I
Известны устройства для распознавания изображений, в которых используется блок координатного опроса, например, передающая трубка, блок привязки и усиления, дискретизатор, выход которого присоединен к п параллельно включенным компараторам, имеющим разные уровни срабатывания, выходами, соединенными со схемами совпадений. Однако известные устройства работают по принципу эквиденситометрического измерителя на устанавливаемых уровнях срабатывания компаратора. Такое устройство формирует описание исследуемого изображения в виде совокупности отсчетов по площади, превышающей освещенность изображения по сравнению с заданной, вследствие чего при задаппом динамическом диапазоне чисел в разрядах (отсчетах) информационная емкость описания увеличивается незначительно при увеличении числа отсчетов, необходимых для анализа сложных изображений.
Целью изобретения является расширение возможности распознавания сложных изображений.
Это достигается тем, что выход каждого из компараторов подключен через последовательно соединенные схему совпадения, формирователь сигнала, сумматор к соответствующему входу схемы поразрядного сравнения, другой вход которой соединен с выходом схемы разряда эталонной функции плотности, а выходы через схему возведения в квадрат - к выходному сумматору, подключенному к выходной пороговой схеме, выход которой присоединен через блок тактовой синхронизации к дискретизатору и к каждому из формирователей сигналов. При этом выходная пороговая схема через блок программных уставок соединена со схемами разрядов эталонной функции плотности, а также с блоком привязки и усиления, выход которого через измерительный блок подключен к блоку программных уставок.
Такое выполнение устройства позволяет формировать описание изображения и производить его сравнение с описанием, хранимым в качестве эталонного, по дифференциальной функции плотности, обладающей повышенной информационной емкостью по сравнению с набором прямых эквидепситометрических отсчетов.
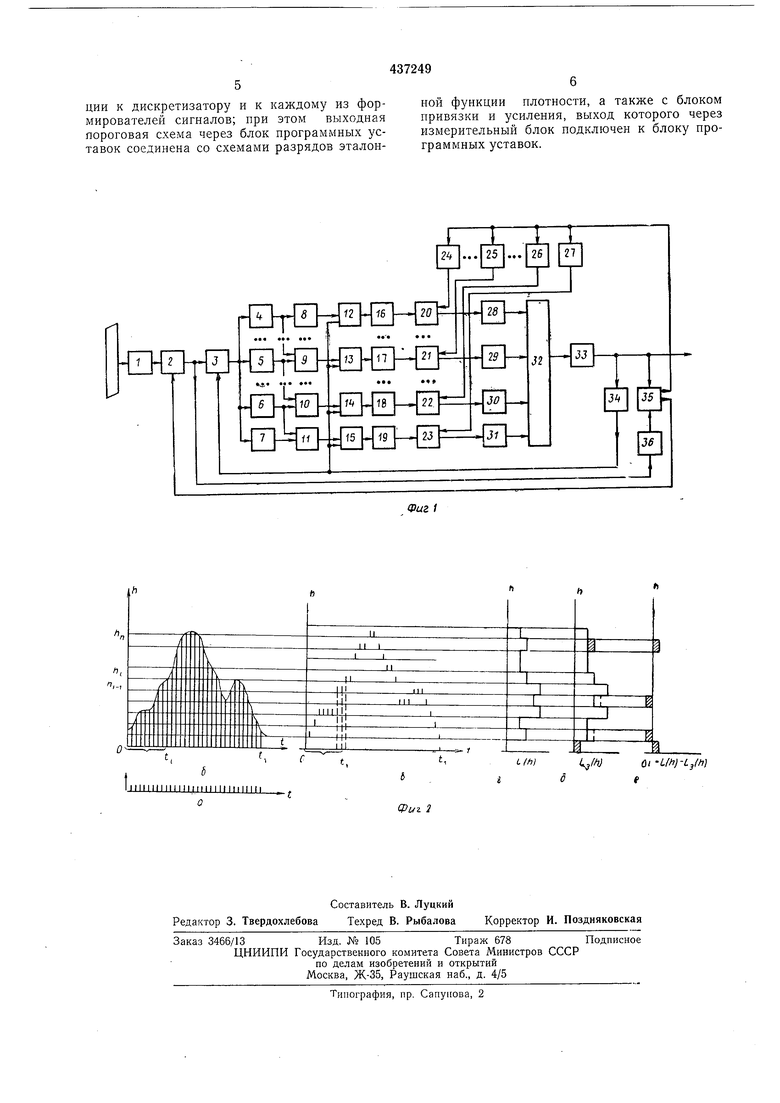
На фиг. 1 приведена блок-схема предлагаемого устройства; на фиг. 2 (а-е) -диаграммы сигналов в трактах устройства.
В схему в.ходит блок 1 координатного опроса; блок 2 привязки и усиления; дискретизатор 3; компаратор 4-7; схема 8-11 совпадения; формирователь 12-15 сигнала; сумматор 16-19; схема 20-23 поразрядного сравнения; схема 24-27 разряда эталонной
функции плотности; схема 28-31 возведения в квадрат; выходной сумматор 32; выходная пороговая схема 33; блок 34 тактовой синхронизации; блок 35 программных уставок и измерительный блок 36..
Устройство для распознавания изображений содержит блок 1 координатного опроса, блок 2 привязки и усиления и дискретизатор 3, подключенный к входам п-го числа компараторов 4-7. Схемы соединения всех компараторов, кроме последнего компаратора 7, идентичны. Каждый из компараторов, например компаратор 6, соединяется со своей схемой 10 совпадения и схемой 11 совпадения, т. е. схемой совпадения следующего за ним по порядку компаратора 7. Схема совпадения 10, в свою очередь, соединена с формирователем 14 сигналов, выход которого через сумматор 17 соединен с входом схемы 22 поразрядного сравнения. Второй вход схемы 22 связан с выходом соответствующей схемы 26, а выход схемы 22 через соответствующую схему 30 подключен к выходному сумматору
32устройства, подключенному к выходной пороговой схеме 33. Выход пороговой схемы
33(помимо того, что он служит общим выходом устройства) подключен также через блок тактовой синхронизации 34 к дискретизатору 3 и к каждому из формирователей 12-15 сигнала. Кроме того, выход пороговой схемы 33 через блок программных уставок 35 соединен со входами схем разряда эталонной функции плотности, а также - с блоком 2 привязки и усиления, выход которого через измерительный блок 36 подключен к блоку 35 программных уставок.
Устройство работает следующим образом. Блок 1 осуществляет координатно-временной опрос яркостного рельефа в плоскости изображения, при котором на вход блока привязки и усиления подается сигнал изображения. Усиленный сигнал с выхода блока 2 поступает на дискретизатор 3. Регулировкой усиления, осуществляемой блоком программных уставок, обеспечивается привязка уровней и требуемый размах сигнала на входе дискретизатора 3, контролируемый измерительным блоком 36.
Дискретизатор 3, управляемый тактовыми синхронизирующими импульсами блока 34 (см. фиг. 2а) выдает последовательность тактированных импульсов (см. фиг. 26), огибающая которых следует непрерывному входному сигналу дискретизатора (т. е. сигналу изображения). На фиг. 26 эта огибающая проведена тонкой линией на интервале времени развертки О-ti; вертикальные линии на этом рисунке обозначают последовательность выходных импульсов дискретизатора. Указапные импульсы поступают на входы п компараторов 4-7 (см. фиг. 1).
Компараторы 4-7 имеют различающиеся пороги срабатывания /ij, hz, ... /li-i, hi... hn (CM. фиг. 26) и сортируют по амнлитудам поступающие на их входы сигналы, распределяя их по соответствующим каналам с помощью схем совпадения 8-11. Если амплитуда сигнала, поступающего в момент ti, находится в пределах , в i-м канале на выходе схемы совпадения 8-11 появится сигнал и формирователь этого канала (на фиг. 1 формирователи 12-15) выдает «единичный сигнал. Сигналы на выходах формирователей приводятся на фиг. 2в.
10 Сумматоры 16-19 подсчитывают число «единичных сигналов каждый в своем канале за время координатно-временного опроса, формируя разряды функции плотности, используемой для описания изображения (см.
15 фиг. 2г). Выходные сигналы сумматоров 16-19, используемые в качестве разрядных сигналов функции плотности,, очевидно представляют собой разряды амплитудной гистограммы распределения импульсных сигналов,
0 поступающих на вход компараторов за время опроса.
Поразрядное сравнение функций плотности исследуемого L(h) (см. фиг. 2г) и эталонного La(h) (см. фиг. 2д) изображений производится на схемах поразрядного сравнения 20-23. На входы каждой из этих схем поступают соответствующие сигналы разрядов эталонной функции плотности от схем 24-27. Разностные сигналы приведены на фиг. 2е, которые
0 возводятся в квадрат схемами 28-31 и поступают на выходной сумматор 32.
Выходной сигнал сумматора 32 сравнивается по величине с сигналом выходной пороговой схемы 33. Выход г следней используется
5 в качестве ответа о совпадении или несовпадении дифференциальных функций плотности исследуемого и эталонного изображений. Допустимая среднеквадратпческая погрешность задается величиной порога пороговой схе0 мы 33.
Предмет изобретения.
5 Устройство для распознавания изображений, содержащее последовательно соединенные блок координатного опроса, например передающую трубку, блок привязки и усиления, дискретизатор, выход которого присоединен к п параллельно включенным компараторам, имеющим разные уровни срабатывания, выходами, соединенными со схемами совпадений, отличающееся тем, что, с целью расширения возможности распознавания сложных изображений, выход каждого из компараторов подключен через последовательно соединенные схему совпадения, формирователь сигнала, сумматор к соответствующему входу схемы поразрядного сравпеиия,
0 Другой вход которой соединен с выходом схемы разряда эталонной функции плотности, а выходы через схему возведения в квадрат- к выходному сумматору, подключенному к выходной пороговой схеме, выход которой
присоединен через блок тактовой синхронизации к дискретизатору и к каждому из формирователей сигналов; при этом выходная пороговая схема через блок программных уставок соединена со схемами разрядов эталонной функции плотности, а также с блоком привязки и усиления, выход которого через измерительный блок подключен к блоку программных уставок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания изображений и устройство для его осуществления | 1983 |
|
SU1238269A1 |
| Устройство для контроля межслойных соединений печатных плат | 1986 |
|
SU1323987A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Система автоматического контроля качества псевдоожижения в печи кипящего слоя | 1982 |
|
SU1076475A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1043692A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1506460A1 |
iд ui-Llh)-Ljth t
