ведущим элементом гибкой иередачи, водило - с приводом вращения бедра, а коронная шестерня - с приводом поворота голени.
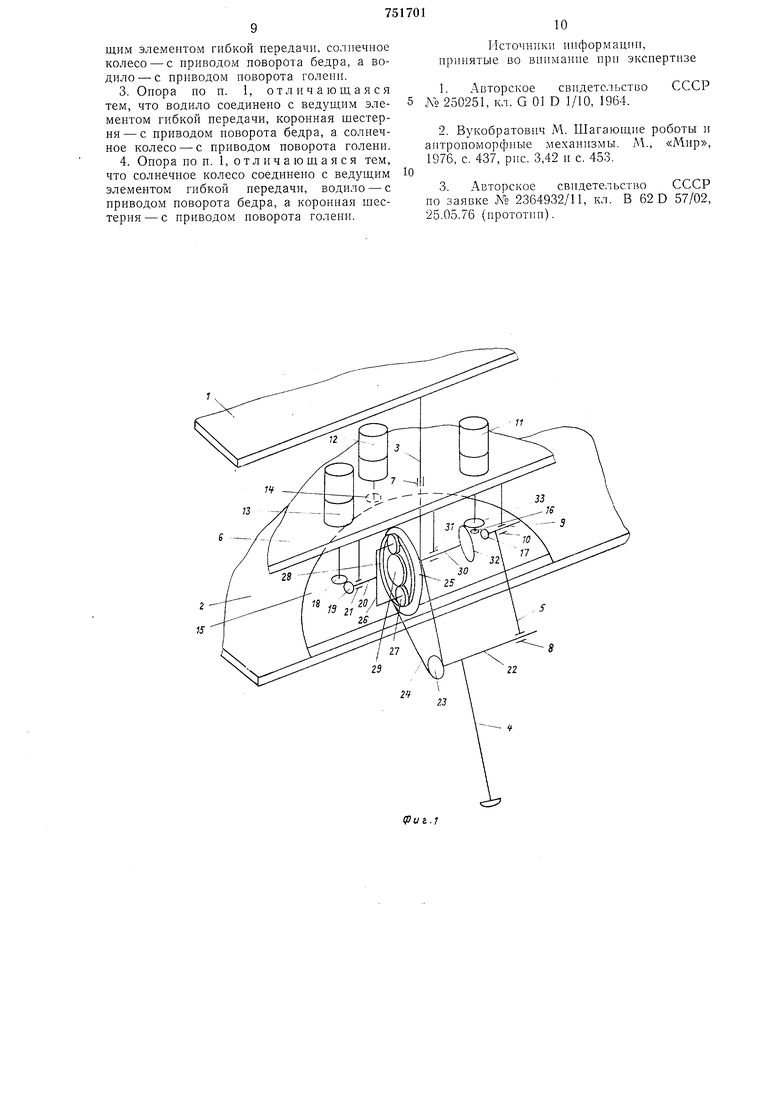
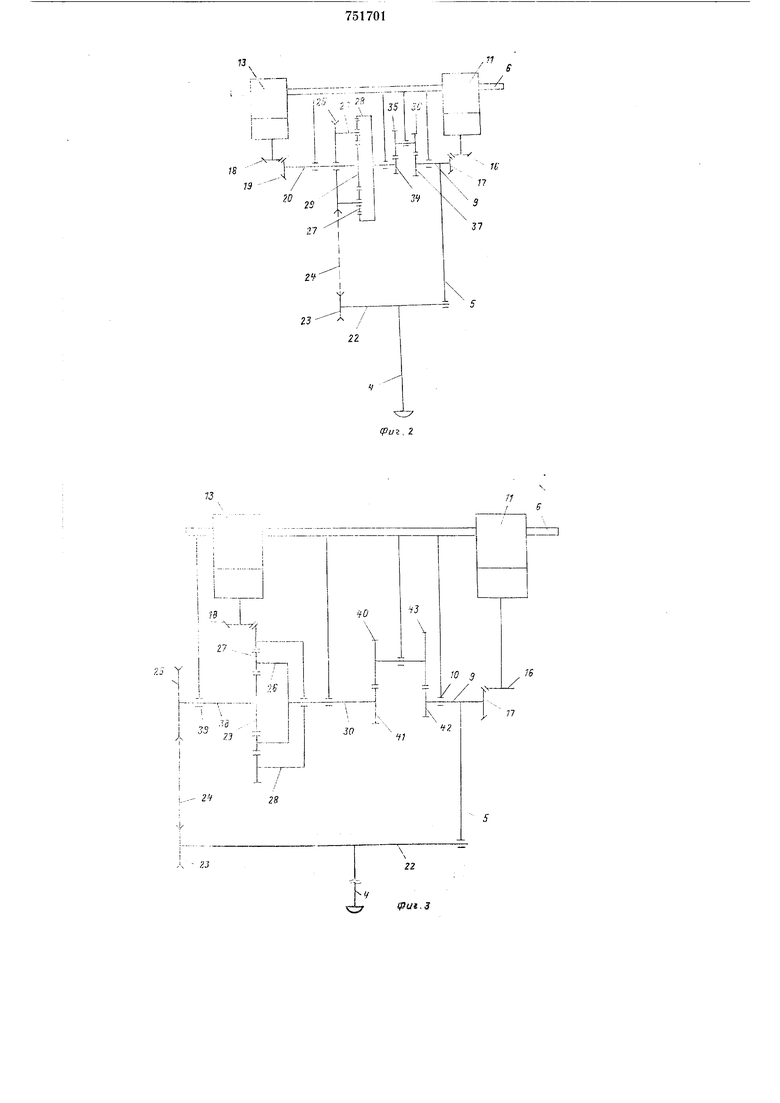
На фиг. 1 схематически изображеиа опора с приводами и связываюгцей их дпфференциальной передачей, на фиг. 2 и 3 - варнанты оноры с различным назначением элементов дифферснцналыюй передачи.
Опора шагающе машины (см. фиг. 1) крепится к корпусу, выиолпеиному в виде расположенных одна ад другой рам 1 н2, скрепленных между осью 3. Верхняя рама 1 служит для установки аннаратуры обзора и управлення. а ось 3 - для крепления онор машины. Каждая опора состоит нз голени 4, бедра 5 н выполненного в виде площадки корпуса О двухстеиеппого шарпира, который с иомогцью подшипника 7
установлен на осн о. Голень 4 и бедро 5 связаны между собой горизоитальны.м цилиндрическим чилеппым niapniipoM 8, а вал 9, иа которолй закреилено 5, yciantjB:1ен па корпусе о в шарнире 10. Голеиь 4, бедро о н корпус (J двулстепенпого шарнира приводятся ц двпжеиие с помощью следяпгпх приводов 11 - 1,J, которые жестко установлеиы на корпусе О п выполнены
в внде редукторных электродвн1ателей, электрически связани1 х с аппаратурой управления. При этом 1 ыходной вал привода 12 поворота опоры посредством зубчатого колеса 14 связан с зубчатым сектором
15, закреплеппым иа пеподвнжной раме 2. Выходной вал нривода 11 поворота бедра 5 с помощью шестерии 16 и шестерни 17 связан с валом 9, иа котором закреплено бедро 5. Выходной вал привода 13 поворота
голени 4 щестернями 18 и 19 связан с валом 20, установленным на корпусе 6 двухстеиенного шарнира с помощью подшипника 21. Вал 20 параллелен валу 9 и перпендикулярен к осп 3. Голень 4 закреплена на
валу 22, на котором установлен шкнв 23, связанный гибкой передачей 24, нанример ременной, со шкнвом 25. Шкив 25 приводится в движеине от выходного звена планетарной дпфференциальиой передачи, которая состоит из водила 26 с устаиовлепными на нем сателлитами 27, короиной шестерни 28 п солнечной шестерни 29. При эгом водило 26 иасажеио на вал 20, а солнечная шестерня 29 установлена па валу 30,
который посредством подшниника 31 прикреплен к корнусу 6. Вал 30 посредством шестерен 32 ji 33 связан с приводом 11 новорота бедра 5. Шкив 25 гибкой передачи 24 жестко связан с коронной шестерней 28,
которая заценлепа с сателлитамн 27. Коронная шестерня 28 является выходным звеном дифференциальной передачи. При этом передаточные отношения согласующих передач выбираются из следующих
условий:
О,
(1)
D,
(2)
,
де DK - начальный диаметр короппой
шестернн 26;
/)( - начальный диаметр со-тнечной Hie стер lu-i 29;
DI--диаметр П1кнва 25; Da дпамет) П1кива 23; 0с - угловая скорость солпечпой шестерни 29; сов - угловая скорость водила 26;
шг - заданная угловая скорость вращения голени 4 относительно бедра 5, вырабатываемая аннаратурой уиравления в соответствии с условиями движения; т-, - залагпгая угловая скорость вращения бедра 5. вырабатываемая аппаратурой управленпя в соотгзетствпи г условпями лвижеиття. Зттак минус указывает на противополож 1ое направление угловых скоростей сос и юбПри лвижеггни опоры сигналы управления поступают на слелящие прнволы II - 13. Так как зубчатый сектор 15 жестко связан с рамой 2. то зубчатое колесо 14 при вряшенни выхолного вала нрнвола 12 поворота опоры обкатывается по зубчатому сектору 15, заставляя корпус б лвухстепенного шарннра совершать вращенне относительно оси 3, при этом белро 5 вместе с голенью 4 также булут вращаться относительно оснЗ, обеснечнгая тем самым горизонтальное лвнженне щагаюн1ей маншны при взаимолейств пощих с грунтом опорах н перенос своболиых опор. Снгналы на иолъем и опускание белра 5 относительно корпуса 6 (слелователыю, н относителг но корпзса машины), поступающне на прнвол 11 поворота белра 5, через шестерни 16. 17 приводят в лвиженне вал 9 с закрепленным на нем белром 5, вызывая не только его вратнение, но н вращение через согласующне HiecTepiiH 32, 33 солнечной шестерни 29. Если при этом на нривол 13 поворота голени ностунают снгналы управления, то водило 26 нрнводит в лвижение сателлиты 27, которые получая лобавочное вращенне от солнечной шестерни 29, приводят во вращение коронную шестерню 28 и соелиненный с ней шкив 25. Далее через гибкую перелачу 24. шкив 23 и вал 22 лвиженне передается на голень 4. При этом движенне голенн 4 относнтельно белра 5 склалывается из лвух движеннй. Олно вызывается вращением выхолного звена лнфференииальной нерелачн Скороггной шестерни 28 н связанного с ней щкнва 25), а лругое - обкатыванием гибкой нерелачи 24 относите.льно шкнва 25 пр1 лвиженнн белра 5 относительно корнуса машнны. что с учетом диаметров П1КНВОВ может быть записано в виле слелуюи1его соотношения: .ч («25 - ®б). где С023 - угловая скорость щкива 23, 0)25 - угловая скорость шкива 25. Еслн бы в оноре отсутствовала связь между нриводами белра и голенн через дифференциальную передачу, то при неподвггжиом белре (гоб 0) голень 4 (н шкив 23) должна была бы нметь заданную скорость двнження ov. Отсюла с учетом соотношення (3) слелует, что --«б (4) ч-гн, непеходя к тдам. ле гг:т- - угол попорота голени 4: фг - тpeбyc ый угол между голенью 4 н бедром 5 (задается аннаратурой унравлення); фг, - треблтмьтй угол белром 5 н корпусом (задается аниаратурой управления). Такнм образом, уго.т (гу. на который повепнется шкнв 23 н свя..янняя с ним через вя,ч 22 голень 4. буде отличаться от угла, затаваемого аппаратурой управления, на D, величнну Например, ири отсутствин сигналов на изменение положения голеитт ((Ог 0) ф2з ,-;, т. е. голень 4 отклоттяется относнтельно белра 5 вместо того, чтобы оставаться иеиодвнжной. и нрнвод 13 поворота голенн должен отработать это оттслоненне, хотя снпялов от аинапатурьт уиравлення 1ТП ппчвод не ностуняет. же пР1роды 11 н 13 связаны между собой днфференниальной передачей (см. Фттг. П. зарлтснлюсть уг.човой скорости оья ,а 25 от лтловых скоростей солтчечгтой тнестерии 29 и водила 26 онределяется нз формулы: Лс Прн ЭТОМ угловая скорость голенн 4 будет ттметь следующий вид: ) . (7) Л, /л, л,D, (Ч. (М Л, I л,л,, Тогда, еслн выбоп согласуюшнх передач (18-19 и 17-IB : соответствует прнведенттьти условням (формулы I TI 2), имеем: Л, /л,. : Л,,Лк- Л-, %з- -( D,. /5, -I- D., Л, -I:нли (023 Wr Т. е. независимо от движения бедра 5 голень 4 всегда лвижется с той угловой скоростью, которая залается анпараTypoii унравления. Еслн, например, (, то и f024 0, т. е. прп отсутствнн сигналов унравлення на приволе 13 поворота голеин и сама голень 4 неподвижна независимо от того, движется бедро 5 или нет. Это объясняется тем, что при пь брани1;тх указанным образом передаточных отиошеннях угловая скорость коронной нтестерии 28 и соответственно шкива 25 будет равна угловой скорости нодъема бедра 5 относнтельно корнуса.так к.ак нрн иенодвнжном водиле 26 0,,, Г- ..., сат J к У V -Ос где Dear - диаметр начальной окрул ности сателлитов 27. В результате, в процессе сгибания бедра 5 относительно рам 1 и 2 передача 24 остается неподвижной относительно шкива 25 и не вызывает поэтому поворота голени 4 относительно бедра 5 в шарнире 8, как это имело бы место в случае неподвижного шкива 25. Аналогнчным образом происходит компепсапня движений бедра 5 и при работающем приводе 13 поворота голепи. На фиг. 2 приведен другой вариант соединения звеньев планетарной дифференциальной передачи с приводами 13 и 11 поворота голени и поворота бедра соответственно. В этом случае в качестве выходного звена используется водило 26, с которым связан шкив 25. При этом солнечная шестерня 29, посаженная на вал 20, приводится во Вращение через согласующие шестерни 19, 18 от привода 13 поворота голени, а коронная шестерня 28 - через согласующие шестернн 34, 35 и 36, 37 связана с валом 9. При этом передаточные отпошеппя согласующих редукторов выбраны из следующих соотношений: (.| ./у,- Л/9f-1r +ъ;) ° . ( На фиг. 3 приведена кинематическая схема опоры в случае использования солнечной шестерни 29 в качестве выходного звена планетарной дифференциальной передачи. На валу 38 сидит шкив 25 и солнечная шестерня 29. Вал 38 с помощью подщнпника 39 связан с корпусом б двухстепенного шарпира. При этом коронная шестерня 28 получает вращение от привода 13 поворота голени через шестерню 18, а водило 26 связано через согласующие щестерни 40-43 с валом 9, на котором закреплена голень 5, связанным через шестерни 16 и 17 с приводом 11 поворота бедра, а передаточные отнощения выбраны из следующих условий: .Г(12) ьк А З .Работают планетарные дифференпчальные передачи, изображенные па фиг. 2 и 3, аналогично описанной передаче на фиг. 1. Дифференциальная связь между приводами голени и бедра может быть выполнена не только в виде планетарных механизмов с шестернями внутреннего зацепления, но и на цилиндрических или конических зубчатых колесах, фрикционных элементах И т. п. Использование какого-либо из описаппых вариантов определяется скоростными и нагрузочными характеристиками используемых приводов и требованиями к скоростям и нагрузкам на опору. Например, вариант, изображенный на фнг. 2, нмеет преимущества перед вариантом на фиг. 1 из-за меньших передаточных отношений согласующих передач. Однако его целесообразно применять только в случае примерно одинаковых по ве.;1ичине моментов, прикладываемых к шарнирам голени и бедра. Если же момент, воспринимаемой голенью, значительно меньще момента, воспринимаемого бедром, то целесообразнее применять вариант на фиг. 2, в цротивоположном случае - вариант па фиг. 3 (когда момент на бедре меньше момента на голени). Таким образом, при исцользовании предложенной опоры привод голенн должен отрабатывать лищь ту величину угла между голенью и бедром, которая вырабатывается аппаратурой управления, компенсация же влияния движения бедра осуществляется механически, с помощью дифференцналыюй связи между приводами. Прпмепение изобретения позволяет умепьшить максимальную угловую скорость, развиваемую приводом голеии, на величину максимальной угловой скорости бедра, т. е. примерно вдвое, что приводит к уменьшению требований к скоростным характеристикам привода, сокращая примерно на 50% диапазон его регулирования по скорости, к его упрощению и уменьшеиию мощности либо позволяет вдвое новысгггь скорость передвижеиия. Формула изобретения 1.Опора шагаюшей машины, солер/каН1ая корпус двухстепенного шарпира, установленный на вертикальной оси рамы маП1ИИЫ и снабженттый приводом его поворота, бедро, установленное своим верхним концом в горизонтальном тпаринре корпуса н соедииеппос своим валом с приводом поворота в вертикальной плоскости, и установленную в гортгзонтальном тнарнире щжнего конп,а бедра голень, вал которой посредством гибкой перелачи, имеющей ведущий и ведомый элементы, связан с приводом ее поворота, отличающаяся тем, что, с целью устранения рассогласования угла между голеттью и бедном при повороте последпего, она снабжена дифференциальной передачей с коронной шестерней, водилом и солнечном колесом, одно з звеньев которой соединено с ведущим элементом гибкой передачи, а два других через согласующие редукторы - соответственно с приводами поворота бедра и поворота голени. 2.Опора по п. 1, отличающаяся тем, что коронная шестерня соединена с ведущим элементом гибкой передачи, солнечное колесо - с приводом поворота бедра, а водило - с приводом поворота голеии.
3.Опора по п. 1, отличающаяся тем, что водило соединено с ведущим элементом гибкой передачи, коронная шестерня- с приводом поворота бедра, а солнечное колесо - с приводом поворота голени.
4.Опора по п. 1, отличающаяся тем, что солнечное колесо соединено с ведущим элементом гибкой передачи, водило - с приводом поворота бедра, а коронная щестерня - с приводом новорота голеии.
10
Источники пиформадии, принятые во внимание ирн экспертизе
СССР
1. Авторское свидетельство 5 Л 250251, кл. G 01 D 1/10, 1964.
2.Вукобратович М. Шагающие роботы и антропоморфные механизмы. М., «Мнр, 1976, с. 437, рис. 3,42 и с. 453.
3.Авторское свидетельство СССР по заявке N° 2364932/11, кл. В 62 D 57/02, 25.05.76 (прототин).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающая опора транспортного средства | 1980 |
|
SU933533A1 |
| Опора шагающего транспортного средства | 1978 |
|
SU745763A1 |
| Опора шагающего транспортного средства | 1976 |
|
SU716898A1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| Коленный механизм протеза бедра | 1985 |
|
SU1421333A1 |
| КОРОБКА ПЕРЕДАЧ | 1992 |
|
RU2068516C1 |
| Многоопорное транспортное средство с бортовым поворотом | 1983 |
|
SU1111926A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013606C1 |
| Протез бедра | 1988 |
|
SU1532022A1 |
| Стенд для испытаний карданных передач | 1988 |
|
SU1633304A1 |
13
30
II
I e
7j
75
70 5
f.
