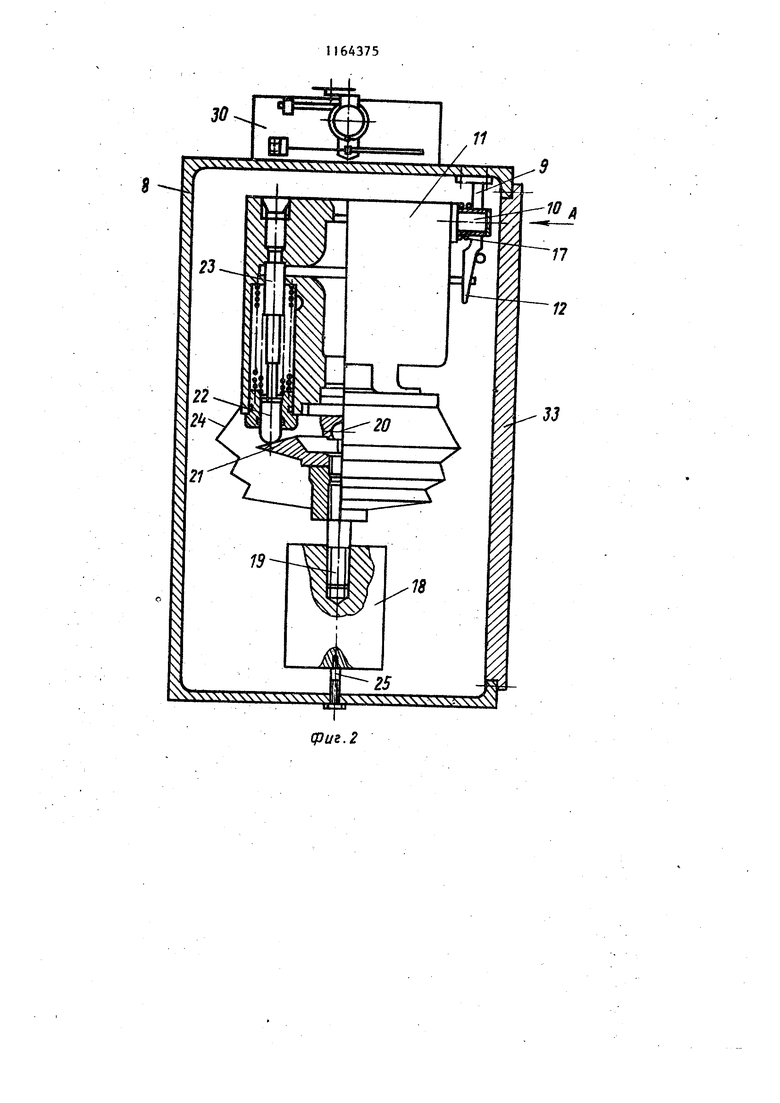
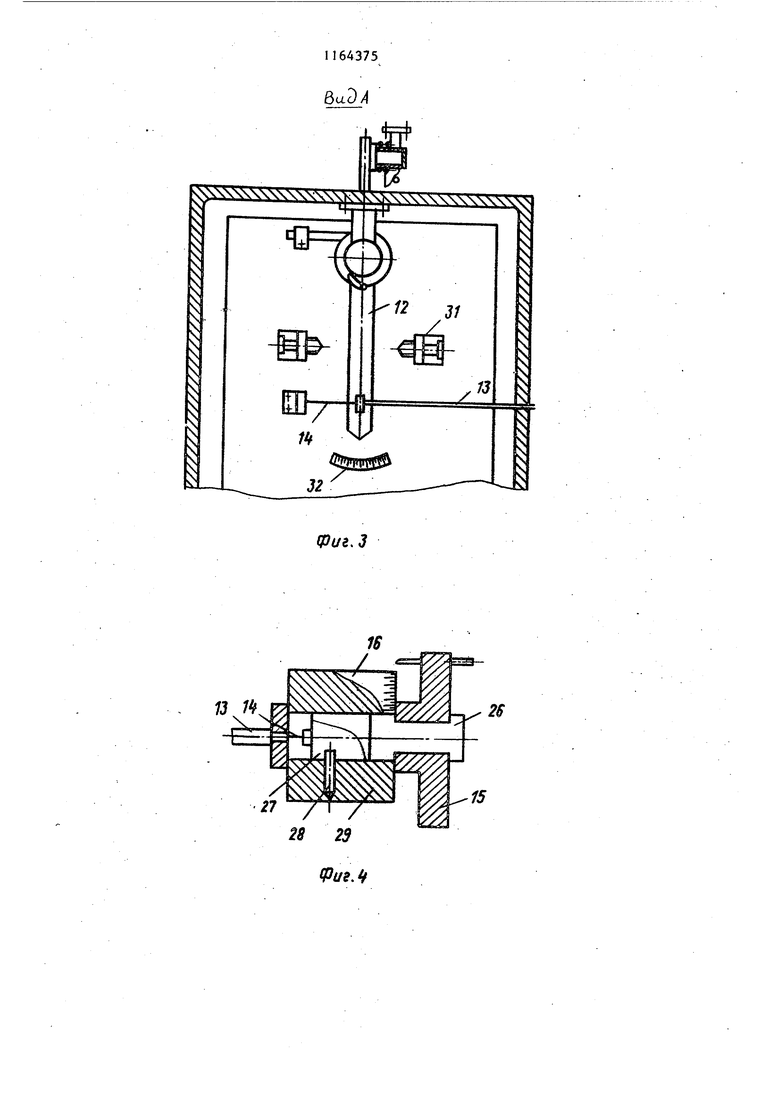
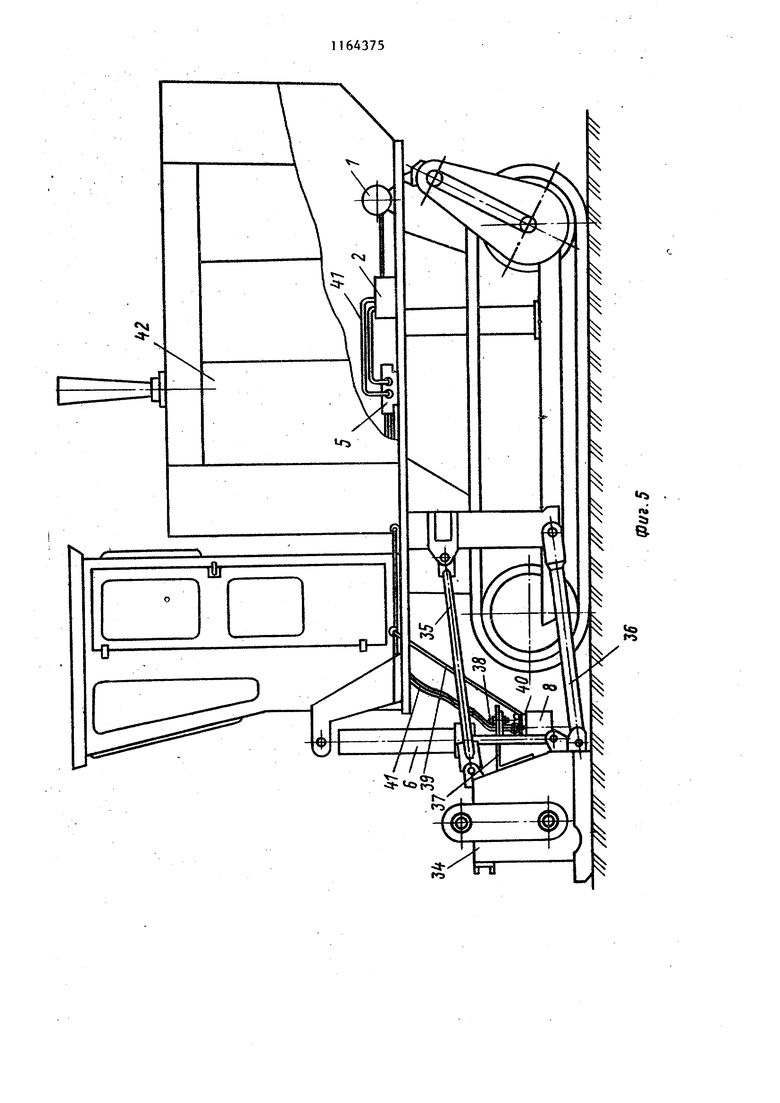
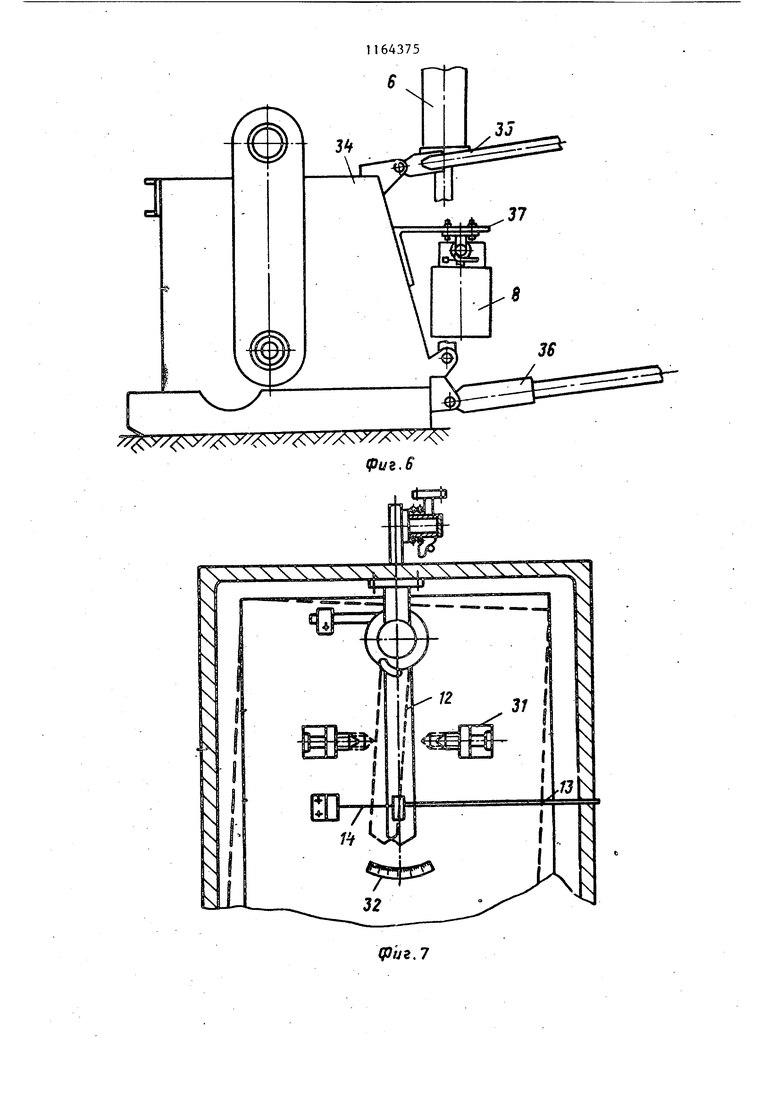
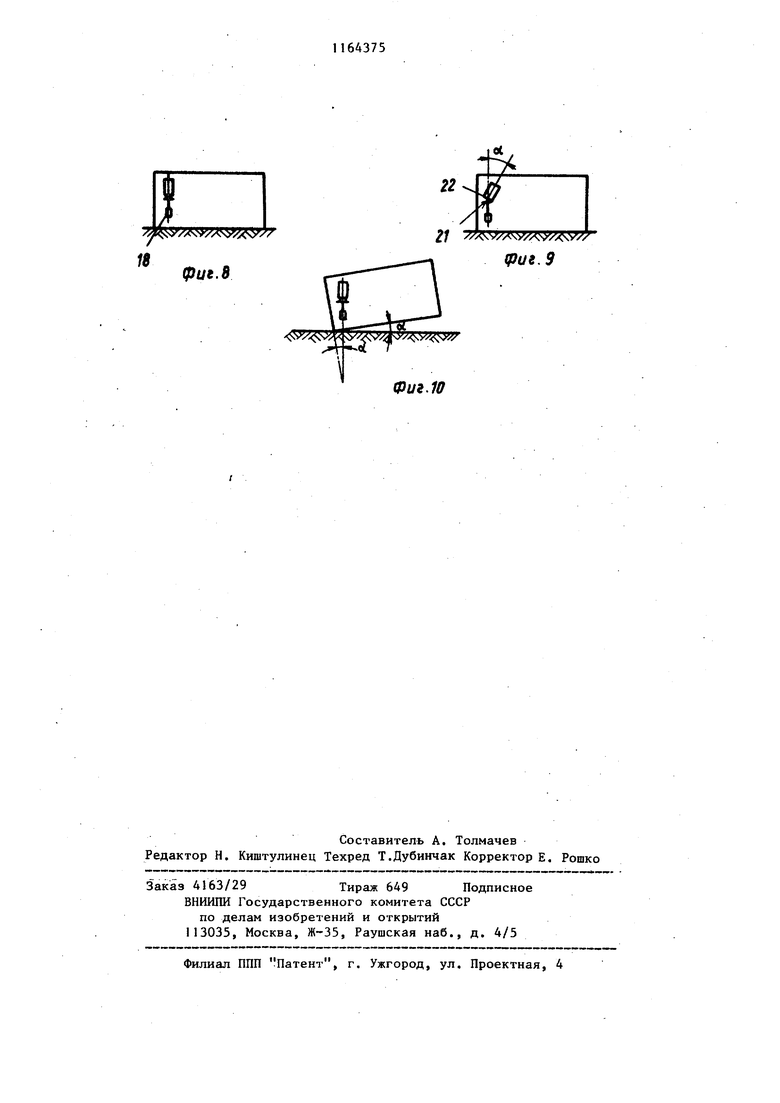
« Изобретение относится к строитель но-дорожным машинам, а именно к сист ме автоматического управления рабочи органом. Наиболее близкой к предлагаемой п технической сущности и достигаемому результату является гидромеханическа система стабилизации положения рабоч го, органа планировочной машины, вклю чающая гидроцилиндр управления с гид рораспределитедем, силовую насосную установку, закрепленный корпусом на рабочем органе маятниковый датчик и узел задания наклона .рабочего органа в поперечной плоскости LI J. Недостатками указанной системы являются нестабильность расходной х рактеристики с изменением температур жидкости, повьшенные потери энергии на дросселирование возможности отсле живать положение рабочего органа тол ко в поперечной вертикальной плоскос ти, что в результате приводит к недостаточной .точности стабилизации положения рабочего органа. Цель изобретения - повышение точности стабилизации положения рабочего органа. Указанная цель достигается тем, что гидромеханическая система стабилизации положения рабочего органа планировочной машины, включающая гидроцилиндр управления с гидрораспределителем, силовую насосную уста новку, закрепленный корпусом на рабочем органе маятниковый датчик и узел задания наклона рабочего орган в поперечной плоскости, снабжена гидроаккумуляторчым блоком, соединенным с последним и с гидрораспределителем блоком управления с редук ционными клапанами, тарельчатой шайбой и управляющим рычагом, на котором закреплен маятник, и соединенный с корпусом маятникового датчика узлом задания угла наклона рабочего органа в продольной плоскости. На фиг.1 изображена принципиальная схема ги.гпомеханической систе 4ы стабилизации положения рабочего органа планировочной машины; на фиг.2 маятниковый датчик системы стабилизации; на фиг.З - вид А на фиг.2; на фиг. 4 - узел задания угла накло на рабочего органа; на фиг. 5 - пла нировочная машина, вид сборку; на фиг.6 - рабочий орган планировочной 5 машины с корпусом маятникового датчика; на фиг. 7 - схематично срабатывание маятникового датчика при переносе рабочего органа; на фиг.З 10- схематично установка требуемых угловых положений рабочего органа. Гидромеханическая система стабилизации включает силовую насосную установку 1, гидропневмоаккумуляторный блок 2, редукционные клапаны 3, которые соединены с маятниковым датчиком 4, находящимся на рабочем органе, машины. Редукционные клапаны 3 связаны с гидрораспределителем 5 пропорционального действия, которьй соединен с гидроцилиндрами 6. Гидрозамок 7расположен между гидроцилиндром 6 и гидрораспределителем 5. К корпусу 8маятникового датчика 4 с помощью узла 9 крепления, и оси 10, проходящей через втулку узла 9 крепления, прикреплен.блок II редукционных клапанов. К узлу 9 крепления ж-естко прикреплен рычаг- указатель 12, на котором закреплена оплетка 13 тросика 14, связывающего блок редукционных клапанов М с маховиком 5 задания угла, снабженным шкапой 16 и установленным в кабине планировочной машины. Рычаг-указатель 12 ..связан с блоком 11 редукционных клапанов посредством спиральной П15УЖИНЫ 17. Блок 1 1 редукционных клапанов состоит из маятника 18, который соединен с управляющим рычагом 19, закрепленным в блоке 1.1 редукционных клапанов I 1 при помощи шарнира 20.,, Тарелка 21 соединена с рычагом 19, а толкатель 22 с тарелкой 21. Золотник 23, находящийся в корпусе -блока 1I редукционных клапанов, соединен с толкателем 22. Для герметизации блока он закрыт чехлом 24. li нижней части корпуса 8 маятникового датчика 4 находится стопорный винт 25. Маховик 15 задания угла связан с осью 26, которая соединена с тросиком 14 с помощью винтовой пары. Ось 26 имеет паз 27, в который входит штифт 28, находящийся в опоре 29. Корпус 8 маятникового датчика 4 жестко соединен с узлом задания продольного угла наклона рабочего органа 30, выполненного аналогично узлу задания угла наклона рабочего органа в поперечной плоскости. Регулировочные вин.ты j i и шкала 32 находятся на корпусе блока 1I редукционных клапанов и служат для установки и.фиксации заданного углового положения в случае длительной работы при постоянном угле наклона рабочего органа. Съёмная крьшка 33 прикреплена к корпусу 8 маятникового датчика 4. Рабочий орган 34 прикреплен к .базовой машине при помощи верхних 35 и нижних 36 тяг. Гидроцилиндр 6 расположен в передней части машины, К рабочему органу 34 прикреплен кронштейн 37, к которому при помощи болто 38 прикреплен корпус 8 маятникового датчика 4, Тросик 39 соединен с корпусом 8 через направляющий блок 40, Блок I1 редукционных клапанов соединен с основными элементами гидромеханической системы стабилизации при помощи трубопроводов 41, Слева по хо ду движения машины под силовой установкой 42 расположена силовая насосная установка 1, гидропневмоаккумуляторный блок 2, гидрораспределитель 5 пропорционального действия. Система работает следующим образо При разработке грунта необходимо обеспечивать определенную степень точности планировки земляного полотна. Во время рабочего процесса рабочий орган планировочной машины имеет возможность перемещения как в продольной, так и в поперечной вертикальной плоскости. При этом маятник 18, сохраняя неизменным свое положение относительно горизонтальной плос кости, действует на тарелку 21, находящуюся в соединении с рычагом 19, которая нажимает на толкатель 22. Толкатель 22 включает золотник 23 (работакиций по принципу редукционного клапана), благодаря которому редукцированное давление жидкости, поступаищей в торцовые полости гидро распределителя 5, позволяет перемещать плунжер вправо или влево на величину, пропорциональную величине давления, а следовательно, углу поворота маятникового датчика 4 относительно корпуса 8, Гидрораспределитель 5 с помощью гидроцилиндров 6 восстанавливает положение рабочего органа планировочной машины относительно горизонтальной плоскости. Таким образом, управляющий сигнал вьфабатываемый маятниковым датчиком 4 системы стабилизации угла наклона рабочего органа, позволяет с помощью 1 75 гидрораспределителя 5 направить рабочую жидкость в одну из двух полостей гидроцилиндра 6 (в зависимости от знака управляющего сигнала) и вернуть рабочий орган в исходное положение относительно горизонтальной плоско- сти, В случае, когда рабочий орган 34 находится в положении, параллельном горизонтальной плоскости, срабатывания датчика не происходит (фиг, 8), Маятник 18 находится в вертикальном положении, тарелка 21 не воздействует на толкатель 22, гидрораспределитель 5 пропорционального действия находится в нейтральном положении, гидроцилиндр 6 задания угла перекоса рабочего органа планировочной машины не срабатывает. При работе с постоянным углом перекоса осуществляют наклон блока 11 редукционных клапанов (фиг,9). В этом случае маятник 18 на шаро. вом шарнире 20, сохраняя вертикальное положение относительно горизонтальной плоскости, через рычаг .19 и тарелку 21 воздействует на толкатель 22.Толкатель 22 перемещает золотник 23,тем самым приводя в рабочее состояние один из редукционных клапанов 3, При этом рабочая жидкость, поступая в торцовые полости гидрораспределите ля 5 пропорционального действия, перемещает его золотник. Рабочая жидкость поступает в штоковую или поршневую полость гидроцилиндра 6 задания угла перекоса рабочего органа. Происходит подъем или опускание рабочего органа 34 планировочной машины до заданного угли перекоса d. (фиг,9), Срабатьшание маятникового датчика происходит до тех пор, пока рабочий орган не займет требуемое положение, согласно углу перекоса of, задаваемому наклоном блока 11 редукционных клапанов. Когда рабочий орган 34 займет заданное положение (фи.10) оси симметрии блока 11 редукционных клапанов 1I и маятника 18 полностью совпадут. В этом случае произойдет отключение редукционного клапана 3, так как тарелка 21 не будет воздействовать а толкатель 22, При возмущающем воздействии на абочий орган 34 со стороны разрабаываемого грунта происходит выведеие системы из положения равновесия. включаются редукционные клапаны 3 и гидроцилиндр 6 задания угла перекоса рабочего органа возвращает рабочий орган 34 в исходное положение относи тельно горизонтальной плоскости. Поскольку блок 1I редукционных клапанов имеет четыре толкателя 22, работающих в двух взаимно перпендикулярных плоскостях, гидромеханическая система стабилизации позволяет отслеживать угол наклона рабочего органа планировочной машины как в продольной, так и поперечной вертикальной плоскости, позволяя своевременно возвращать рабочий орган в исходное положение, благодаря рабочему циклу маятникового датчика, описанно му выше. Установка требуемого углово го положения рабочего органа относительно горизонтальной плоскости при перекосе рабочего органа в поперечно вертикальной плоскости производится вращением маховика 15 задания угла в соответствие с показаниями шкалы 16. Блок 11 редукционных клапанов, поворачиваясь вокруг оси 26 по часовой стрелке под действием пружины 17, а в другую сторону за счет натяжения тросика 14, выводит систему стабилизации из положения -равновесия. Включаясь, гидроцилиндры поворачи вают рабочий орган и систему стабилизации в устойчивое положение. Рабочий орган при этом занимает новое угловое положение. Установка требуемого углового положения рабочего органа в продольной плоскости производится аналогичным узлом задания угла наклона в той же последовательности из кабины планировочной машины. Ревулировочные винты 31 служат дл установки и фиксации заданного углового положения в случае длительной работы при постоянном угле наклона. При кратковременной работе изменение угла наклона осуществляется из кабины оператора при помоош маховика J5 задания угла и тросика 14. Задание угла наклона рабочего органа 34 осуществляется путем наклона блока 1I редукционных клапанов или корпуса 8. (в ёависимости от того в поперечной или продольной плоскостях происходит перекос рабочего органа) в одну сторону при помощи тросика 14, в другую за счет натяжения пружины 17. При любом перекосе рабочего органа маятник стремится занять вертикальное положение относительно горизонтальной плоскости. Стопорный винт 25 установлен для того, чтобы обеспечить неподвижность маятника и всей системы в цалом в транспортном режиме машины. Гидропневмоаккумуляторный блок 2 предназначен для создания давления в гидролинии управления золотником : гидрораспределителя 5 пропорционального действия. Наличие гидропневмоаккумуляторного блока 2 в системе стабилизации обусловлено тем, что давление в гидравлической системе планировочной машины составляет 20 МПа, а рабочий диапазон блока 11 редукционных клапанов 4 МПа, поэтому работа клапанов невозможна без гидропневмоаккумуляторного блока, позволяющего получить требуемой диапазон рабочего давления. Кроне того, при аварийных поломка, как или отказе двигателя гидропневмоаккумуляторный блок 2 позволяет произвести несколько переключений гидрораспределителя 5 пропорционального действия, т.е. опустить рабочий орган 34 планировочной машины. Введение в систему блока редукционных клапанов позволяет получить постоянное редуцированное давление рабочей жидкости, а соединение узла задания угла наклона рабочего органа с корпусом маятникового дат:ика позволяет получить возможность срабатывания датчика в продольной плоскости J что в целом ведет к повьш1еншо точности стабилизации положения рабочего органа.
li
ч
т
О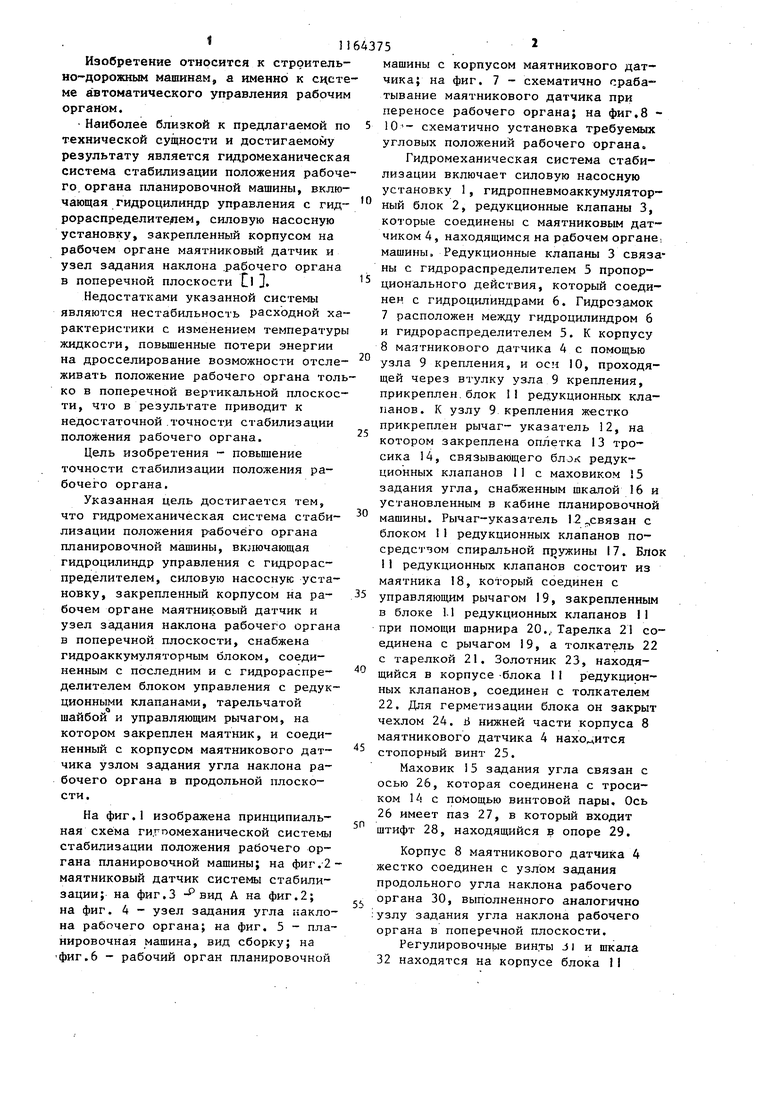
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации положения рабочего органа дорожностроительной машины | 1984 |
|
SU1203207A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2422594C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2433224C1 |
| Гидромеханическая система стабилизации положения отвала автогрейдера в поперечной плоскости | 1979 |
|
SU891867A1 |
| Гидромеханическая система управления отвала бульдозера | 1981 |
|
SU1094917A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| Гидравлическая система стабилизации угла наклона отвала автогрейдера в поперечной плоскости | 1977 |
|
SU866075A1 |
| Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины | 1983 |
|
SU1148949A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙПРОДОЛЬНО-ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ12 | 1971 |
|
SU426614A1 |
ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ, включающая гидроцилиндры управления с гидрораспределителем, силовую насосную установку, закрепленный корпусом на рабочем органе маятниковый датчик и узел задания наклона рабочего органа в поперечной плоскости, о т л и ч а- ю щ а я с я тем, что, с целью повышения точности стабилизации положения рабочего органа, она снабжена гидроаккумуляторным блоком, соединенным с последним и с гидрораспределителем блоком управления с редукционными клапанами, тарельчатой шайбой и (Л управляюпщм рычагом, на котором закреплен маятник, и соединенным с корпусом маятникового датчика узлом задания угла наклона рабочего органа в продольной плоскости. 4 00 J СП
il
Q1
.J
дО
(риг. 2
13 1
п
28
(pt/g.
фиг. 6
/а
фиг. в
1риг.9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидромеханическая система стабилизации положения отвала автогрейдера в поперечной плоскости | 1979 |
|
SU891867A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
