I
Изобретение относится к шагающим транспортным средствам, и, в частности, к их опорам, выполненным в виде бедра и сочлененной с ним голени.
Известна опора шагающего механизма, содержащая голень, шарнирно прикрепленную к бедру, которое посредством -двухстепенного шарнира прикреплено к корпусу транспортного средства, и раздельные приводы поворота голени и бедра относительно корпуса в двух взаимно перпендикулярных направлениях, причем привод поворота голени установлен на бедре и выполнен в виде электродвигателя с редуктором, на выходг. ном валу которого установлен червяк, взаимодействующий с червячным колесом, жест- ко соединенным с голенью (1).
Недостаток такой опоры заключается в расположении привода голени на конце бедра, что значительно увеличивает маховой момент опоры за счет увеличения момента инерции бедра, что увеличивает мощность и габариты привода бедра.
Известна другая опора шагающего транспортного средства, содержащая корпус двухстепенного шарнира, поворотно установленный на вертикальной оси рамы транспортноГО средства, голень, соединенную горизонтальным шарниром с нижним концом бедра, имеющего на верхнем конце жестко прикрепленный к нему горизонтальный вал, который поворотно установлен в корпусе двухстепенного шарнира и соединен с приводом вращения, и привод поворота голени, соединенный с ней гибкой передачей, ведущее звено которой установлено соосно с валом бедра, а ведомое - соосно с шарниром голени .и жестко присоединено к последней 2. Недостаток такого устройства заключа10ется в том, что сохраняется зависимость угла между бедром и голень ю от движений бёдра, что требует корректирующей работы привода голени, т.е. его дополнительной нагрузки.
15
Цель изобретения - исключить влияние, поворота бедра в вертикальной плоскости на угол между ним и голенью при сохранении малого махового момента бедра.
Поставленная цель .достигается тем, что
20 корпус привода поворота голени жестко крепится к горизонтальному валу бедра.
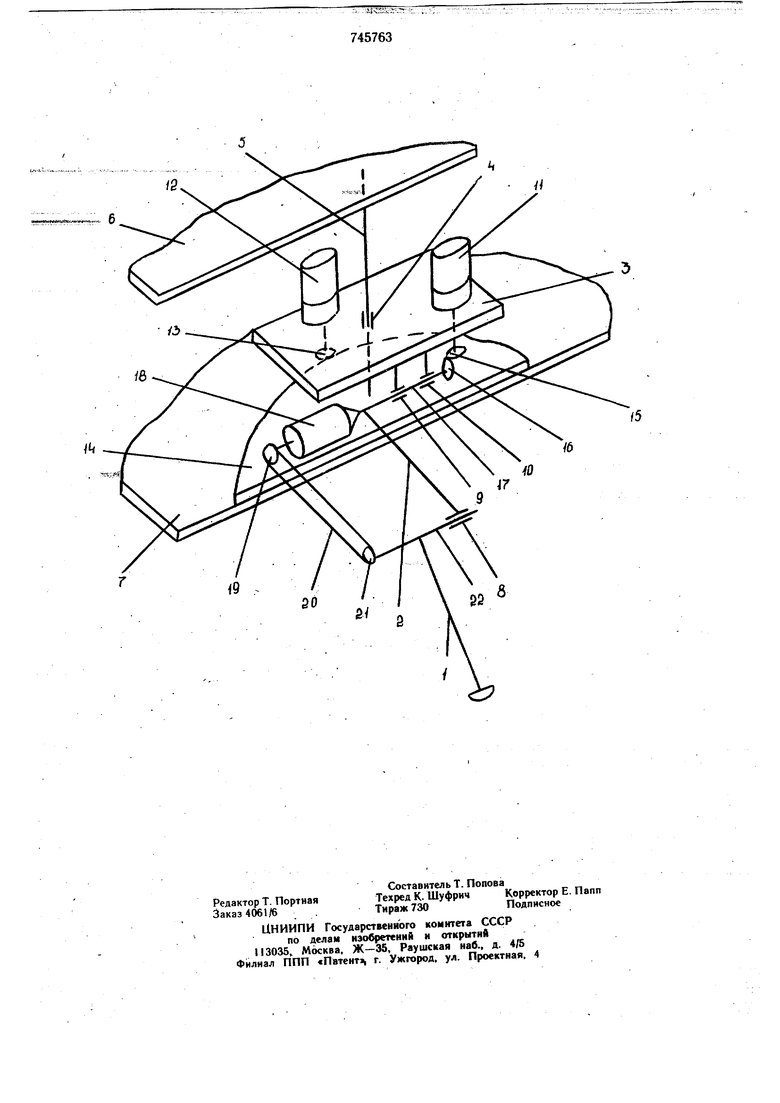
На чертеже схематически изображена опора с приводами. Опора состоит из голени I, бедра 2 и выполненного в виде площадки промежуточного звена 3, которое с помощью подщипника 4 установлено на оси 5. Ось 5 крепится к корпусу тиашины, состоящему из двух расположенных друг над другом рам 6 и 7, и предназначена для установки на ней опоры. На верхней раме 6 устанавливается аппаратура управления. Голень 1 и бедро 2 связаны между собой цилиндрическим коленным шарниром 8, а бедро 2 и промежут-очное звено 3 - цилиндрическими шарнирами 9 и 10. Бедро 2 и промежуточное звено 3 приводятся в движение с помощью состоящих из электродвигателей с редукторами, следящих приводов II сгибания бедра и переноса опоры 12, установленных на промежуточном звене 3 и связанных электрически с аппаратурой управления. При этом выходной вал привода 12 переноса опоры с помощью зубчатого колеса 13 связан с зубчатым сектором 14, неподвижно закрепленным на раме 7 корпуса. Выходной вал привода 11 сгибания бедра с помощью шестерен 15 и 16 связан с валом 17, на котором закреплено бедро 2 опоры. Вал 17 и промежуточное звено 3 связаны между собой с помощью щарниров 9 и 10. К валу 17 жестко крепится привод 18 голени, выходной вал которого через ведущий шкив 19 и цепь 20 передает движение на щкив 21, насаженный на вал 22. Последний жестко связан с голенью 1 и может поворачиваться относительно бедра 2 и шарнира 8. Таким образом, ось 5, промежуточное звено 3 и вал 17 образуют двухстепенной шарнир для крепления опоры к машине. Промежуточное звено 3 играет рблЬ кбрпуса Этого шарнира. При движении машины выработанные аппаратурой управления сигналы поступают на приводы 18, II, 12, в результате чего прибод;ятся Во вращение выходные валы их редукторов. Так как зубчатый сектор 14 жестко связан с рамой 7 корпуса, зубча ToeKOjrTeco 13 при вращении вШоХноговала привода переноса опор 12 обкатывается по сектору 14, заставляя промежуточное звено 3 совершать вращение относительно оси 5. Поскольку бедро 2 связано со звеном 3 при ПбНОЩН цилиндрических шарниров 9 и 10, то вместе с голенью I также будет враЩаться относительно оси 3, обеспечивая тем саjvifcJM горизонтальное движение машины (с помощью опор, взаимодействующих с грунтом) или перенос свободных опор/
7457В,Т Сигналы на подъем и опускание бедра 2 относительно промежуточного звена 3 (а, следовательно, и корпуса машины) поступают на привод бедра II, который через шестерни 15 и 16 приводит в движение вал 17 с закрепленным на нем бедром 2. Аналогично сигналы на сгибание опоры в колене, поступающие на следящий привод 18, через щкив 19.и цепь 20 приводят во вращение относительно бедра 2 шкив 21 и вал 22, с которым связана голень I. Таким образом, при данном расположении приводов движение бедра в вертикальной плоскости не вызывает ответного движения голени в противоположном направлении (несмотря на наличие гибкой связи). Например, при движении бедра вверх и при отсутствии сигналов на приводе голени цепь 20 не обкатывается по шкиву 19 и не вызывает .поворота щкива 21 в сторону сближения голени и бедра, поскольку щкив 19 совместно с приводом 18 вращается вокруг вала 17, т.е. влияние движения голени в данной опоре устранено. Формула изобретения Опора шагающего транспортного средства, содержащая корпус двухстепенного шарнира, поворотно установленный на вертикальной оси рамы транспортного средства, голень, соединенную горизонтальным шарни ром с нижним койцом бедра, имеющего на верхнем конце жестко прикрепленный к нему горизонтальный вал, который поворотно установлен в корпусе двухстепенного шарнира и соединен г приводом вращения, и привод поворота голени, соединенный с ней гибкой передачей, ведущее звено которой установлено соосно с валом бедра, а ведомое - сооСно с шарниром голени и жестко присоединено к последней, отличающаяся тем, что, с целью исключения влияния поворота бедра в вертикальной плоскости на угол между ним и голенью, корпус привода поворота голени жестко прикреплен к горизонтальному валу бедра: . ,--.-..-.-..-. Источники информации, принятые во внимание при экспертизе 1.Вукобратович М. Шагающие роботы и антропоморфные механизмы. М., «Мир, 1976, с. 437, рис.. 3.42. 2.Авторское свидетельство СССР по заявке NO 2364932/11, кл. В 62 Ь 57/02, 26.05.1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора шагающего транспортного средства | 1976 |
|
SU716898A1 |
| Шагающая опора транспортного средства | 1980 |
|
SU933533A1 |
| Опора шагающей машины | 1977 |
|
SU751701A1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Нога шагающего аппарата | 2018 |
|
RU2709945C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы | 2024 |
|
RU2830990C1 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |