В авторском свидетельстве №24720 описано устройство для автоматического управления рулем судна, состоящее из подвешенного на кардановом подвесе цилиндра, внутри которого на оси, сверху снабженной свободно насаженной стрелкой, насажен перпендикулярно к ней ряд магнитов N-S. После установки стрелки в диаметральной плоскости судна, во время нахождения последнего на курсе, и сцепления ее помощью гайки с осью, ролик, расположенный в хвостовой части стрелки, при сходе судна с курса перекатывается по дуговым контактам и посредством прикрепленной к стрелке пластинки включает в цепь одно из реле, управляющих вращением электрического двигателя руля.
В предлагаемом видоизменении устройства в качестве стабилизатора вместо магнитов N-S применен жироскоп, ось вращения ротора которого, вращаемого электрическим током, может быть устанавливаема на движущемся судне параллельно оси вращения земли, пользуясь при этом истинным курсом судна и широтой места, что обусловит почти неподвижное состояние оси жироскопа в пространстве на движущемся, меняющем свою широту и качающемся судне.
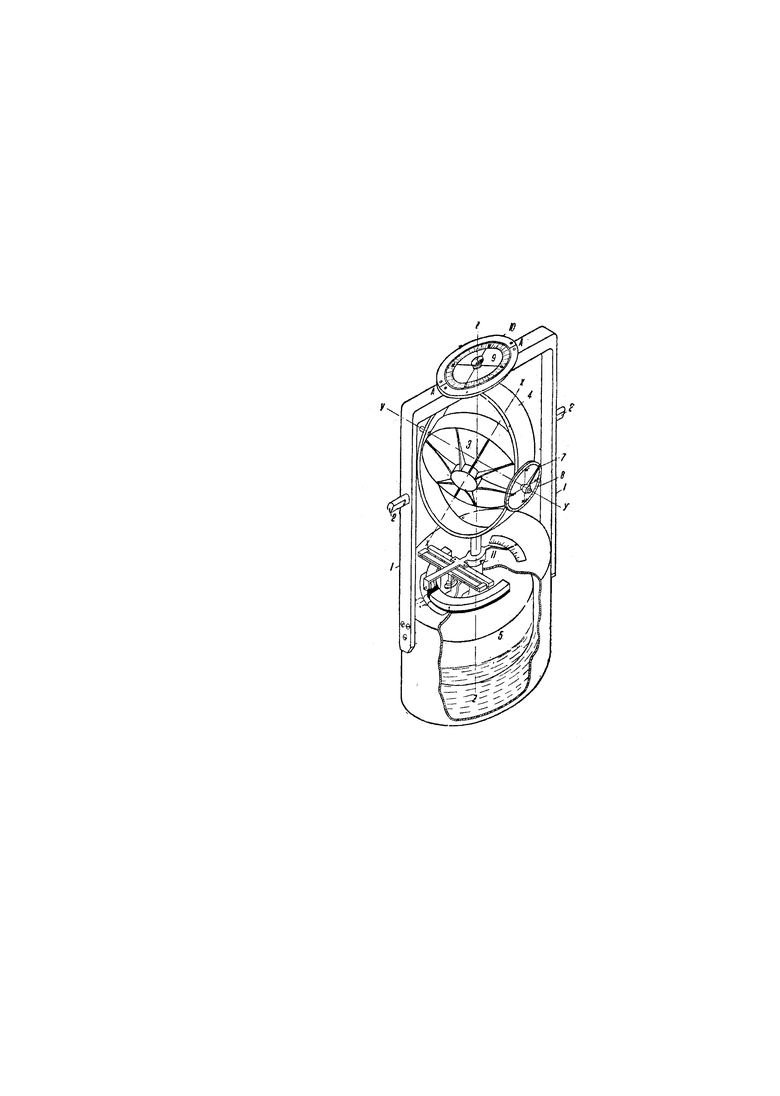
На чертеже изображен перспективный вид устройства для автоматического управления рулем судна.
В раму 1, подвешенную в кардановом подвесе на цапфах 2, вставляется жироскоп, вращаемый в камере 3, направление оси которого совпадает с геометрической осью камеры. Камера вращается на оси YY в кольце 4, опирающемся на поплавок 5, плавающий в сосуде с ртутью или маслом, прикрепленным к низу рамы 1.
Таким образом кольцо 4 с камерой и ротором жироскопа может свободно вращаться около оси ZZ.
На оси вращения камеры 3 прикреплена стрелка 7, скользящая, при изменении положения камеры, около оси YY по циферблату 8, связанному с кольцом 4. На верхней оси вращения кольца 4 прикреплена картушка 9, диаметральная линия которой N-S перпендикулярна к плоскости кольца и лежит в одной плоскости с осью ротора жироскопа. При изменении положения кольца 4 около оси ZZ картушка 9 скользит в кольце 10, связанном с рамой, на котором нанесены индексы А, А, указывающие диаметральную плоскость судна.
На нижней шейке оси вращения кольца 4 надета стрелка такой же следящей контактной системы, какая описана в авторском свидетельстве №24720. Стрелка может быть поворачиваема на оси кольца, устанавливаема в диаметральной плоскости судна и зажата неподвижно по отношению к кольцу 4 винтом 11.
Чтобы поляризировать данный жироскоп, поступают так: когда ротор жироскопа получит необходимое число оборотов, то соответствующим прецессионным движением, после того, как судно установлено на курс по магнитному компасу, жироскоп устанавливается так, чтобы ось вращения ротора была отклонена от диаметральной плоскости судна на угол, равный истинному курсу судна, на что укажет диаметральная линия N-S картушки 9 в отношении индексов А, А. Этот процесс направит ось XX жироскопа на истинный меридиан с той точностью, с какой дана общая поправка компаса на судне, известная при выходе судна из порта с точностью долей градуса. Далее, другим соответствующим прецесионным движением, пользуясь циферблатом 8 и стрелкой 7, северный полюс оси XX жироскопа подымается в северном полушарии над горизонтом, а в южном полушарии опускается под горизонт на число градусов широты места судна, известной на судне с точностью до минуты.
Таким образом ось XX жироскопа будет направлена на полюс мира или вернее будет иметь незначительное, незатухающее колебание около полюса мира в течение суток, не имеющее практического значения при управлении судном.
Жироскоп после такой установки не будет подвержен влиянию вращения земли, перемене судном широты, качке судна и не будет иметь балистических девиаций. Он будет неподвижен по отношению к точкам горизонта, и только ось жироскопа кажущимся движением будет подыматься над горизонтом или опускаться с переменной широты места.
Предлагаемое устройство явится не только стабилизатором для автоматического управления судном, но и компасом, после того, как ось XX будет установлена параллельно оси вращения земли и в своих показаниях истинного курса судна превзойдет существующие механические компасы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компас | 1973 |
|
SU468087A1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| Прибор для измерения кривизны буровых скважин | 1930 |
|
SU24366A1 |
| Курсогоризонт | 1990 |
|
SU1781543A1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| Способ определения динамической погрешности магнитного компаса с системой коррекции от качки и устройство для его реализации | 2022 |
|
RU2783479C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Компас | 1934 |
|
SU49302A1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
Видоизменение устройства для автоматического управления рулем судна по авторскому свидетельству №24720, отличающееся тем, что вместо магнитов N-S в качестве стабилизатора применен жироскоп.
