Изобретение относится к системам связи и может быть использовано для расширения зоны обслуживания в районах, где из-за рельефа местности отсутствует или наблюдается неустойчивый прием радиотелевизионного сигнала СВЧ. Прямому прохождению сигнала при этом препятствует наличие холма или горной преграды, а также то, что приемная станция может находиться в ложбине. В таких случаях используют специальные линии СВЧ-связи и ретрансляторы. Источником радиотелевизионного сигнала может быть наземный источник или космический аппарат (КА).
Известны способы наведения приемных антенн станций спутниковой связи, в частности, станции "Орбита", предназначенных для приема телевидения (Покрас А.М., Сомов А.М., Цуриков Г.Г. Антенны земных станций спутниковой связи. - М.: Радио и связь, 1985, с.22-27). Наведение антенн на КА в этих станциях производится следящими электроприводами в режимах автоматического автосопровождения, управления от программного устройства или полуавтоматического управления. В станции используется параболическая зеркальная антенна, размещенная в двухосном азимутально-угломестном опорно-поворотном устройстве. В станции обеспечивается высокая точность наведения антенны (на уровне единиц угловых минут).
Недостатками такого способа наведения антенн являются значительные массо-габаритные характеристики и энергопотребление, а также относительно высокая стоимость станции. Это обусловлено техническими характеристиками станции, прежде всего большой скоростью приема информации и высокой точностью наведения антенны.
Известны наземные станции спутниковой связи, которые обычно представляют собой приемо-передающие радиостанции с одной общей параболической антенной (на прием и на передачу) (Бартенев В.А., Болотов Г.В., Быков В.Л. и др. Под редакцией Кантора Л.А. Спутниковая связь и вещание. - М.: Радио и связь, 1997, с.404-409). Для наведения антенны в этих станциях используются способы, в которых осуществляют режим программного наведения в заданную точку пространства, режим поиска и захвата сигнала, а также режим точного наведения по принимаемому сигналу (режим автосопровождения). В режиме точного наведения могут использоваться различные методы наведения по принимаемому сигналу: метод экстремального наведения, моноимпульсный метод и др.
Недостатками данных способов являются: сравнительно большое энергопотребление, значительные массо-габаритные характеристики и относительно высокая стоимость станции.
Прототипом изобретения является способ наведения антенны, реализованный в станции спутниковой связи предприятия ЗАО "Полюс", содержащей параболическую зеркальную антенну с СВЧ-блоком и блоками азимутальной и угломестной осей, блок наведения антенны, устройства индикации, устройство ввода данных, вычислительное устройство, снабженное программами, включая наведение антенны (Фролов О.П. Антенны для земных станций спутниковой связи. - М.: Радио и связь, 2000, с.260-265).
В данном способе проводят программное наведение антенны по углу места и азимуту в заданную точку пространства. Также осуществляют операцию поиска сигнала по углу места и азимуту. После захвата сигнала проводят точное наведение на источник сигнала по углу места и азимуту с использованием метода экстремального наведения. По результатам точного наведения производят уточнение (коррекцию) угла места и азимута источника сигнала в программе вычислительного устройства.
Программное наведение антенны по углу места и азимуту производят путем разворота антенны на рассчитанные в вычислительном устройстве углы от базовых измерительных плоскостей:
- плоскости горизонта - для угла места;
- плоскости меридиана - для азимута.
Недостатками данного способа наведения антенны являются относительно большое энергопотребление, значительные массо-габаритные характеристики и стоимость аппаратуры.
Задачей предлагаемого изобретения является упрощение аппаратуры ретранслятора, снижение его энергопотребления, массо-габаритных характеристик и стоимости. Снижение энергопотребления особенно важно при установке ретрансляторов в отдаленных районах, где необходимо использовать автономные источники электроэнергии, что существенно увеличивает массу, габариты и стоимость ретранслятора.
Достигаемый при этом технический результат заключается в упрощении аппаратуры ретранслятора, снижении его энергопотребления, уменьшении массы и габаритов.
Для достижения указанного технического результата предложен способ передачи радиотелевизионного сигнала, включающий предварительное наведение приемной антенны ретранслятора на источник сигнала путем предварительного разворота приемной антенны по азимуту и углу места до захвата сигнала с ее последующим точным наведением по азимуту и углу места на источник сигнала, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными азимутом и углом места, при этом разворот приемной антенны по азимуту при предварительном наведении приемной антенны ретранслятора на источник сигнала производят непрерывно с постоянной скоростью, при развороте измеряют значения углов, при которых фиксируют появление и пропадание сигнала, величина которого составляет от семидесяти до семидесяти пяти процентов от максимального значения, измеренные значения азимутальных углов используют для реализации режима точного наведения приемной антенны на источник сигнала, найденное в режиме точного наведения приемной антенны азимутальное положение источника сигнала учитывают при наведении передающей антенны на абонентскую станцию по азимуту, рассчитанные значения угла места и азимута абонентской станции отображают на устройствах индикации, соответственно, угла места и азимута абонентской станции, после этого передающую антенну, в соответствии с программой вычислительного устройства, наводят на абонентскую станцию сначала по углу места, а потом по азимуту, затем в соответствии с отображенными на устройствах индикации рассчитанными значениями угла места и азимута абонентской станции, а также показаниями угломестной и азимутальной шкал передающей антенны проводят одну или две коррекции положения передающей антенны с доведением до рассчитанных значений углов сначала по углу места, а потом по азимуту, причем отрабатываемые при коррекции положения угловые поправки вводят в вычислительное устройство с помощью устройства ввода данных, после этого фиксируют положение передающей антенны и осуществляют передачу радиотелевизионного сигнала. При наведении передающей антенны на абонентскую станцию в зависимости от рассчитанных величин угла места и азимута осуществляют разворот антенны или медленный, или сначала быстрый, а потом медленный.
Предлагаемый способ реализуется в ретрансляторе благодаря использованию дополнительных режимов при наведении передающей антенны. Способ иллюстрируется функциональной схемой ретранслятора, приведенной на фиг.1, блок-схемой режимов наведения приемной и передающей антенн, приведенной на фиг.2, блок-схемой подпрограммы определения режимов программного разворота передающей антенны по углу места, приведенной на фиг.3.
Предлагаемое изобретение относится к ретрансляторам, характеризующимся относительно невысокой скоростью передачи информации, имеющим сравнительно небольшой диаметр зеркала и относительно широкую диаграмму направленности антенны (порядка 1,5-3 градусов). В качестве примера рассматривается ретранслятор, имеющий ширину диаграммы направленности приемной и передающей антенн 120 угловых минут.
Для частот 5-8 ГГц диаметр антенны ретранслятора составляет от 2,1 до 1,3 метра.
Достаточно высокой считается точность наведения антенны с потерями по мощности 0,5 дБ, что соответствует погрешности наведения, равной ±0,2 ширины диаграммы направленности антенны. Для рассматриваемого примера это соответствует ошибке наведения ±24 угловые минуты.
Ретранслятор, изображенный на фиг.1, содержит приемную антенну 1, на которой установлен СВЧ-блок 2 приемной антенны, соединенный с размещенным на передающей антенне 3 СВЧ-блоком 4 передающей антенны. СВЧ-блок 2 и СВЧ-4 предназначены для преобразования частоты, усиления и фильтрации ретранслируемого СВЧ-сигнала. Второй выход СВЧ-блока 2 приемной антенны подсоединен к блоку 5 наведения приемной антенны, служащему для преобразования СВЧ-сигнала в сигнал, используемый для точного наведения приемной антенны 1. Для управления по азимутальной оси 6 приемной антенны ретранслятор содержит блок 7 азимутальной оси приемной антенны, а для управления по угломестной оси 8 приемной антенны - блок 9 угломестной оси приемной антенны. Для управления по азимутальной оси 10 передающей антенны ретранслятор содержит блок 11 азимутальной оси передающей антенны, а для управления по угломестной оси 12 передающей антенны - блок 13 угломестной оси передающей антенны. В состав блоков 7 и 9 приемной антенны и блоков 11 и 13 передающей антенны входят приводы, обеспечивающие поворот осей. В состав блоков 7 и 9 также входят датчики углов с устройствами обработки сигналов.
На передающей антенне ретранслятора установлены азимутальная шкала 14 передающей антенны и угломестная шкала 15 передающей антенны. Ретранслятор содержит также вычислительное устройство 16, предназначенное для управления приемной антенной 1 и передающей антенной 3 и соединенное с блоками 5, 7, 9, 11, 13. Кроме того, в состав ретранслятора входят подсоединенные к вычислительному устройству 16 устройство 17 индикации угла места абонентской станции, устройство 18 индикации азимута абонентской станции, а также устройство 19 ввода данных. Приемная антенна 1 ретранслятора предназначена для усиления принимаемого радиотелевизионного сигнала 20, приходящего от источника сигнала, а передающая антенна 3 - для усиления излучаемого радиотелевизионного сигнала 21, поступающего от ретранслятора на абонентскую станцию.
На фиг.2 изображены режимы наведения приемной и передающей антенн ретранслятора: 22 - начальное положение приемной антенны и исходное положение передающей антенны; 23 - режим разворота приемной антенны для захвата сигнала; 24 - режим точного наведения приемной антенны; 25 - программное наведение передающей антенны на абонентскую станцию по углу места; 26 - программное наведение передающей антенны на абонентскую станцию по азимуту; 27 - первая коррекция положения передающей антенны по углу места; 28 - первая коррекция положения передающей антенны по азимуту; 29 - вторая коррекция положения передающей антенны по углу места; 30 - вторая коррекция положения передающей антенны по азимуту; 31 - фиксация положения передающей антенны.
На фиг.2 показаны штатные режимы наведения приемной и передающей антенн, а также дополнительные режимы, использование которых позволит обеспечить получение. указанного технического результата. Блок-схема отражает последовательность и взаимосвязь режимов.
При установке и вводе ретранслятора в эксплуатацию производится его начальная выставка. При этом обычно при помощи шайб и прокладок, а также измерительных средств (уровень, теодолит) осуществляется выставка азимутальных осей антенн перпендикулярно горизонтальной плоскости. Взаимная привязка азимутальных систем (нулевых азимутальных отсчетов) приемной и передающей антенн производится при изготовлении ретранслятора с помощью посадочных штифтов, если используется общее основание для обеих антенн. При раздельных основаниях антенн их азимутальная привязка осуществляется при установке ретренслятора с помощью теодолита и технологических зеркал. Привязка азимутальной измерительной системы ретранслятора к меридиану проводится с помощью дополнительных технических средств (магнитный компас, гирокомпас, радиокомпас и т.д.).
Предлагаемое изобретение позволяет отказаться от привязки азимутальной измерительной системы ретранслятора к меридиану и от дополнительных технических средств.
Предложенный способ наведения передающей антенны ретранслятора на абонентскую станцию реализуется следующим образом.
После подачи на ретранслятор питания осуществляют программный перевод приемной антенны 1 (фиг.1) из исходного (транспортного) положения в начальное положение (значение угла места и азимута равны нулю) и стабилизацию ее в этом положении. Передающую антенну 3 оставляют в исходном положении. Это состояние соответствует режиму 22 (фиг.2). Для программного разворота по азимуту приемной антенны 1 (фиг.1) по сигналам вычислительного устройства 16 используют привод, размещенный в блоке 7 азимутальной оси приемной антенны. Разворот производят вокруг азимутальной оси 6. С помощью привода, размещенного в блоке 9 угломестной оси приемной антенны, осуществляют разворот вокруг угломестной оси 8. Скорость разворота антенны составляет от нескольких градусов до нескольких десятков градусов. Время стабилизации антенны определяется динамическими характеристиками контура управления. Минимальное требуемое время не превышает 1 секунды.
После этого осуществляют дополнительный режим 23 (фиг.2) - режим разворота приемной антенны 1 (фиг.1) для захвата сигнала.
Ввод в вычислительное устройство 16 навигационных данных, характеризующих положение ретранслятора, источника сигнала и абонентской станции, расчет по этим данным программных углов места источника сигнала и абонентской станции производят до проведения режима 23 (фиг.2).
Относительно высокая точность наведения приемной антенны 1 (фиг.1) по углу места по сравнению с шириной диаграммы направленности позволяет реализовать однострочный по углу места поиск сигнала. Азимутальный разворот проводится только при одном расчетном значении угла места источника сигнала.
Погрешность наведения приемной антенны 1 на источник сигнала по углу места для рассматриваемой группы ретрансляторов с относительно широкой диаграммой направленности составляет не более (0,1-0,2) ширины диаграммы направленности антенны. Указанная погрешность складывается из ошибки горизонтирования ретранслятора, ошибки местонахождения (неопределенности положения) источника сигнала и ретранслятора, ошибки отработки программного угла.
Для рассматриваемого примера ретранслятора с шириной диаграммы направленности антенны 120 угловых минут данные ошибки являются случайными величинами и составляют: ошибка негоризонтальности - не более 5 угловых минут; ошибка местонахождения источника сигнала для современных КА - не более 6 угловых минут, ошибка отработки программного угла - не более 0,1 ширины диаграммы направленности, то есть 12 угловых минут.
Таким образом, суммарная ошибка, определяемая сложением случайных величин, составляет 14 угловых минут.
В указанном режиме 23 (фиг.2) сначала проводят разворот приемной антенны 1 (фиг.1) на рассчитанный программный угол места источника сигнала. Управление приемной антенной 1 осуществляют с помощью вычислительного устройства 16 и блока 9. Затем с помощью вычислительного устройства 16 и блока 7 производят разворот приемной антенны 1 по азимуту при постоянном угле места. Причем разворот производят не дискретно, а непрерывно и с постоянной скоростью.
В общем случае угол разворота приемной антенны 1 до захвата сигнала может достигать 360 градусов. Введение этого разворота позволяет отказаться от привязки азимутальной измерительной системы ретранслятора к меридиану и от дополнительной аппаратуры (магнитный компас, гирокомпас, радиокомпас), которая используется для начального определения меридиана.
В предложенном изобретении в качестве физически реализуемого азимутального базового направления предлагается использование направления оптической оси приемной антенны 1 на источник сигнала (наземный или КА). При этом направление меридиана, которое используется в программе наведения передающей антенны 3, находят расчетным путем. Угол Ψис между меридианом и направлением на источник сигнала и угол ΨАС между меридианом и направлением на абонентскую станцию находят по известным координатам (широте и долготе) источника сигнала (для КА - по координатам подспутниковой точки), абонентской станции и ретранслятора.
При наведении приемной антенны 1 на источник сигнала определяют угол АЗис. Требуемый для программного азимутального наведения передающей антенны 3 на абонентскую станцию угол АзАс (азимут абонентской станции) находят из выражения

Принимаемый радиотелевизионный сигнал 20 (фиг.1) от источника сигнала обнаруживают с помощью приемной антенны 1. В СВЧ-блоке 2 осуществляют преобразование СВЧ-сигнала: фильтрацию, усиление, изменение частоты. После преобразования сигнал подают на блок 5 наведения приемной антенны. С помощью этого сигнала реализуют контур наведения приемной антенны 1 по принимаемому сигналу.
С помощью блока 5 и вычислительного устройства 16 фиксируют величину сигнала, составляющую от семидесяти до семидесяти пяти процентов от максимального значения сигнала, что соответствует границам диаграммы направленности приемной антенны 1 (уровню потерь по мощности 3 дБ). В моменты перехода сигналом этого уровня (появления и пропадания сигнала) с помощью входящих в состав блока 7 датчика угла и устройства обработки сигналов, а также вычислительного устройства 16 измеряют значения углов, соответствующие этим моментам. Азимут источника сигнала находят как полусумму найденных углов и вводят в вычислительное устройство 16. Найденный азимут и рассчитанный ранее угол места источника сигнала используют для реализации режима точного наведения приемной антенны 1 на источник сигнала.
Предложенный в изобретении метод поиска сигнала позволяет существенно сократить время данной операции. Обычно поиск сигнала осуществляют путем дискретного разворота антенны. Это упрощает управление антенной и обнаружение источника сигнала. В предложенном методе не предъявляется жестких требований к стабильности скорости поворота антенны, поскольку при обнаружении сигнала осуществляют измерение углов. Поэтому по сложности реализации оба метода равнозначны. Повышение быстродействия в предложенном методе поиска сигнала обеспечивают за счет двух факторов.
Во-первых, при дискретном движении антенны необходимо обеспечить перекрытие соседних позиций. Коэффициент перекрытия определяется как отношение ширины диаграммы направленности антенны и величины шага, т.е. расстояния между соседними положениями оптической оси антенны. Величина этого коэффициента зависит от ошибки наведения антенны и реально составляет 1,2-1,8.
Во-вторых, средняя скорость при дискретном движении антенны существенно меньше, чем при установившемся движении с постоянной скоростью. Это обусловлено тем, что при дискретном движении измерение сигнала в соответствующем положении производят при неподвижной антенне. Перемещение антенны при этом занимает часть времени одного шага и включает фазы разгона двигателя, вращения с установившейся скоростью и торможения.
С учетом обоих факторов скорость поиска сигнала в предложенном методе может быть увеличена в 2-3 раза.
Для рассматриваемого примера ретранслятора с шириной диаграммы направленности антенны 120 угловых минут при длительности одного шага 0,1 секунды и коэффициенте перекрытия 1,5 время поиска сигнала для угла 360 градусов составляет 27 секунд. С помощью предложенного метода оно уменьшается до 9-14 секунд.
После захвата сигнала осуществляют штатный режим 24 (фиг.2) - точное наведение приемной антенны 1 (фиг.1) на источник сигнала по азимуту и углу места с помощью, например, известного метода экстремального наведения. Режим 24 (фиг.2) осуществляют с помощью вычислительного устройства 16 и блоков 5, 7 и 9 (фиг.1).
Найденное в режиме 24 (фиг.2) точного наведения приемной антенны 1 (фиг.1) значение азимута источника сигнала используют для расчета азимута абонентской станции с помощью формулы (1). Это рассчитанное значение азимута, а также значение угла места абонентской станции, рассчитанное после ввода в вычислительное устройство 16 (фиг.1) навигационных данных, отображают, соответственно, на устройстве 18 индикации азимута абонентской станции и на устройстве 17 индикации угла места абонентской станции.
В данном способе для обеспечения требуемой точности наведения передающей антенны 3 на уровне ±0,2 ширины диаграммы направленности, учитывая относительно широкую диаграмму направленности рассматриваемых ретрансляторов, предлагается использовать более простую систему наведения передающей антенны 3. Вместо обычно применяемой системы с датчиком угла, который является источником информации о положении антенны, используется программное управление длительностью сигнала, поступающего на двигатель постоянного тока, обеспечивающий поворот антенны. Это позволит отказаться от дорогостоящей аппаратуры: датчиков угла и устройств обработки информации. При этом также упрощается источник электропитания.
Точность отработки программного угла повышается благодаря повторным операциям (коррекции) в полуавтоматическом режиме с использованием устройств индикации и шкал. Такой режим допустим, поскольку начальная установка ретранслятора, выставка его осей и посадочных плоскостей, его включение и ввод данных в программу проводится обслуживающим персоналом.
Блоки 11 и 13 азимутальной и угломестной осей передающей антенны 3 снабжаются шкалами для визуального определения угла поворота соответствующей оси. В радиостанциях с направленными антеннами обычно шкалы используются для решения технологических задач. Погрешность шкалы составляет не более 10 угловых минут, что вполне допустимо для рассматриваемых ретрансляторов.
На изображенной на фиг.3 блок-схеме подпрограммы вычислительного устройства 16 (фиг.1) приведены операции, позволяющие реализовать программное управление длительностью сигнала, поступающего на привод угломестной оси 12 передающей антенны 3. Величину исходного угла места УМи передающей антенны 3 вводят в вычислительное устройство 16 при изготовлении ретранслятора (операция 32, фиг.3). Величину программного угла места абонентской станции УМАС находят и вводят в данную подпрограмму (операция 33, фиг.3) после ввода в вычислительное устройство 16 (фиг.1) навигационных данных и до проведения режима 23 (фиг.2).
Запуск подпрограммы производят в режиме 24 (фиг.2) точного наведения приемной антенны 1 (фиг.1) с выполнения операции 34 (фиг.3) - определения программного угла разворота передающей антенны 3 (фиг.1) по углу места ΔУМп, который находят из выражения

Затем осуществляют операцию 35 (фиг.3) - определение режима разворота: величину ΔУМп сравнивают с выбранным порогом ΔУМр

Для повышения точности отработки программного угла передающей антенны 3 (фиг.1) применяют два режима: быстрый и медленный.
В двигателе постоянного тока в установившемся режиме угловая скорость вращения ротора пропорциональна величине входного напряжения U. Поэтому величина угла поворота, определяемая из формулы
пропорциональна интервалу времени At, который находят из выражения
где КD - коэффициент, учитывающий статическую и динамическую угловые ошибки.
Статическая ошибка определяется трением, потерями в обмотке ротора и другими составляющими. Динамическая ошибка, прежде всего, определяется инерционностью привода (двигателя, редуктора) и антенного устройства.
Для рассматриваемых ретрансляторов вследствие относительно больших угловых скоростей (десятки градусов в секунду) и значительной инерционности (более 10-15 миллисекунд) при отработке небольших углов определяющей является динамическая ошибка. Введение медленного режима решает задачу повышения точности наведения передающей антенны. Для рассматриваемых ретрансляторов скорость медленного режима выбирают в 3-10 раз меньше, чем скорость быстрого режима.
Величину порога ΔУМр определяют, исходя из динамических характеристик контура управления передающей антенны 3 (фиг.1), для рассматриваемого примера ретранслятора величина ΔУМр должна составлять единицы градусов.
Если условие (3) выполняется, то сначала (при ΔУМп>ΔУМр) осуществляют быстрый разворот передающей антенны 3. При ΔУМ≤ΔУМр используют медленный режим. В этом случае проводят операции 36 и 37 (фиг.3).
Величину угла ΔУМп1, отрабатываемого при быстром режиме, определяют из выражения

Время Δt1 быстрого режима находят из формулы (5)

Величину угла ΔУМп2, отрабатываемого при медленном режиме, определяют из выражения

Время Δt2 медленного режима находят из выражения

Коэффициенты КD1 и КD2 отличаются из-за различного влияния погрешностей при изменении напряжения U и времени Δt. Напряжения U1 и U2 должны существенно отличаться, например, U1=25 вольт, U2=5 вольт.
Если для рассматриваемого примера принять угловую скорость быстрого режима 20 град/с и запаздывание в контуре управления 15·10-3 секунд, то динамический порог (динамическая ошибка) - угол, который не будет отработан, составит 18 угловых минут. Это недопустимо большая величина при суммарной погрешности 24 угловые минуты. Для медленного режима с учетом того, что KD1 и КD2 близки по величине, угловая скорость и динамическая ошибка уменьшаются в 5 раз. Эта ошибка существенно меньше допустимой.
Найденные значения Δt1 и Δt2 вводят в память вычислительного устройства 16 (фиг.1).
Если условие (3) не выполняется, то используют только медленный режим. В этом случае проводят операции 38 и 39 (фиг.3). Время этого режима находят из выражения

Найденное значение Δt2 вводят в память вычислительного устройства 16 (фиг.1).
Через фиксированное время после захвата сигнала осуществляют режим 25 (фиг.2) - программное наведение передающей антенны 3 (фиг.1) на абонентскую станцию по углу места.
Фиксированное время может составлять от нескольких единиц до нескольких десятков секунд. Оно зависит от требуемой точности наведения приемной антенны 1 в режиме 24 (фиг.2). Разворот передающей антенны 3 (фиг.1) по углу места из исходного (транспортного) положения на абонентскую станцию проводят при помощи блока 13 по результатам подпрограммы вычислительного устройства 16, приведенной на фиг.3. Если условие (3) не выполняется, то производят медленный разворот передающей антенны 3 (фиг.1). При выполнении условия (3) сначала осуществляют быстрый разворот, а потом через время Δt1 - медленный разворот в течение времени Δt2.
Затем осуществляют режим 26 (фиг.2) - программное наведение передающей антенны 3 (фиг.1) на абонентскую станцию по азимуту. Данный режим выполняют подобно режиму 25 (фиг.2) с использованием аналогичной подпрограммы.
После этого в соответствии с отображенными на устройствах индикации 17 и 18 (фиг.1) рассчитанными значениями угла места и азимута абонентской станции, а также показаниями угломестной и азимутальной шкал 15 и 14 передающей антенны 3, проводят одну или две коррекции положения передающей антенны 3 с доведением до рассчитанных значений углов.
Сначала осуществляют режим 27 (фиг.2) - первая коррекция положения передающей антенны 3 (фиг.1) по углу места. Если разность значений угла места, отображенного на устройстве 17 индикации и снятого с угломестной шкалы 15 передающей антенны 3, превышает допустимую величину, то эту разность вводят в вычислительное устройство 16 с помощью устройства 19 ввода данных. При этом производят запуск подпрограммы, блок-схема которой приведена на фиг.3, начиная с операции 35. При этом возможно выполнение операции 36 или 38.
Затем аналогично осуществляют режим 28 (фиг.2) - первая коррекция положения передающей антенны 3 (фиг.1) по азимуту. При этом берется разность значений азимута, отображенного на устройстве 18 индикации и снятого с азимутальной шкалы 14 передающей антенны 3.
На практике одной коррекции достаточно для обеспечения требуемой точности наведения передающей антенны 3 на абонентскую станцию.
Для рассматриваемого примера задаемся ошибкой программного управления длительностью сигнала 3%. При максимально возможном азимутальном программном угле 180 градусов получаем ошибку программного наведения 324 угловые минуты, а также ошибку первой коррекции около 10 угловых минут, которая является допустимой для рассматриваемого ретранслятора.
Точность программного наведения передающей антенны 3 анализируемых ретрансляторов по углу места значительно выше, чем по азимуту. Это обусловлено меньшим значением программного угла по углу места, а также тем, что точность привязки ретранслятора к плоскости горизонта существенно выше, чем к меридиану.
До момента фиксации передающей антенны 3 возможны ее небольшие уходы из-за возмущений. Поэтому развороты по азимуту, где погрешность больше, проводят ближе к моменту фиксации, т.е. после угломестных разворотов.
Если после выполнения режимов 27 и 28 (фиг.2) погрешности по углу места и азимуту превышают допустимые значения, то осуществляют сначала режим 29 - вторая коррекция положения передающей антенны 3 (фиг.1) по углу места, а потом режим 30 (фиг.2) - вторая коррекция положения передающей антенны 3 (фиг.1) по азимуту. Вторую коррекцию проводят аналогично первой коррекции.
После выполнения режимов коррекции осуществляют режим 31 (фиг.2) - фиксация положения передающей антенны 3 (фиг.1). После этого для снижения энергопотребления снимают питание с аппаратуры управления передающей антенны 3 по углу места и азимуту. После этого осуществляют передачу радиотелевизионного сигнала на абонентскую станцию.
Приведенное описание предлагаемого способа позволяет сделать следующее заключение.
По оценке, за счет упрощения аппаратуры (исключение датчиков углов и устройств отработки сигналов передающей антенны, а также устройства определения меридиана, например магнитного компаса или радиокомпаса, упрощение источников электропитания) стоимость одного комплекта ретранслятора уменьшается на 4000-5000 у.е. Если питание ретранслятора осуществляется от автономного источника, то благодаря снижению энергопотребления существенно снижаются масса, габариты и стоимость этого источника.
За счет упрощения аппаратуры ретранслятора, а также фиксации положения передающей антенны после ее наведения на абонентскую станцию, по оценке, потребляемая при эксплуатации ретранслятора мощность уменьшается на 15-20%.
Предложенный в данном способе метод поиска сигнала позволит сократить время указанной операции в 2-3 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2008 |
|
RU2368077C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОТЕЛЕВИЗИОННОГО СИГНАЛА | 2011 |
|
RU2479923C2 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА | 2007 |
|
RU2328824C1 |
| СПОСОБ НАВЕДЕНИЯ АНТЕНН РЕТРАНСЛЯТОРА | 2006 |
|
RU2368076C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА СВЧ | 2008 |
|
RU2374764C1 |
| СПОСОБ НАВЕДЕНИЯ ПЕРЕДАЮЩЕЙ АНТЕННЫ РЕТРАНСЛЯТОРА НА АБОНЕНТСКУЮ СТАНЦИЮ | 2005 |
|
RU2308157C1 |
| УСТРОЙСТВО СВЧ-СВЯЗИ | 2005 |
|
RU2309542C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2009 |
|
RU2409893C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
Изобретение относится к системам связи и предназначено для ретрансляции радиотелевизионных сигналов. Предложенный способ включает предварительное наведение приемной антенны ретранслятора на источник сигнала путем предварительного разворота приемной антенны по азимуту и углу места до захвата сигнала с ее последующим точным наведением по азимуту и углу места на источник сигнала, а также программное наведение передающей антенны ретранслятора на абонентскую станцию в соответствии с рассчитанными азимутом и углом места. Достигаемый технический результат заключается в упрощении аппаратуры ретранслятора, снижении его энергопотребления, уменьшении массы, а также в сокращении времени поиска сигнала в 2-3 раза. 1 з.п. ф-лы, 3 ил.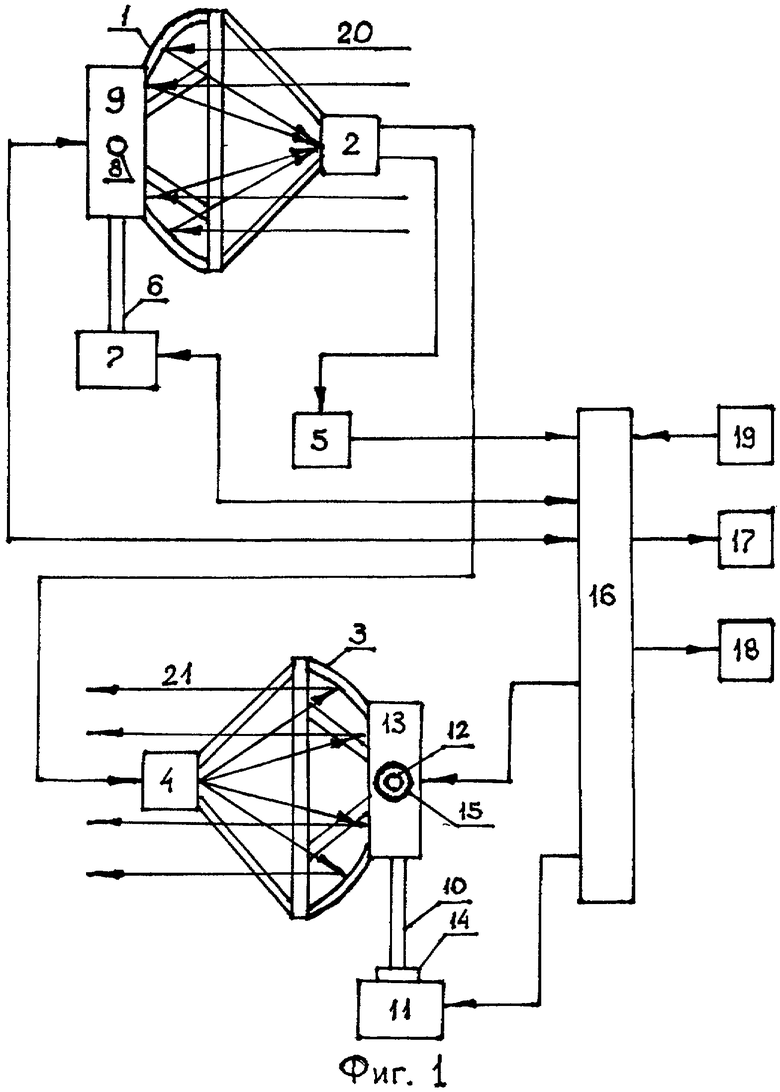
| ФРОЛОВ О.П | |||
| Антенны для земных станций спутниковой связи | |||
| - М.: Радио и связь, 2000, с.260-265 | |||
| RU 96111973 А, 27.09.1998 | |||
| МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА ИНТЕГРАЦИИ И ПЕРЕДАЧИ ДАННЫХ ВИДЕОИНФОРМАЦИОННЫХ УСЛУГ | 2004 |
|
RU2271074C1 |
| Устройство для измерения параметров радиотелевизионной передающей станции | 1973 |
|
SU510811A1 |
| US 6061095 А, 09.05.2000 | |||
| WO 9626607 A1, 29.08.1996 | |||
| Способ сварки труб трением | 1977 |
|
SU721283A1 |

