(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТНОГО ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА СТРОИТЕЛЬНЫХ И ДОРОЖНЫХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Гидравлический демпфер для маятниковой подвески датчика положения рабочего органа землеройной машины | 1984 |
|
SU1173014A2 |
| Устройство управления положением рабочего органа землеройно-транспортной машины | 1989 |
|
SU1647091A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Способ управления положением рабочего органа землеройной машины | 1982 |
|
SU1105576A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПЛАНИРУЮЩЕЙ СПОСОБНОСТИ ПЛАНИРОВОЧНЫХ МАШИН | 2010 |
|
RU2417286C1 |

I
Изобретение относится к строительному и дорожному машиностроению, а именно к устройствам автоматического управления высотным положением рабочего Органа строительных и дорожных машин, в частности дреноукладчика, с целью выдерживания заданной глубины копания.
Известно устройство, предназначенное для автоматического управления цепным рабочим органом экскаватора по лучу лазера. Устройство имеет фотоприемник, установленный на стойке, нижний конец которой может перемещаться в пазах рамы рабочего органа по определенному закону. Для компенсации погрешностей, возникающих при наклонах рабрчего органа, устройство снабжено маятником, который при наклонах рабочего органа за счет собственного веса перемещает стойку с фотоприемником в пазах рамы, благодаря чему происходит компенсация погрешности 1.
Недостатком устройства является ограниченная чувствительность компенсатора погрешности данного устройства к наклонам рабочего органа вследствие неизбежного застоя маятника вблизи положения равновесия из-за трения в пазах стойки о раму.
Известен также компенсатор погрешности устройства для измерения положения рабочего органа 2.
Назначение и конструкция данного устройства аналогичны описанному выше. Отличие состоит в том, что для перемещения стойки в пазах рамы используется гидроцилиндр, который включается по сигналу датчика углового положения стойки относительно вертикали. Помимо усложнения конструкции, недостатком устройства является то, что в момент срабатывания гидроцилиндра возможно раскачивание датчика угла, и как следствие - возникновение автоколебаний в контуре стабилизации углового положения стрйки. Для исключения автоколебаний необходимо увеличение зоны чувствительности датчика угла, что, очевидно, увеличивает ошибку компенсатора погрешности. Кроме того, на величину ошибки в этом случае неизбежно сказывается инерционность гидропривода и запаздывание в элементах системы угловой стабилиза20 ции стойки.
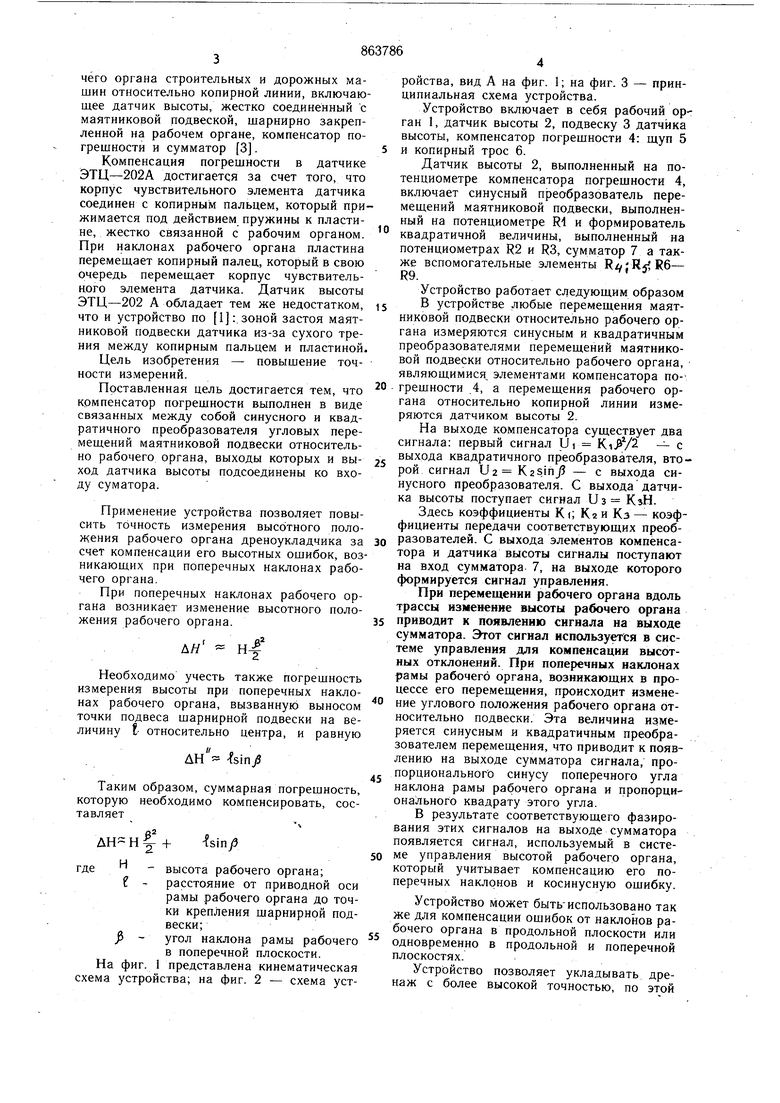
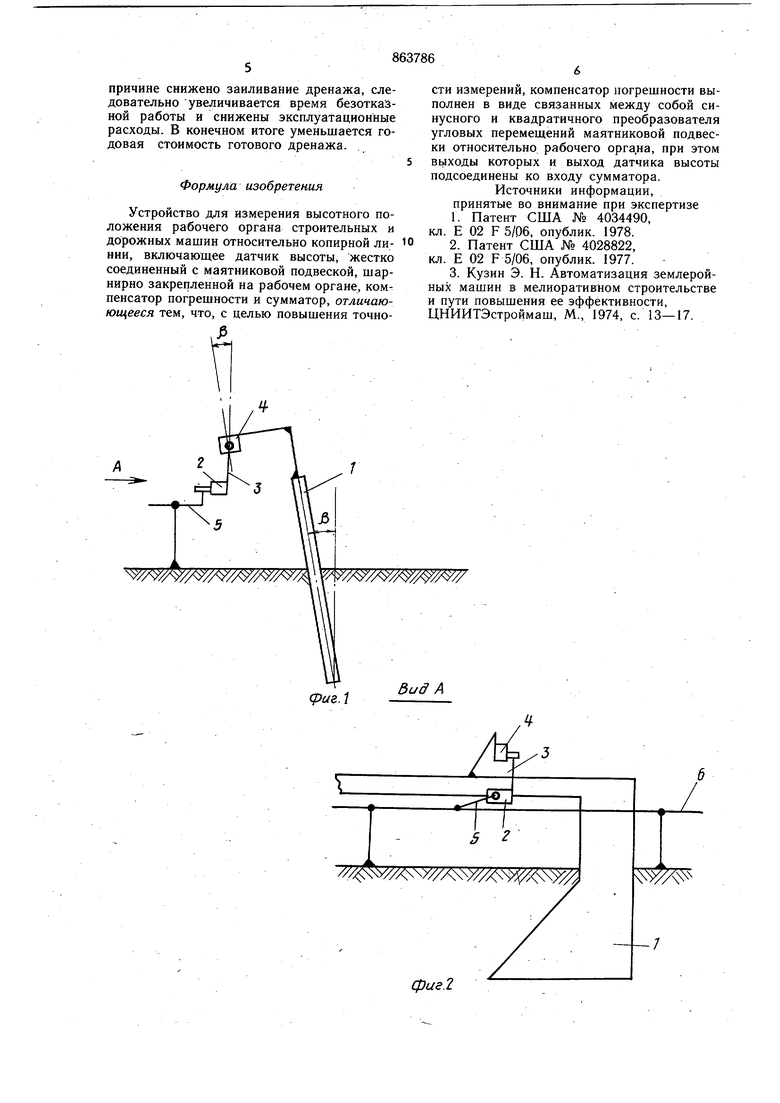
Наиболее близким по технической сущности к изобретению является устройство для измерения высотного положения рабочего органа строительных и дорожных машин относительно копирной линии, включающее датчик высоты, жестко соединенный с маятниковой подвеской, шарнирно закрепленной на рабочем органе, компенсатор погрешности и сумматор 3. Компенсация погрешности в датчике ЭТЦ-202А достигается за счет того, что корпус чувствительного элемента датчика соединен с копирным пальцем, который прижимается под действием пружины к пластине, жестко связанной с рабочим органом. При наклонах рабочего органа пластина перемешает копирный палец, который в свою очередь перемеш,ает корпус чувствительного элемента датчика. Датчик высоты ЭТЦ-202 А обладает тем же недостатком, что и устройство по . зоной застоя маятниковой подвески датчика из-за сухого трения между копирным пальцем и пластиной. Цель изобретения - повышение точности измерений. Цоставленная цель достигается тем, что компенсатор погрешности выполнен в виде связанных между собой синусного и квадратичного преобразователя угловых перемещений маятниковой подвески относительно рабочего органа, выходы которых и выход датчика высоты подсоединены ко входу суматора. Применение устройства позволяет повысить точность измерения высЬтного положения рабочего органа дреноукладчика за счет компенсации его высотных ошибок, воз никающих при поперечных наклонах рабочего органа. При поперечных наклонах рабочего органа возникает изменение высотного положения рабочего органа. дя Необходимо учесть также погрешность измерения высоты при поперечных наклонах рабочего органа, вызванную выносом точки подвеса шарнирной подвески на величину относительно центра, и равную sinj3 Таким образом, суммарная погрешность, которую необходимо компенсировать, составляетДН- Н + высота рабочего органа; расстояние от приводной оси рамы рабочего органа до точки крепления шарнирной подвески;Р угол наклона рамы рабочего в поперечной плоскости. На фиг. 1 представлена кинематическая схема устройства; на фиг. 2 - схема устройства, вид А на фиг. ; на фиг. 3 - принципиальная схема устройства. Устройство включает в себя рабочий орган 1, датчик высоты 2, подвеску 3 датчика высоты, компенсатор погрешности 4: щуп 5 и копирный трос 6. Датчик высоты 2, выполненный на потенциометре компенсатора погрешности 4, включает синусный преобразователь перемещений маятниковой подвески, выполненный на потенциометре R1 и формирователь квадратичной величины, выполненный на потенциометрах R2 и R3, сумматор 7 а также вспомогательные элементы R/yjR R6- R9. Устройство работает следующим образом В устройстве любые перемещения маятниковой подвески относительно рабочего органа измеряются синусным и квадратичным преобразователями перемещений маятниковой подвески относительно рабочего органа, являющимися, элементами компенсатора по-грешности 4, а перемещения рабочего органа относительно копирной линии измеряются датчиком высоты 2. На выходе компенсатора существует два сигнала: первый сигнал 0) - с выхода квадратичного преобразователя, второй сигнал и2 K2sin - с выхода синусного преобразователя. С выхода датчика высоты поступает сигнал U3 КзН. Здесь коэффициенты Ki; Кг и Кз - коэффициенты передачи соответствующих преобразователей. С выхода элементов компенсатора и датчика высоты сигналы поступают на вход сумматора 7, на выходе которого формируется сигнал управления. При перемещении рабочего органа вдоль трассы изменение высоты рабочего органа приводит к появлеиию сигнала на выходе сумматора. Этот сигнал используется в системе управления для компенсации высотных отклонений. При поперечных иаклонах рамы рабочего органа, возникающих в процессе его перемещения, происходит изменение углового положения рабочего органа относительно подвески. Эта велнчина измеряется синусным и квадратичным преобразователем перемещения, что приводит к появлению на выходе сумматора сигнала, пропорционального синусу поперечного угла наклона рамы рабочего органа и пропорционального квадрату этого угла. В результате соответствующего фазирования этих сигналов на выходе сумматора появляется сигнал, используемый в системе управления высотой рабочего органа, который учитывает компенсацию его поперечных наклонов и косинусную ощибку. Устройство может быть-использовано так же для компенсации ошибок от наклонов рабочего органа в продольной плоскости или одновременно в продольной и поперечной плоскостях. Устройство позволяет укладывать дренаж с более высокой точностью, по этой
причине снижено заиливание дренажа, следовательно увеличивается время безотказной работы и снижены эксплуафационные расходы. В конечном итоге уменьшается годовая стоимость готового дренажа. ,
Формула изобретения
Устройство для измерения высотного положения рабочего органа строительных и дорожных машин относительно копиркой лиНИИ, включающее датчик высоты, жестко соединенный с маятниковой подвеской, шарнирно закрепленной на рабочем органе, компенсатор погрешности и сумматор, отличаюющееся тем, что, с целью повышения точно- // / // //У// /
(раеЛ
сти измерений, компенсатор погрешности выполнен в виде связанных между собой синусного и квадратичного преобразователя угловых перемещений маятниковой подвески относительно, рабочего органа, при этом выходы которых и выход датчика высоты подсоединены ко входу сумматора. Источники информации, принятые во внимание при экспертизе
бид А
фаг 2
