1
Изобретение относится к области автоматизации производственных процессов и может быть использовано для автоматической загрузки технологических машин холодно-штамповочного и других Производств.
Известны автоматические бункерные захватно-ориентирующие устройства, содержащие исполнительные органы, приводимые во враш,ение с переменной скоростью вокруг общей оси от вращающегося с постоянной скоростью приводного звена посредством передаточного механизма с соосно расположенными ведомым звеном, связанным с исполнительными органами устройства, «и двумя ведущими звеньями, одно из которых получает постоянное вращение, а другое - возвратно-ловоротное с помощью преобразующего механизма.
Однако известные устройства не обеспечивают требуемого диапазона изменения скорости вращения исполнительных органов, в результате чего не повышается их производительность, которая необходима для загрузки быстродействующих технологических машин, в частности холодно штамповочных автоматов.
Для повышения производительности в предлагаемом устройстве одно из ведущих звеньев и ведомое звено передаточного механизма выполнены в виде зубчатых колес, а другое ведущее звено - в виде поводка с установленными на нем с возможностью вращения паразитными шестернями, которые находятся в зацеплении с упомянутыми зубчатыми колесаси и которыми снабжено устройство.
На чертеже схематически изображено предлагаемое устройство.
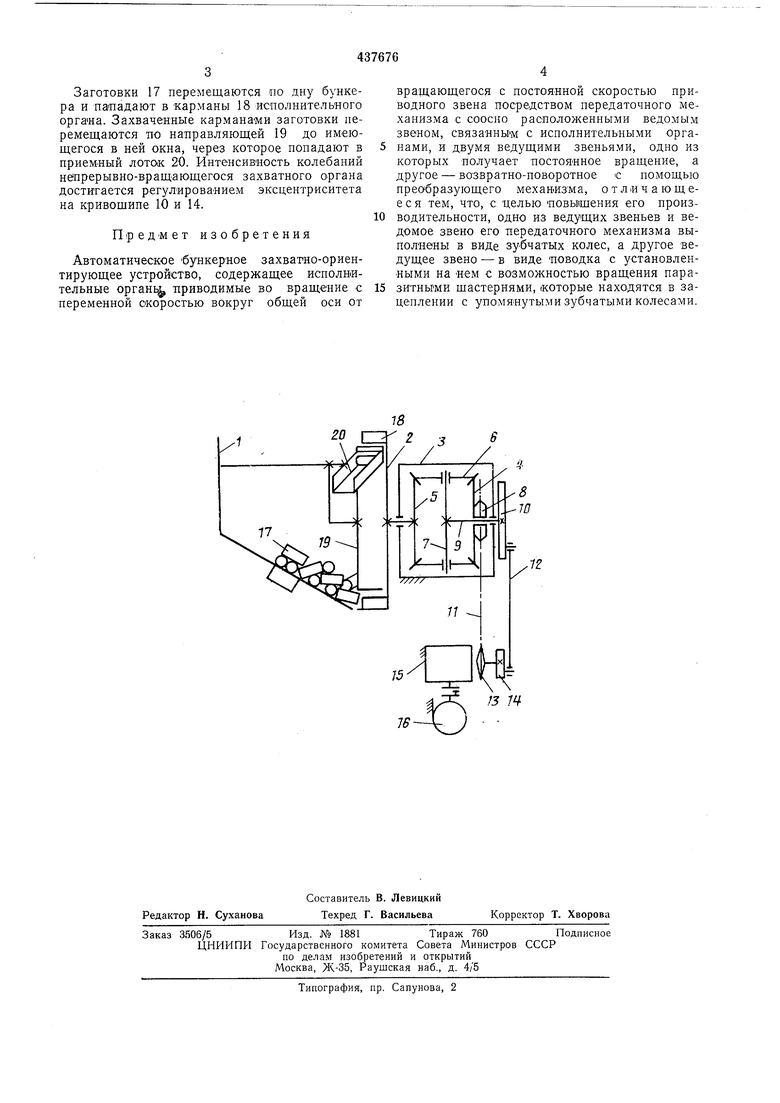
Устройство содержит бункер 1, вращающийся исполнительный орган 2, приводимый в движение с помощью передаточного механизма, выполненного в виде помещенной в корпусе 3 зубчатой планетарной передачи. Последняя состоит из конических шестерен 4 и 5, сателлитов 6 и поводка 7. К шестерне 4 крепится звездочка 8, а на
входном валу 9 - кривошип 10, соединенные соответственноцепью 11 и пштуном 12 со звездочкой 13 и кривошипом 14, установленными на выходном валу редуктора 15, получающего движение от электродвигателя 16.
Шестерня 5 жестко связана с исполнительным органом.
При вращении звездочки 13 и кривошипа 14 вращается звездочка в и колеблется кривошип 10. Коническая шестерня 4 передает вращение
звездочки 8 «а сателлиты.
Вал 9 передает колебания кривошипа 10 на поводок. Вращательное и колебательное движения сателлитов суммируются и передаются через коническую шестерню 5 исполнителыюму органу.
Заготовки 17 перемещаются по дну бункера и пападают в карманы 18 исполнительного органа. Захваченные карманами заготовки перемещаются по направляющей 19 до имеющегося в ней окна, через которое попадают в прием-ный лотО(К 20. Интенсивность колебаний непрерывно-враЩающегося захватного органа достигается регулированием эксцентриситета на кривощипе 10 и 14.
Предмет изобретения
Автоматическое бункерное захвагно-ориентирующее устройство, содержащее исполнительные органь приводимые во вращение с переменной скоростью вокруг общей оси от
вращающегося с постоянной скоростью приводного звена посредством передаточного механизма с соосно расположенными ведомым звеном, связанным с исполнительными органами, и двумя ведущими звеньями, одно из которых получает постоянное вращение, а другое - возвратно-поворотное с помощью преобразующего механизма, отличающееся тем, что, с целью повышения его производительности, одно из ведущих звеньев и ведомое звено его передаточного механизма выполнены в виде зубчатых колес, а другое ведущее звено - в виде поводка с установленными на «ем с возможностью вращения паразитными щастернями, которые находятся в зацеплении с упомянутыми зубчатыми колесами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2066651C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| Инерционно-импульсная передача | 1989 |
|
SU1739151A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| Привод зевообразующего механизма ткацкого станка | 1981 |
|
SU1144620A3 |
15f ««
