Изобретение относится к сельскохозяйственно.му машиностроению, а именно к устройствам автоматического управления положением рабочих органов иочвообрабатывающих машин в пространстве.
Известны устройства для автоматической продольно-поперечной стабилизации положения рабочих органов, содержащее поворотную в продольно-вертикальной плоскости трактора раму, на которой подвижно установлен поворотный в поперечно-вертикальной плоскости трактора элемент механизма навески рабочих органов, гидравлический привод рабочих органов и гидроавтоматические стабилизаторы с маятниковым датчиком.
Однако такие устройства не обеспечивают автоматической стабилизации заданного углового положения рабочих органов машины относительно вертикали продольно- и поперечио-вертикальной плоскостей трактора, что необходимо для одновременной подготовки террас с заданным уклоном опорной поверхности и бокового откоса.
Целью изобретения является создание устройства, обеопечиваюшего возможность автоматической стабилизации углового положения рабочих органов машины относительно вертикали в двух взаимно перпендикулярных плоскостях: лродольно- и поперечно-вертикальной плоскостях трактора.
Это достигается тем, что в предлагаемом устройстве к поворотной в продольно-вертикальной плоскости раме шарнирно подвешены два корпуса гидроавтоматических стабилизаторов и продольной и поперечной устойчивости с маятниковыми датчика.ми таким образом, что плоскости качания маятников расположены: у первого в продольно-вертикальной, а у второго в поперечно-вертикальной плоскости, причем корпус гидроавтоматического стабилизатора поперечной устойчивости .через систему рычагов обратной связи шарнирно соединел с поворотным в поперечно-вертикальной нлоскости трактора элементов механизма навески рабочих органов, а для установки корпусов гидроавтоматических стабилизаторов в заданном положении имеются шарнирно-винтовые соединения.
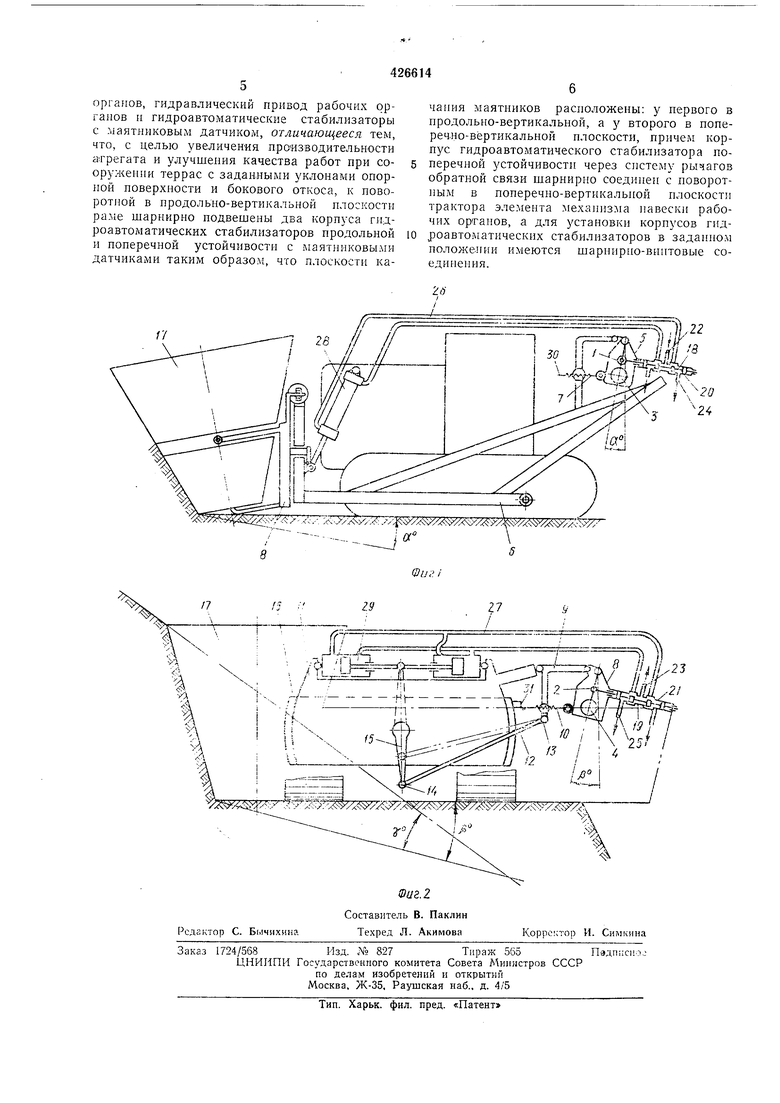
На фиг. 1 изображена схема предлагаемого устройства для автоматической иродольно-поперечпой стабилизации положе 1ия рабочих органов, вид сбоку; на фи1Г. 2 - то же, вид сзади.
Устройство состоит из двух самостоятель
ных гидроавтоматических стабилизаторов / и
2с маятниковыми датчиками, один из которых - авто.мат продольной стабилизации /- размещается с плоскостью Качания маятника
3в продольно-вертикальной плоскости трактора, а второй - автомат поперечной стаби -«д«, - -1ц-э#...,
, Н.аЖгвй.. t г|
лизации 2 - размещается с плоскостью качания маятника 4 з поперечно-вертикальной ПЛОСКОСТР1 трактора.
Соединение корпусов гидроавтоматическнх стабилизаторов с элемеита.ми механизма навески рабочего органа может осзществляться из двух способов, изображенных на фиГ. 1 и фиг. 2.
Корпус 5 гидроавтоматического стабилизатора (фиг. }) шарнирно подвешен к раме 6 Л1еханизма навески rpaiKTOipa, причем для фиксации его в заданном положении ол промежуточно соединен с рамой 6 механизма навески шарнирно-винтовым звеном 7.
Корпус 8 гидроавтоматического стабилизатора (фиг. 2) шарнирно подвешен на специальном кронштейне 9 обратной связи и промежуточно соединен с ним шарнирио-виитовым звеном 10. Кронштейн 9 одним ;концол шарнирно подвешен на поперечине // рамы 6 механизма навески, а вторым концом через тягу 12 обратной связи с шарнирами 13 и 14 соединен с рычагом 15 обратной связи, установленным на подвижном в поперечно-вертикальной плоскости трактора элементе 16 рамы павески рабочего оргапа 17. Перестаповкой шарнира 14 вдоль рычага 15 изменяется передаточное отношение обратной связи устройства стабилизации, тем самым изменяется его чувствительность к отклонениям рабочих органов от заданного положения относительно вертикали.
Маятниковые датчики (маятники) 3 и 4 шарнирно связаны с золотниками 18 и 19 гид рораспределителей 20 и 21, которые соответственно через нагнетательные 22 и 25 и сливные 24 и 25 трубопроводы сообщаются с гидравлической системой трактора, а через трубопроводы 26 и 27 - с полостями гидроцилиндра 28 продольной и тидроцилиндра 29 поперечной стабилизации, которые осуществляют автоматическое относительное перемещение взаимно подвижных элементов механизма навески рабочего органа относительно трактора в продольно-вертикальной и поперечно-вертикальной плоскостях в зависимости от изменения продольного н поперечного уклона скло.на (рельефа местности).
Предлагаемое устройство для автоматической продольно-поперечной стабилизации положения рабочих органов работает следующим образом.
Перед началом работы агрегата устанавливается заданный продольный и поперечный наклон рабочего органа относительно вертикали путем соответствующего углового поворота корпусов 5 и S гидроавтоматических стабилизаторов регулировочными винтами с помощью рукояток 30 и 31 на заданный угол относительно их нулевого положения, за которое принято вертикальное положение линии симметрии корпусов маятников гидроавтоматических (стаб.илизаторов (совпадающее с центром тяжести маятников 3 и 4) при условии совпадения линии нпжней режущей
K 426614
кромки рабочего оргапа с опорной поверхностью трактора, являющейся по существу началом шкалы отсчета углов а и р.
При .наклоне корпусов 5 и S гидроавтоматических стабилизаторов гидрораспределители 20 н 21 смещаются относительно золотников 18 и 19, щарнирно сое,диненных с маятниками 3 и 4, сообщая тем самым нагнетательные 22 и 23 и сливные 24 и 25 трубопроводы через соответствующие трубопроводы 26 и 27 с соответствующими полостями гидроцилиндров 28 и 29. Под действием рабочей жидкости штоки гидроцилиндров 28 и 29 поворачивают подвижную в продольно-вертикальной плоскости трактора раму 6 механизма навески и подвижный в поперечно-вертикальной плоскости элемент 16 рамы навески рабочего органа 17 до требуемого углового положения рабочего органа в пространстве. По достижении корпусами маятниковых датчиков 1:идроавтоматических стабилизаторов вертикального положения их нулевых линий золотники 18 п 19 занимают нейтральное положение в корпусах соответствующих гидрораспределителей 20 и 21, и подача рабочей жидкости в гидроцилиндры прекращается. ,По мере появления углового рассогласования между нулевыми линиями корпусов маятниковых датчиков гидроавтоматических стабилизаторов и вертикалью маятников в ходе работы агрегата (т. е. при смещении рабочего органа от заданного углового положения относительно вертикали) золотники соответствующих автоматов-стабилизаторов будут подключать соответствующие магистрали гидроцилиндров управления с нагнетательными и сливными магистралями гидросистемы, отслеживать вертикаль маятников н сохранять заданное угловое положение рабочего органа в пространстве относительно вертикали, независимо от того, на каком косогоре стоит трактор.
Работа устройства с механизмом обратной связи (фиг. 2) заключается в том, что в зависимости от соотношения плеч рычага 15 обратной связи устройство может быть настроено па необходимую степень чувствительности автоматического приведения рабочего органа в заданное положение в пространстве относительно вертикали.
Для .настройки устройства на более грубую чувствительность тяга 12 обратной связи соединяется шарниром 14 на рычаге 15 обратной связи на более коротком плече, а для настройки на более тонкую чувствительность - наоборот.
Предмет изобретения
Устройство для автоматической продоль60 но-поперечной стабилизации положения рабочих opraiiOB, содержащее поворотную в продольно-вертикальной плоскости трактора раму, на которой подвижно установлен поворотный в поперечно-вертикальной плоскости 65 .трактора элемент механизма навески рабочих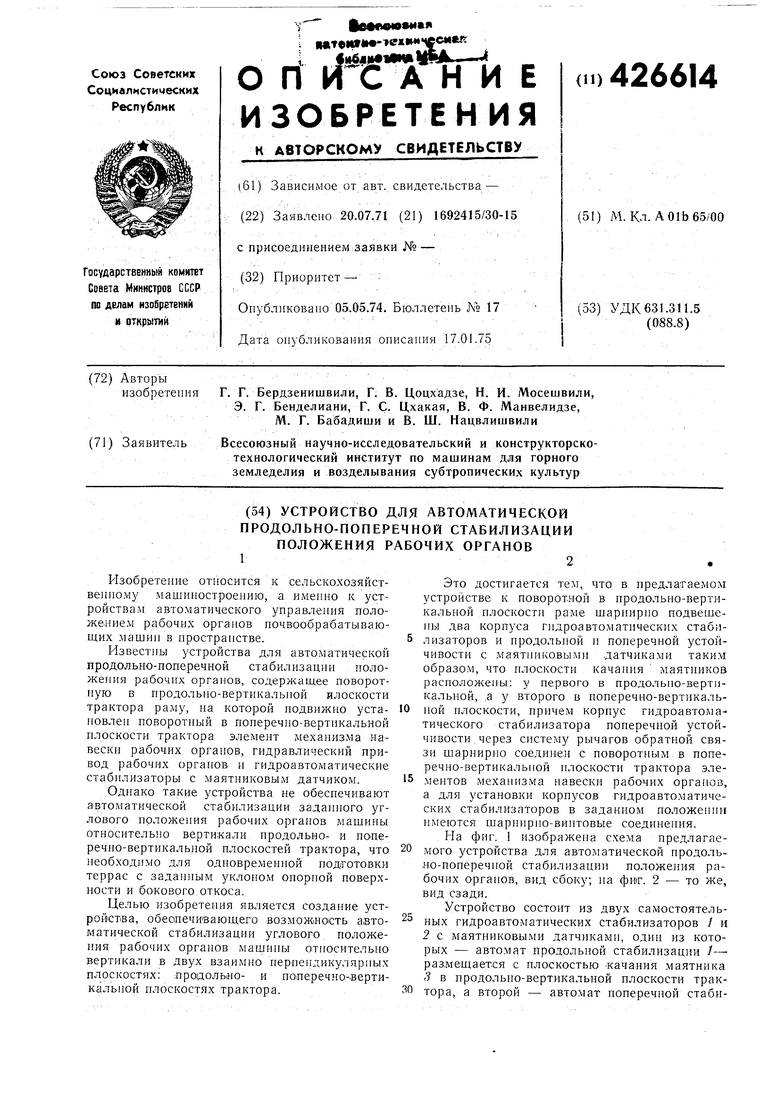
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ НАВЕСКИ РАБОЧИХ ОРГАНОВ ТЕРРАСЕРА | 1973 |
|
SU389215A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДАТЧИКА СИГНАЛА РАССОГЛАСОВАНИЯ | 2001 |
|
RU2202160C2 |
| Крутосклонный трактор | 1975 |
|
SU572396A1 |
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| ТРАКТОРНЫЙ НАВЕСНОЙ ОБОРОТНЫЙ ПЛУГ ДЛЯ ГЛАДКОЙ ПАХОТЫ | 1995 |
|
RU2084090C1 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| Гидромеханическая система стабилизации положения рабочего органа планировочной машины | 1983 |
|
SU1164375A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2433224C1 |
| Пропашной трактор для работы на склонах | 1987 |
|
SU1518151A1 |