1
Изобретение относится к классу высокоточных быстродействующих следящих систем и может быть применено для управления объектами., для которых требуется максимально уменьшить влияние периодических помех переменной частоты и амплитуды на регулируемую величину.
. Известна система автоматического регулирования, содержащая измеритель ,о рассогласования, корректирующий элемент, исполнительный механизм, датчик обратной связи, четыре линейных фильтра, сумматор, четыре блока умножения и источник гармонических сиг- 15 налов П 1.
Однако эта система не обеспечивает подавления периодической помехи на выходе системы в случае перемен- Q ности частоты помехи препятствует прохождению полезного сигнала на частоте помехи и формирует дополнительную помеху на той же, частоте,
мощность которой пропорциональна мощности полезного сигнала в полосе частот пропускания компенсирующего фильтра, что снижает эффективность подавления периодических помех постоянной частоты на выходе системы.
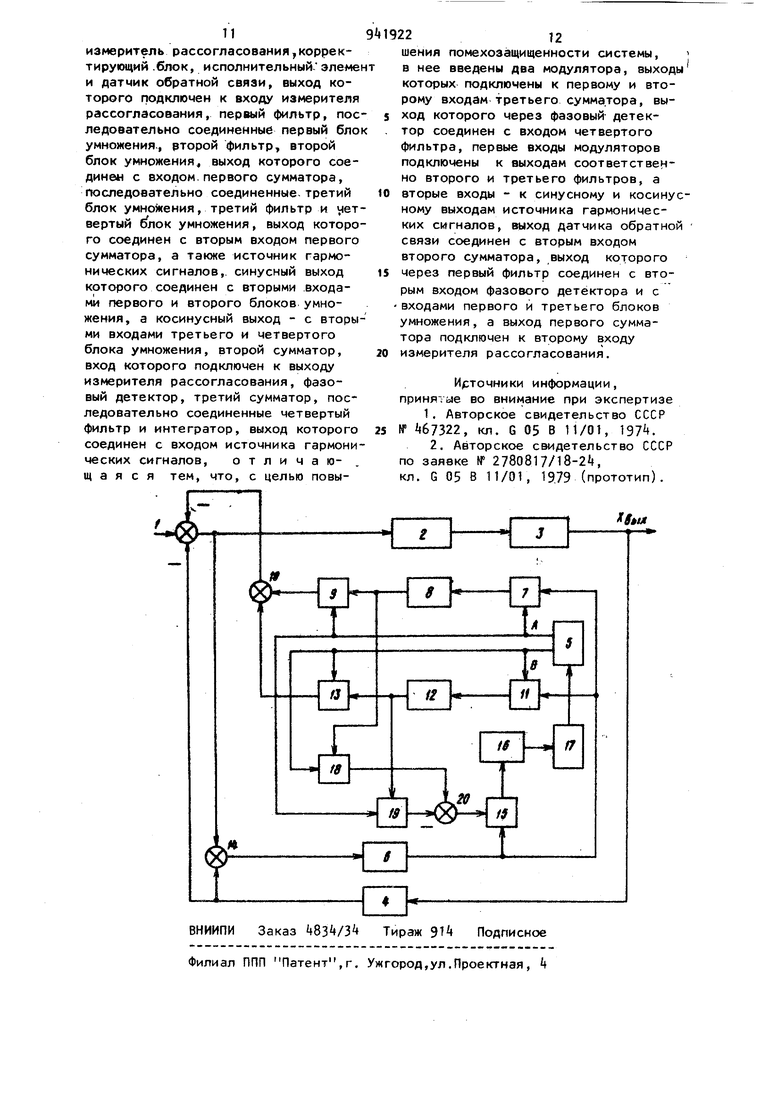
Наиболее близкой к предложенной по технической сущности является система автоматического регулирования, содержащая последовательно соединенные измеритель рассогласования, корректирующий блок, исполнительный механизм и датчик обратной связи, вход которого соединен со входом измерителя рассогласования, а также источник гармонических сигналов, первый линейный фильтр, выход которого связан с выходом датчика обрат ной связи, и последовательно соединенные первый блок умножения, второй линейный фильтр и второй блок умножения, выход которого присоединен ко входу первого сумматора, а синусный выход источника гармоничес ких сигналов связан со вторыми входами блоков умножения, кроме того, третий линейный фильтр, вход которо го соединен с выходом-первого сумматора, а выход - со входом исполнительного элемента, и последовател но соединенные третий блок умножени четвертый линейный фильтр и метвертый блок умножения, выход которого присоединен ко второму входу первого сумматора, а косинусный выход источника гармонических сигналов соединен со вторыми входами третьего и четвертого блоков умножения, а также второй источник гармонического сигнала и последовательно соединенные второй сумматор, фазовый детектор, третий сумматор, пятый ли нейный фильтр и интегратор, выход которого соединен с входом первого источника гармонических сигналов, а косинусный выход соединен со втор входом фазового детектора и первым входом второго источника гармонических сигналов, а синусный выход с вторым входом второго источника гармонических сигналов, выход которого соединен со вторым входом третьего сумматора, выход первого линейного фильтра соединен с первыми входами первого и третьего блоков умножения через второй сумматор, второй вход которого подключен к выходу измерителя рассогла сования 2 . Однако в известной системе невозможность точной реализации передаточной функции первого линейного фильтра, содержащего в качестве сомножителей передаточные функции, обратные передаточным функциям корректирующего и исполнительного элементов, для корректирующих и исполнительных элементов высокого порядка приводит к тому, что не обеспечивается полная компенсация полезной низкочастотной составляюще на выходе второго сумматора во время переходного процесса в системе, а это, в свою очередь, приводит к тому, что на вход компенсирующего фильтра поступает дополнительное во мущение, которое, проходя через компенсирующий фильтр, формирует до полнительную помеху, мощность которой пропорциональна мощности полезного сигнала в полосе частот пропускания компенсирующего фильтра. Это снижает эффективность подавления периодических помех на выходе системы. Далее, фиксированная настройка второго источника гармонических сигналов на определенную амплитуду помехи не обеспечивает достаточной компенсации второй гармонической составляющей на выходе третьего сумматора при изменении амплитуды периодической помехи и приводит к появлению расстройки по частоте в контуре фазовой автоподстройки по частоте. Целью изобретения является повышение помехозащищенности системы. Поставленная цель достигается тем, что в систему, содержащую/последовательно соединенные измеритель рассогласования, корректирующий блок, исполнитэльный элемент и датчик обратной связи, выход которого подключен ко входу измерителя рассогласования, первый фильтр, последовательно соединенные первый блок умножения, второй лыр, второй блок умножения, выход которого соединен со входом первого сумматора, последовательно соединенные третий блок умножения,третий фильтр и четвертый блок умножения, выход которого соединен со вторым первого сумматора, а таюке источник гармонических сигналов, синусный выход которого соединен со вторыми входами первого и второго блоков умножения, а косинусный выход - со вторыми входами третьего и четвертого блока умножения, второй сумматор, вход которого подключен к выходу измерителя рассогласования, фазовый детектор, третий сумматор, последовательно соединенные четвертый фильтр и интеграторi, виход которого соединен со входом источника гармонических сигналов, введены два модулятора, выходы которых подключены к первому и второму входам третьего сумматора, выход которого через фазовый детектор соединен со входом четвертого фильтра, первые входы модуляторов подключены к выходам соответственно второго и третьего фильтров, а вторые входы - к синусному и косинусному выходам источника гармонических сигналов, выход датчика обратной связи соединен со вторым входом второго сумматора, выход которого через первый I фильтр соединен со вторым входом фазового детектора и с входами первого и третьего блоков умножения, а выход лервого сумматора подключен к второму входу измерителя рассогла сования. При этом изменение связей и поло жения в структуре первого линейного фильтра обеспечивает полную компенсацию полезной низкочастотной составляющей на входе компенсирующего фильтра как в переходном режиме, так и в статике. Отсутствие этой составляющей на входе фильтра обеспе чивает точную настройку компенсирую щего фильтра по параметрам периодически помехи (амплитуде, частоте и фйзе), что, в свою очередь, позволяет повысить эффективность подав ления периодических помех на выходе системы. Введение в систему двух модуляторов позволяет, во-первых, эффективно подавлять вторую гармони образующуюся при фазовом детектиров нии периодических помех при любых изменениях амплитуды, и, во-вторых, обеспечивает постоянный фазовый сдвиг между сигналом периодической помехи и опорным сигналом, поступающим на второй вход фазового детектора, близкий к 90°. Наличие так го фазового сдвига позволяет обеспечить надежную синхронизацию контура фазовой автоподстройки с частотой периодической помехи. На чертеже показана блок-схема системы. Система содержит последовательно соединенные измеритель рассогласования 1, корректирующий блок 2, исполнительный элемент 3, датчик k обратной связи, выход которого соединен со входом измерителя рассогла сования 1, а также источник 5 гармонических сигналов, и последовательно соединенные первый фильтр 6, первый блок умножения 7, второй фильтр 8 и второй блок умножения 9, выход которого присоединен ко входу первого сумматора 10, а синусный выход А источника 5 гармонических сигналов связан со вторыми входами блоков умножения 7 и 9, и последовательно соединенные третий блок ум ножения 11, третий фильтр 12 и четвертый блок умножения 13, выход которого присоединен ко второму ВХОДУ первого сумматора 10, а выход последнего соединен со вторым входом измерителя рассогласования 1, при этом косинусный выход В источника гермонических .сигналов 5 соединен со вторыми входами блоков умножения 11 и 13, кроме того, выход измерителя рассогласования 1 присоединен к первому входу второго сумматора , второй вход которого связан с выходом датчика обратной связи k, а выход - со входом первого фильтра 6, а выход первого фильтра 6 через последовательно соединенные фазовый детектор 15, четвертый фильтр 16 и интегратор 17 присоединен к управляющему входу источника гармонических сигналов 5. Кроме того, система содержит два модулятора 18 и 19, первые входы которых присоединены к выходам второго 8 и третьего 12 фильтров, вторые входы - к синусному А и косинусному В выходам истоМника 5 гармонических сигналов, а выходы модуляторов связаны с первым и вторым входами третьего сумматора 20, выход которого присоединен ко второму входу фазового детектора 15Система работает следующим образом. При действии на систему периодической помехи переменной амплитуды и частоты на первый вход второго сумматора поступает сигнал с выхода измерителя рассогласования: (t)X4Ct)-Z(t), гдеХрх - входной полезный сигнал; КА - коэффициент передачи датчика обратной связи; Xgj,,(t)- выходной сигнал системы; ХцШ сигнал помехи, действующий на систему; ZW - выходной сигнал компенсирующего фильтра. Этот сигнал в сумматоре 1 суммируется с сигналом датчика обратной связи, в итоге на вход компенсирующего фильтра поступает сумма входного полезного сигнала и сигнала ошибки компенсации периодической помехи X,.W-x,,t))-z(t). Передаточная функция линейного фильтра 6 выбирается таким образом, чтобы отфильтровать сигнал ошибки компенсации периодической помехи от входного полезного сигнал X(j(-fc)yv,(t)-Z(t) Например, если В)(оцной полезный сигнал может быть представлен в рид степенного ряда XBx(t) Co-C,t4-..., то передаточная функция линейного фильтра 6 выбирается в виде произведения реальных дифференцирующих звеньев p, f,. 6 P 4p /VT; J-Vp T,,, Таким образом, для того, чтобы отфильтровать постоянный входной по лезный сигнал, линейный фильтр 6 до жен состоять из одного звена реального дифференцирования, для фильтра ции линейно нарастающего входного полезного сигнала - из двух последо вательно соединенных звеньев и т.д. При действии на систему периодической помехи на первые входы блоков умножения 7 и 11 поступает сигнал ошибки компенсации периодической по хи, на вторые входы этих блоков умножения подаются сигналы соответственно с синусного А и косинусного В выходов источника гармонических сигналов 5. Выделенные в результате синхронного детектирования производимого блоками умножения 7 и 11, и последующего сглаживания линейными фильтрами 8 и 12 огибающие квадратурных составляющих помехи С и Д подвергаются модуляции в блоках умножения 9 и 13. После этог на выходе сумматора 10 имеем отфиль трованный сигнал периодической поме хи Z (t)C -T5 C05u;ot, где Uo - частота сигналов на выходе генератора синусоидаль ных колебаний 5, который, поступая на вход измерителя рассогласования 1, компенсирует действующую на систему помеху. Если периодическая помеха имеет переменную частоту или частота поме не совпадает с частотой генератора синусоидальных колебаний 5, то контур фазовый автоподстройки по частоте настраивает генератор на частоту помехи. Для описания работы этого контура сигнал периодической помехи представлен в виде разложения в ряд Фурье J v,(t) csiHlwt+l coBUJt+G-(U;), где С, Д - амплитуда квадратурных составляющих основной гармоники помехи, (j((SJ/ - остаточный член разложения в ряд Фурье, учитывающий высшие гармоники периодической помехи. Итак, на первый вход фазового детектора 15 поступает сигнал ошибки компенсации периодической помехи : X (,it) - Cc,iv, (Dt -DCOS out OCtu)- ubt --E sin (u)t -Ч))i()CM. Ha второй вход фазового детектора поступает сигнал с выхода сумматоfpa 20 X 2o(.-t) - С cos UUot tDot -E COSdUbt -M)), представляющий собой разность выходных сигналов модуляторов 18 и 19, в которых огибающие квадратурных составляющих помех и Д модулируются .опорными сигналами, сдвинутыми на 90. В результате синхронного детектирования в фазовом детекторе 15 на.вход линейного фильтра 1б поступает сигнал (Ш-ШoUv - - -iE l.in() (T(jtiot 14), который, проходя через линейный фильтр 16, сглаживается и поступает на вход интегратора 17. В результате на управляющий вход источника 5 гармонических сигналов поступает сигнал, пропорциональный мгновенной разности фаз между сигналом периодической помехи и опорным сигналом источника 5 гармонических сигналов. По этому сигналу источник гармонических сигналов перестраивается на частоту помехи.
При действии сигнала периодичёской помехи переменной амплитуды на предлагаемое устройство на вход компенсирующего фильтра поступает только ошибка компенсации сигнала периодической помехи. В первый момент времени, пока фильтр не настроен по параметрам помехи, на вход компенсирующего фильтра фактически поступает сигнал периодической помехи. По мере настройки фильтра увеличивается коэффициент подавления сигнала периодической помехи на выходе системы, уменьшается сигнал ошибки компенсации на входе компенсирующего фильтра и при точной настройке фильтра по параметрам (частоте и амплитуде) периодической помехи он стремится к нулю. При появлении расстройки между параметрами помехи и фильтра появляется сигнал на выходе компенсирующего фильтра, по которому фильтр перестраивается на изменившиеся параметры помехи. Таким образом, компенсация сигнала периодической помехи в предлагаемом устройстве осуществляется по принципу обратной связи, что позволяет поднять коэффициент подавления сигнала периодической помехи переменной частоты и амплитуды на выходе системы до 100 во всем диапазоне рабочих частот системы автоматического регулирования при любых изменениях частоты, амплитуды и фазы сигнала периодической помехи. У известной системы этот коэффициент равен 50. Кроме того, при действии периодической помехи переменной частоты и амплитуды в известной системе из-за неточной реализации передаточной функции линейного фильтра 6 на входе компенсирующего фильтра полезная составляющая компенсируется не полностью. Примерно 20-30 по мощности от этой составляющей поступает в компенсирующий фильтр, проходит через него и поступает на вход испол.нительного элемента 3. Таким образом, в основной контур системы поступает дополнительное возмущение, мощность которого пропорциональна мощности полезного сигнала в полосе частот пропускания компенсирующего фильтра. Это приводит к тому, что в 1,2 - 1,3 раза снижается общий коэффициент усиления и увеличиваются постоянные времени системы. Это приводи
к пропорциональному уменьшению частоты среза и точности системы. В результате в системе прототипа в 3-5 раза затягивается длительность переходного процесса и увеличиваетс ошибка системы.. Кроме того, фиксированная настройка второго источника 20 гармонических сигналов по амплитуде помехи приводит к тому, что при изменении этой амплитуды не обеспечивается полное подавление второй гармоники помехи, образующейся при фазовом детектировании Таким образом, в контуре фазовой автопоДстройки по частоте образуется дополнительное возмущение, которое приводит к появлению расстройки по частоте между сигналом периодической помехи и опорным гармоническим сигналом. Наличие расстройки по частоте между сигналом периодическо помехи и выходным сигналом источника гармонических сигналов всего в 5 Гц приводит к тому, что коэффициент подавления сигнала периодической помехи на выходе системы падает в 10 раз. Предлагаемое устройство лишено этих недостатков.
Для внедрения предлагаемого устройства проведено математическое описание и математическое моделирование устройства для конкретной исходной системы автоматического регулирования (блоки 1-4), подтвержденной влиянию периодических помех переменной частоты и амплитуды, разработана принципиальная схема и изготовлен квадратурный фильтр (блоки ), для которого имеется техническое описание.
Преимущество предлагаемого изобретения заключается в том, что оно позволяет повысить помехозащищеннос системы, приблизить характеристики (динамические характеристики, точность) системы автоматического регулирования с компенсирующим фильтром к характеристикам исходной, системы, и упростить выбор параметров компенсирующего фильтра - осуществлять его независимо от характеристик исходной системы.
Формула изобретения
Система автоматического регулирования с компенсацией помех содержащая последовательно соединенные
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования | 1979 |
|
SU930232A2 |
| Система автоматического регулирования | 1974 |
|
SU467322A1 |
| Анализатор устойчивости динамических систем с обратной связью | 1986 |
|
SU1354137A1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| Способ автоматической дуговой сварки и устройство для его осуществления (его варианты) | 1984 |
|
SU1235682A1 |
| Индикаторное устройство | 1989 |
|
SU1747904A1 |
| УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ О ПАВОДКЕ ИЛИ СЕЛЕ | 2000 |
|
RU2190255C2 |
| Анализатор устойчивости динамических систем с обратной связью | 1987 |
|
SU1432423A2 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| Индикаторное устройство | 1990 |
|
SU1793229A2 |
