Известны бесконтактные двига1ели возвратно-поступательного движения, состоящие из статора о иагнитопроводом и обмотками управления, якоря, упругих элементов, аккумулирующих энергию торможения, и коммутатора, имеющего ключи, коммутирующие обмотки,
В описываемом двигателе для его упрощения, повышения надежности и устойчивости движения при малых амплитудах подвижной части на статоре установлен датчик, чувствительный к направлению движения (датчик направления), соединенный своими выходами со входами ключей.
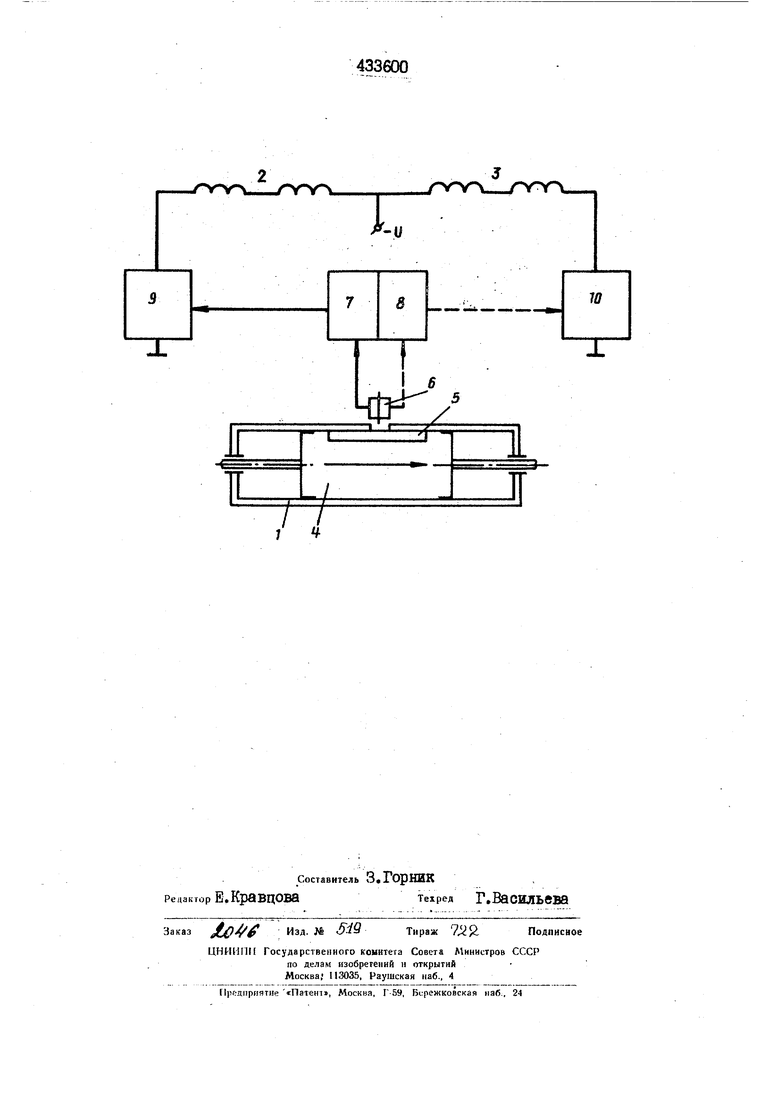
На чертеже приведена структурная схема двигателя, состоящего из статора I с обмотками 2 и 3 (обмотки могут располагаться и на подвижной части) и подвижного якоря 4, Датчик направления содержит возбудитель 5 (например постоян{шй магнит), укрепленный иа якоре 4 и сигнальные обмотки 6, подключенные
ко входам усилителей 7 и 8, подающих сигнал на управляющие ключи 9 и 10, коммутирующие обмотки 2 и 3 двигателя. Датчик имеет две обмотки,, каждая из которых подключена к одному из усилителей 7 и 8, Двигатель снабжен пускателем, имеющим спусковое устройство, соединенное со входом одного из усилителей. По сигналу внешней команды пусковое устройство подает на вход одного из усилителей (например усилителя 7) одиночный импульс, не превышающий по длительности noловины периода рабочей частоты двигателя. Этот импульс усиливается, и усилитель 7 подает на ключ 9 отпирающий сигнал, обмотка 2 подключается к источнику питания, Якорь 4 начинает движение вправо. При движении подвижной части в Сигнальных обмотках б датчика возникает э.д.с. Сигнальные обмотки датчика 6 обеспечивают подачу на усилители 7 и 8 сигналов, находящихся в противофазе. Таким образом при движении вправо усилитель
7уже под влиянием сигнала с датчика 6 продолжает отпирать ключ 9, который подключает обмотку 2, создающую усилие, направленное по движению, т.е. вправо. В это время ключ 10 заперт.
При движении вправо газ сжимается в правой буферной полости и разряжается в левой. Разность давлений создает силу сопротивления, направленную против движения. Скорость подвижной части падает.
8какой то момент скорость достигает такой величины, при которой становится энергетически выгодным отключить обмотку от сети из-за увеличения тока и потерь в меди. Ширина возбудителя рассчитана таким образом, что в этот момент датчик проходит за край возбудителя 5 и а.д.с. в датчике исчезает (или становится настолько мала, что сигнал с усилителя не в состоянии отпереть ключ, при этом ключи 9 и 10 будут заперты.
Дальнейшее движение подвижной части происходит по инерции, затем ее скорость падает до нуля и начинается разгон в обратную сторону за счет энергии упругого элемента (сжатого газа в (5у(|)ерах или пружины). Когда обмотки датчика 6 достигнут края возбудителя 5, скорость подвижной части достигнет значительной величины. При этом в обмотках датчика 6 возникает а,д.с., достаточная для того, чтобы открылся ключ, но противоположного знака, в результате чего отпирающий сигнал подается усилителем 8 на ключ 10. Ключ 9 заперт.
Скорость движения и усилие на подвижную часть от привода направлены влево. Процесс повторяется с движением I левую сторону.
В рассматриваемой схеме двигателя устойчивый автоколебательный режим, аналогичный описанному выше,возможен и при ходе подвижной части, меньшем ширины возбудителя 5. Такой режим возможен при пуске
(раскачке) двигателя.
Двигатель может работать и при включении обмотки при ходе только в одну сторону (питание однополупериодными импульсами). В
этом случае достаточно иметь одну .обмотку 6, один усилитель и один длюч.
ПРЩМЕТ ИЗОБРЕТЕНИЯ
Бесконтактный двигатель возвратно-поступательного движения, состоящий из статора с обмотками управления, якоря, упругих элементов, аккумулирующих энергию торможения, и коммутатора, имеющего ключи, коммутирующие обмотки, отличающийся тем, что, с целью упрощения, повышения надежности и устойчивости движения
при малых амплитудах перемещения, на статоре установлен датчик направления движения, соединенный своими выходами со входами указан ных ключей.
« 
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1969 |
|
SU245879A1 |
| Высокоскоростной вентильный электродвигатель | 1981 |
|
SU1197018A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ ВИБРАЦИОННОГО ДВИЖЕНИЯ КОЛЕБАТЕЛЬНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ И ЭЛЕКТРОМАГНИТНЫЙ ВИБРОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147941C1 |
| Автоматическое устройство для рядовой намотки провода | 1986 |
|
SU1436139A1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| Устройство для управления электроприводом | 1982 |
|
SU1051680A1 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU748760A1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |