1
Изобретение относится к области автоматического регулирования и может быть использовано в сглаживающих устройствах, а также в системах стабилизации, содержащих объект регулирования с резонансными свойствами на частоте, близкой к частотам основного низкочастотного движения.
Известен нелинейный фильтр низкой частоты, содержащий элемент сравнения, входы которого соединены с двумя фазосдвигающими цепями, корректирующий контур, звено типа антивибратор, связанное с одной из фазосдвигающих ценей, и инерционное звено, вход которого подключен ко входной клемме фильтра и входу звена типа антивибратор, а выход подключен к корректирующему контуру и входу второй фазосдвигающей цепи.
Однако независимо от выбора передаточных функций корректирующие свойства данного устройства резко ухудшаются, если входной сигнал состоит из суммы полезной и колебательной (нОлМехи) составляющих, причем последнюю необходимо отфильтровать.
Цель изобретения - новыщение точности выделения полезной составляющей в условиях, близких частоте полезного сигнала и помехе высокого уровня.
Предлагаемый фильтр низкой частоты отличается тем, что он содержит запоминаюн1,ий элемент н логический переключающий элемент, через который выход корректирующего контура соединен с запоминающим элементом и управляющий вход которого соединен с выходом элемента сравнения.
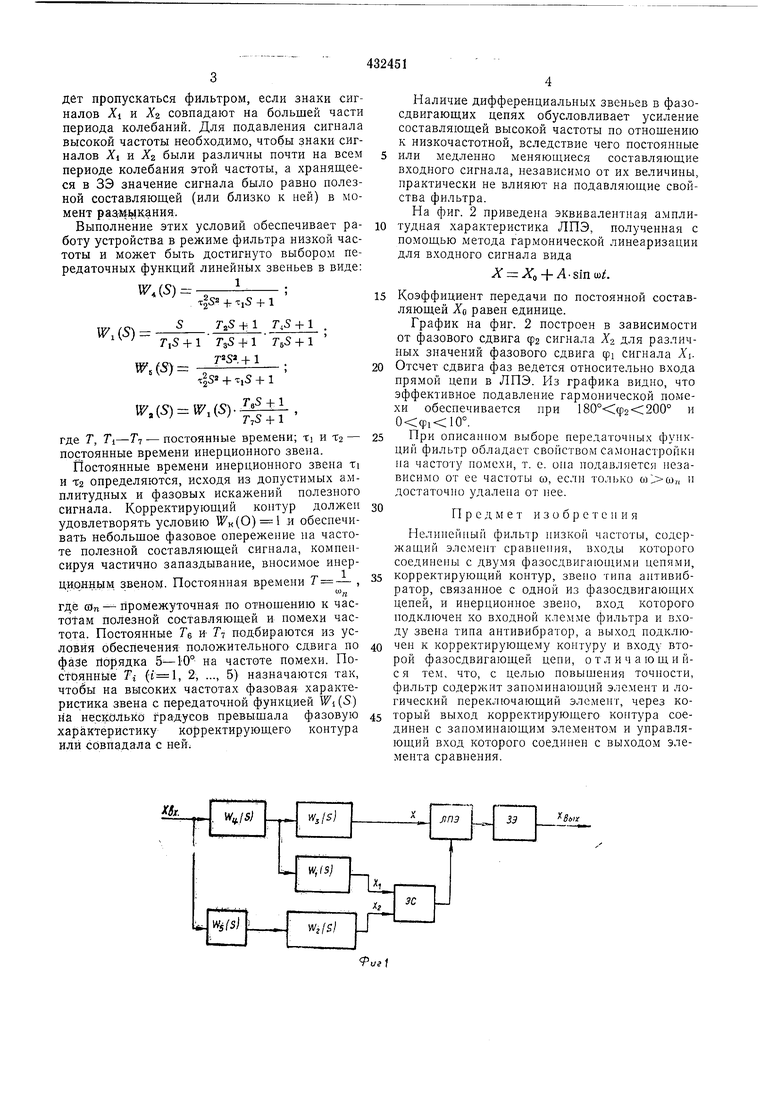
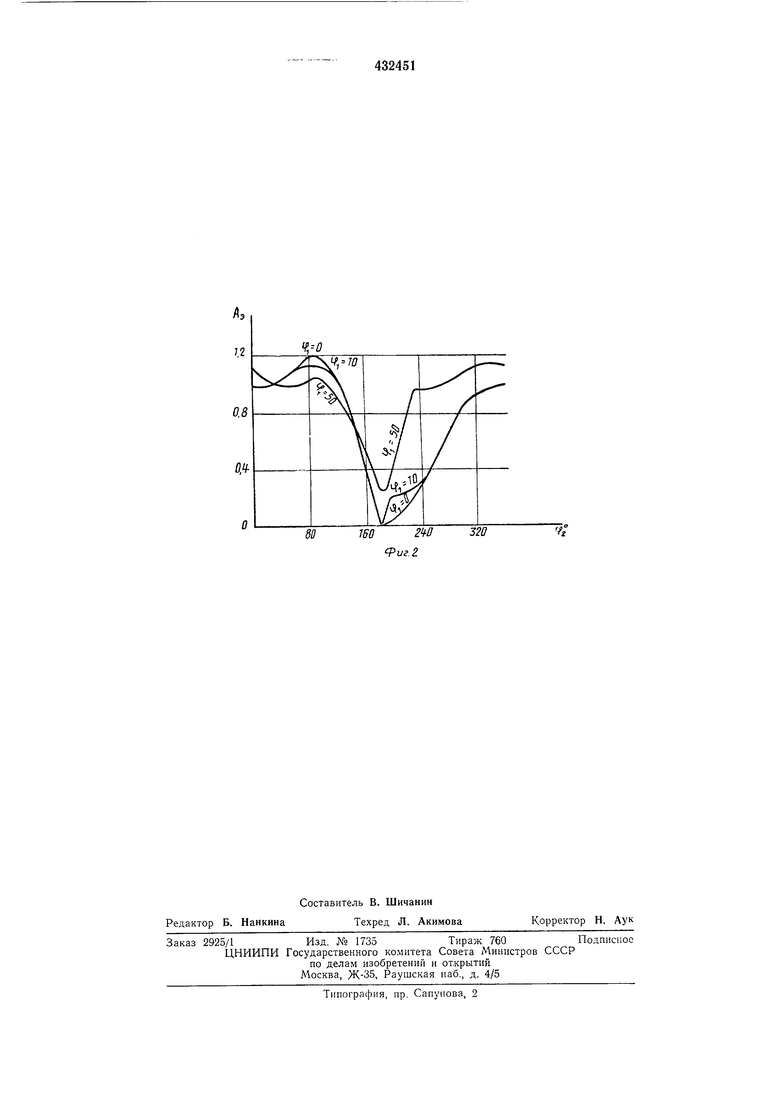
На фиг. 1 представлена блок-схема предлагаемого нелинейного фильтра низкой частоты; па фиг. 2 - эквивалентная амплитудная характеристика линейного переключающего элемента Лэ /(ф2).
Фильтр содержит линейный переключающий элемент ЛПЭ, запоминающий элемент ЗЭ, элемент сравнения ЭС, две фазосдвигающие цени Wi(S) и (5),корректирующий контур 3(5), инерционное звено Wi(S) и звено типа антивибратор 5(5).
Работа фильтра происходит следующим образом.
Выходные сигналы XL и Xz фазосдвигающих цепей поступают на вход элемента сравнения ЭС, который управляет работой ЛПЭ, осуществляющего замыкание или размыкание прямой цепи. При одинаковых знаках сигналов Xi и Xz ЭС подает команду на замыкание прямой цепи, при разных--на размыкание. Выход ЛПЭ соединен со входом запоминающего элемента ЗЭ. При замкнутой прямой цепи ЗЭ пропускает сигнал X W(S)-Wt(S)-Xs,ij при разомкнутой - выдает на выход фильтра то его значение, которое существовало в момент размыкания. Сигнал низкой частоты будет пропускаться фильтром, если знаки сигналов Xi и Xz совпадают на большей части периода колебаний. Для подавления сигнала высокой частоты необходимо, чтобы знаки сигналов Xi и Xz были различны почти на всем периоде колебания этой частоты, а хранящееся в ЗЭ значение сигнала было равно полезной составляющей (или близко к ней) в момент раамыкания.
Выполнение этих условий обеспечивает работу устройства в режиме фильтра низкой частоты и может быть достигнуто выбором передаточных функций линейных звеньев в виде:
W,(S)
T|S -I- T,s -ь 1 -ы T,s + i
W,(S}.
7,5 ч-1 + l + l .+ l
W,(S):
45 -f T,S + 1
и7,(5):й7Л5).|5|±1,
где Т, TI-TT - постоянные времени; tj и 1:2 - постоянные времени инерционного звена.
Постоянные времени инерционного звена TI и ТГ2 определяются, исходя из допустимых амплитудных и фазовых искажений полезного сигнала. Корректирующий контур должен удовлетворять условию (O) l и обеспечивать небольшое фазовое опережение на частоте полезной составляющей сигнала, компенсируя частично запаздывание, вносимое инерционным звеном. Постоянная времени Т - ,
п
где сОп - промежуточная по отношению к часTOtaM полезной составляющей и помехи частота. Постоянные Ге и- T подбираются из условия обеспечения положительного сдвига по фазе йорядка 5-Ю° на частоте помехи. Постоянные Тг (, 2, ..., 5) назначаются так, чтоёы на высоких частотах фазовая характеристика звена с передаточной функцией Wi (S) на несколько градусов превышала фазовую характеристику корректирующего контура или совпадала с ней.
Наличие дифференциальных звеньев в фазосдвигающих цепях обусловливает усиление составляющей высокой частоты по отношению к низкочастотной, вследствие чего постоянные 5 или медленно меняющиеся составляющие входного сигнала, независимо от их величины, практически не влияют на подавляющие свойства фильтра.
На фиг. 2 приведена эквивалентная амплитудная характеристика ЛПЭ, полученная с помощью метода гармонической линеаризации для входного сигнала вида
X Xt + A-sln i.
5 Коэффициент передачи по постоянной составляющей Хо равен единице.
График на фиг. 2 построен в зависимости от фазового сдвига ф2 сигнала 2 для различных значений фазового сдвига ф1 сигнала Xt.
0 Отсчет сдвига фаз ведется относительно входа прямой цепи в ЛПЭ. Из графика видно, что эффективное подавление гармонической помехи обеспечивается при и ,10°.
5 При описанном выборе передаточных функций фильтр обладает CBOIICTBOM самонастройки на частоту помехи, т. с. она подавляется независимо от ее частоты со, если только ,, н достаточно удалена от нее.
Предмет изобретен и я
Нелинейный фильтр низкой частоты, содержащий элемент сравнения, входы которого соединены с двумя фазосдвигаюнщми цепями,
5 корректирующий контур, звено тина антивибратор, связанное с одной из фазосдвигающих цепей, и инерционное звено, вход которого подключен ко вхОлЧной клемме фильтра и входу звена типа антивибратор, а выход подключен к корректирующему контуру и входу второй фазосдвигающей цепи, о т л и ч а ю щ и йся тем, что, с целью повышения точности, фильтр содержит запоминающий элемент и логический переключающий элемент, через который выход корректирующего контура соединен с запоминающим элементом и управляющий вход которого соединен с выходом элемента сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный фильтр | 1978 |
|
SU779969A1 |
| Нелинейный преобразователь для систем с переменной структурой | 1982 |
|
SU1043593A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1971 |
|
SU307394A1 |
| Система экстремального регулирования | 1989 |
|
SU1640673A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2005 |
|
RU2282152C1 |
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
| Корректирующее устройство | 1989 |
|
SU1640669A1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И БЛОК ПОВЫШЕНИЯ АСТАТИЗМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2318234C9 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1051501A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
Вь
33
320
1602W
иг.2
