Изобретение относится к области измерительной техники, в частности к испытательному оборудованию, и может быть использовано для оценки в лабораторных условиях динамической погрешности магнитных компасов (МК), оснащённых системой коррекции при их работе на различных широтах при воздействии качки. Система коррекции МК предложена, например в [патент РФ №2688900].
Известен способ определения динамической погрешности МК, вызванной качкой, и устройство для его реализации [патент РФ №2718691]. Согласно этому способу котелок магнитного компаса в кардановом подвесе, устанавливается на одноосный стенд, воспроизводящий угловые колебания, относительно горизонтальной оси в заданном спектре частот, при этом на котелок компаса дополнительно воздействует постоянное магнитное поле с задаваемыми вектором и напряженностью, соответствующим условиям эксплуатации. Для определения динамической погрешности задается одноосная качка карданова подвеса с котелком МК, а значение динамической погрешности определяется расчетом значения среднеквадратического отклонения переменной составляющей отклонений магнитного курса от первоначально заданного положения. К недостаткам способа относится отсутствие возможности формирования дополнительного влияния судовых магнитных сил на МК, изменяющихся от качки, которые определяются как изменение креновой погрешности МК, вызванной качкой и приводят к дополнительному отклонению картушки МК по углу рыскания.
Наиболее близким по технической сущности является одноосный стенд для оценки амплитудно-частотной характеристики системы коррекции магнитного компаса [патент РФ №2757536]. Стенд позволяет воспроизводить угловые колебания МК по оси рыскания c заданной частотой. При этом ось разворота стенда расположена на некотором плече, относительно оси разворота картушки МК, а на основании стенда, вблизи котелка закреплены два постоянных магнита таким образом, что при развороте платформы с котелком, последний приближается к одному из них. Такая конструкция стенда позволяет приложить к магнитной системе картушки МК дополнительный магнитный момент, что приводит к дополнительному развороту картушки. Указанный дополнительный магнитный момент и имитирует влияние судовых магнитных сил, вызванных качкой. При дальнейшей обработке информации от датчика угла стенда и датчика угла разворота картушки МК оценивается АЧХ системы коррекции, компенсирующей дополнительную погрешность МК, вызванной качкой.
Данное устройство принято за прототип предлагаемого изобретения.
К недостаткам прототипа, не позволяющим использовать его для оценки в лабораторных условиях динамической погрешности МК, оснащённых системой коррекции при их работе на качке в условиях различных широт, относится невозможность воспроизведения колебаний МК с заданным спектром частот и отсутствие соответствующего воздействия на котелок МК магнитного поля с параметрами, соответствующими географическим условиям эксплуатации, а также отсутствие оценки среднеквадратического отклонения переменной составляющей отклонений магнитного курса от первоначально заданного направления, вырабатываемого МК. Влияние судовых магнитных сил, вызванных качкой, является особенно важным для оценки динамической погрешности МК с системой коррекции в высоких широтах при воздействии на него малого значения горизонтальной и большого значения вертикальной составляющих магнитного поля Земли. Следовательно, прототип не позволяет воспроизводить условия, приближенные к реальным условиям эксплуатации МК, и, соответственно, определять динамическую погрешность измерения магнитного курса на качке при работе в условиях магнитного поля с заданными параметрами.
Решаемая техническая проблема - совершенствование стендового оборудования для определения динамической погрешности МК, оснащённого системой коррекции, в условиях его эксплуатации.
Достигаемый технический результат - определение значения среднеквадратического отклонения (СКО) динамической погрешности измерения магнитного курса с помощью МК, оснащённого системой коррекции, на лабораторном стенде, воспроизводящем влияние на картушку МК параметров вектора напряжённости магнитного поля, характерного для различных географическим условий эксплуатации в условиях изменения от качки магнитных сил от судовой стали (далее - судовые магнитные силы).
Реализация предлагаемого способа и устройства на его основе достигается следующим образом. Исследуемый котелок МК устанавливается на стенд, способный воспроизводить колебания по углам рыскания в спектре частот в условиях магнитного поля с заданными параметрами. Угловые одноосные колебания задаются со спектром, соответствующим условиям эксплуатации, а направление вектора и значение напряжённости магнитного поля соответствуют выбранным координатам места судна. Производится запись сигнала МК, поступающего с выхода прибора управления, оснащённого системой коррекции. Сигнал представляет собой совокупность постоянного сигнала магнитного курса и переменного значения рыскания, в котором присутствует динамическая погрешность. Кроме того, производится запись сигнала с датчика угла разворота стенда (колебаний стенда). С использованием двух записанных реализаций сигналов: - от МК и стенда, строятся графики спектральной плотности колебаний по рысканию стенда и переменной составляющей выходного сигнала МК. По разности значений графиков спектральной плотности [Г.Корн, Т.Корн. Справочник по математике для научных работников и инженеров // М.: - Наука - 1974 - 832 с.] определяется спектральная плотность динамической погрешности МК на качке, а затем значения её дисперсии D = σ2 и СКО - σ.
Таким образом, предлагаемый способ заключается в следующем:
1. Котелок МК устанавливается в стенд для воспроизведения реальных условий эксплуатации прибора.
2. Задается вектор магнитного поля, необходимой напряженности и направления.
3. Стендом воспроизводятся одноосные колебания по рысканию со спектральной плотностью, соответствующей качке реального судна на заданном волнении.
4. Записываются реализации измеренных значений выходного сигналов курса МК и колебаний стенда за время экспериментальных исследований.
5. По переменной составляющей записанных реализаций курса МК и колебаний стенда с помощью компьютерной программы строятся графики спектральной плотности этих процессов.
6. Из графика спектральной плотности колебаний стенда вычитаются ординаты графика спектральной плотности колебаний выходного сигнала МК.
7. На основе полученных вычислений строится график спектральной плотности динамической погрешности МК.
8. Вычисляются значения дисперсии D и среднеквадратического отклонения σ динамической погрешности МК. Дисперсия динамической погрешности определится как площадь под графиком спектральной плотности динамической погрешности SП(f) и определится выражением  . Из указанной формулы определится и СКО динамической погрешности.
. Из указанной формулы определится и СКО динамической погрешности.
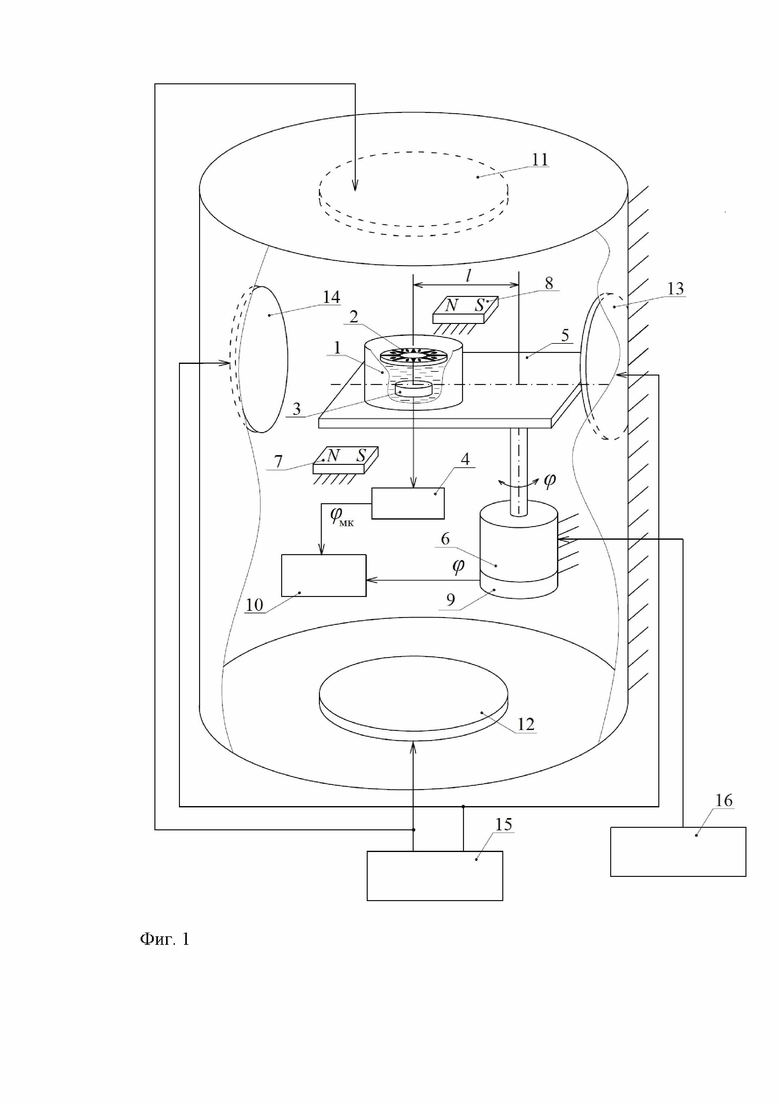
Предлагаемое для реализации способа устройство стенда (фиг.1) состоит из котелка МК 1, внутри которого находится картушка с чувствительной подвижной магнитной системой 2, оснащённой датчиком угла картушки 3. Котелок МК 1 подключён к прибору управления, оснащённому системой коррекции 4. Котелок МК 1 установлен на платформе одноосного стенда 5, которая разворачивается с помощью привода переменного тока 6. Формирование дополнительных магнитных сил, действующих на котелок МК производится с помощью постоянных магнитов 7 и 8, установленных на корпусе стенда. На оси привода переменного тока 6 установлен датчик угла разворота стенда 9, сигнал которого вместе с сигналом от прибора управления, оснащённого системой коррекции 4, подается на персональный компьютер 10. В стенде присутствуют две горизонтальные 11 и 12 и две вертикальные 13 и 14 катушки. Эти катушки питаются от управляемого источник тока 15. Сигнал рыскания стенда формируется блоком управления приводом, оснащённым персональным компьютером 16.
На фиг. 1 приведены обозначения:
1 – котелок МК,
2 – картушка МК с чувствительной подвижной магнитной системой,
3 – датчик угла картушки,
4 – прибор управления, оснащённый системой коррекции,
5 – платформа одноосного стенда,
6 – привод переменного тока,
7, 8 – постоянные магниты,
9 – датчик угла разворота стенда,
10 – персональный компьютер,
11, 12 - горизонтальные катушки,
13, 14 - вертикальные катушки,
15 - управляемый источник тока,
16 - блок управления приводом, оснащённый персональным компьютером.
ϕ - угол рыскания стенда.
ϕМК – сигнал МК на выходе системы коррекции прибора управления МК.
Функционирование предлагаемого устройства осуществляется следующим образом.
Котелок 1 установлен на платформе 5 на некотором плече l, относительно оси вращения платформы 5. Угол поворота картушки 2 измеряется датчиком угла картушки 3 и передаётся на прибор управления, оснащённый системой коррекции 4. Система коррекции, например, из [патент РФ №2688900]. Платформа 5 совершает угловые колебания с задаваемым спектром частот рыскания. Колебания обеспечиваются работой привода переменного тока 6 и формируются программой персонального компьютера блока управления приводом 16. При этом на неподвижной части стенда установлены постоянные магниты 7 и 8, которые при приближении к ним котелка формируют на чувствительной подвижной магнитной системе картушки 2 дополнительный магнитный момент, имитирующий влияние судовых магнитных сил, вызванных качкой. Пары горизонтальных 11, 12 и вертикальных 13, 14 катушек, подключённых к управляемому источнику тока 15, формируют на котелке постоянное магнитное поле с напряжённостью и вектором, соответствующим географическим условиям эксплуатации. При развороте стенда на угол рыскания φ, измеряемый датчиком угла разворота стенда 9, котелок 1 приближается к одному из постоянных магнитов, в результате чего чувствительная подвижная магнитная система картушки 2 разворачивается на угол
ϕК = ϕ + Δϕ, где Δϕ – угол отклонения магнитной системы, обусловленный действием постоянных магнитов 7 и 8 и пропорциональный погрешности МК от качки. В том случае, если с помощью катушек 11 - 14 создать магнитное поле с необходимыми характеристиками и задать закон изменения углов рыскания φ стенда в соответствии с задаваемым спектром качки с помощью управляемого привода 16, то при угловых колебаниях стенда датчик угла 3 картушки будет вырабатывать сигнал с дополнительно сформированной погрешностью, возникающей из-за качки судна в заданном спектре частот в заданной географической точке. Указанная погрешность будет компенсирована в приборе управления, оснащённого системой коррекции, по заданному алгоритму, например, предложенному в [патент РФ №2688900]. Cигнал с прибора управления φМК будет передан в персональный компьютер 10, который выполняет расчёт спектральной плотности входного сигнала Sφ(f) от датчика 9 и строит график этой спектральной плотности. График спектральной плотности выходного сигнала Sφмк(f) с выхода прибора управления с системой коррекции МК, имеющего в составе динамическую погрешность, также будет рассчитан в персональном компьютере 10. Здесь f - диапазон частот. Разность этих графиков спектральных плотностей будет определять график спектральной плотности динамической погрешности МК в условиях его эксплуатации SП(f)=Sφ(f)- Sφмк(f). Дисперсия динамической погрешности определится как площадь под графиком спектральной плотности динамической погрешности SП(f) и определится выражением . Из указанной формулы определится и СКО динамической погрешности.
Традиционно экспериментальное определение динамической погрешности приборов, в частности МК, производится путём воспроизведения стендом заданной частоты и оценки погрешности на этой частоте. Далее частота изменяется, причём эксперимент проводится во всей области рабочих частот. Воспроизведение колебаний, определяемых спектральной плотностью качки при воздействии магнитного поля с заданными параметрами, позволяет сократить время испытаний в связи с отсутствием необходимости выполнения исследований на каждой частоте. Кроме того, в случае задания спектра качки конкретного судна, заявляемые способ и устройство (стенд) повышают достоверность определения динамической погрешности МК в конкретных условиях его эксплуатации.
Экспериментальные исследования способа и устройства производились с использованием МК "Азимут КМ-05Д", котелок которого был установлен на платформу стенда (фиг.1). При воспроизведении стендом углов рыскания с максимальной амплитудой 10° в диапазоне периодов от 3 до 140 секунд в условиях вектора магнитного поля, соответствующего Санкт-Петербургу, были получены значения СКО динамической погрешности МК с системой коррекции, составившей 0,3°, что соответствует расчётным значениям погрешности МК с системой коррекции. Таким образом, заявленный технический результат можно считать достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный стенд для оценки амплитудно-частотной характеристики системы коррекции магнитного компаса | 2021 |
|
RU2757536C1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| Способ коррекции магнитного курса судна | 2024 |
|
RU2839828C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| МАГНИТНЫЙ КОМПАС С ДИСТАНЦИОННОЙ ТЕЛЕМЕТРИЧЕСКОЙ ПЕРЕДАЧЕЙ ИЗОБРАЖЕНИЯ ШКАЛЫ КУРСА | 2010 |
|
RU2441201C1 |
| ЦИФРОВАЯ МАГНИТНАЯ КОМПАСНАЯ СИСТЕМА С КОРРЕКЦИЕЙ | 2020 |
|
RU2769922C2 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| УНИВЕРСАЛЬНЫЙ МОРСКОЙ МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2085846C1 |
Группа изобретений относится к области измерительной техники. Исследуемый магнитный компас (МК) устанавливают на стенд, способный воспроизводить колебания по углам рыскания в спектре частот, соответствующем условиям эксплуатации МК и в условиях магнитного поля с заданными параметрами. Осуществляют запись сигнала МК, поступающего с выхода прибора управления, оснащённого системой коррекции. Сигнал представляет собой совокупность постоянного сигнала магнитного курса и переменного значения рыскания, в котором присутствует динамическая погрешность. Осуществляют запись сигнала с датчика угла разворота стенда. По записанным реализациям строят графики спектральной плотности. По разности значений графиков определяют спектральную плотность динамической погрешности МК на качке, а затем значения её дисперсии и среднеквадратическое отклонение (СКО). Технический результат – повышение достоверности определения динамической погрешности МК в конкретных условиях его эксплуатации. 2 н.п. ф-лы, 1 ил.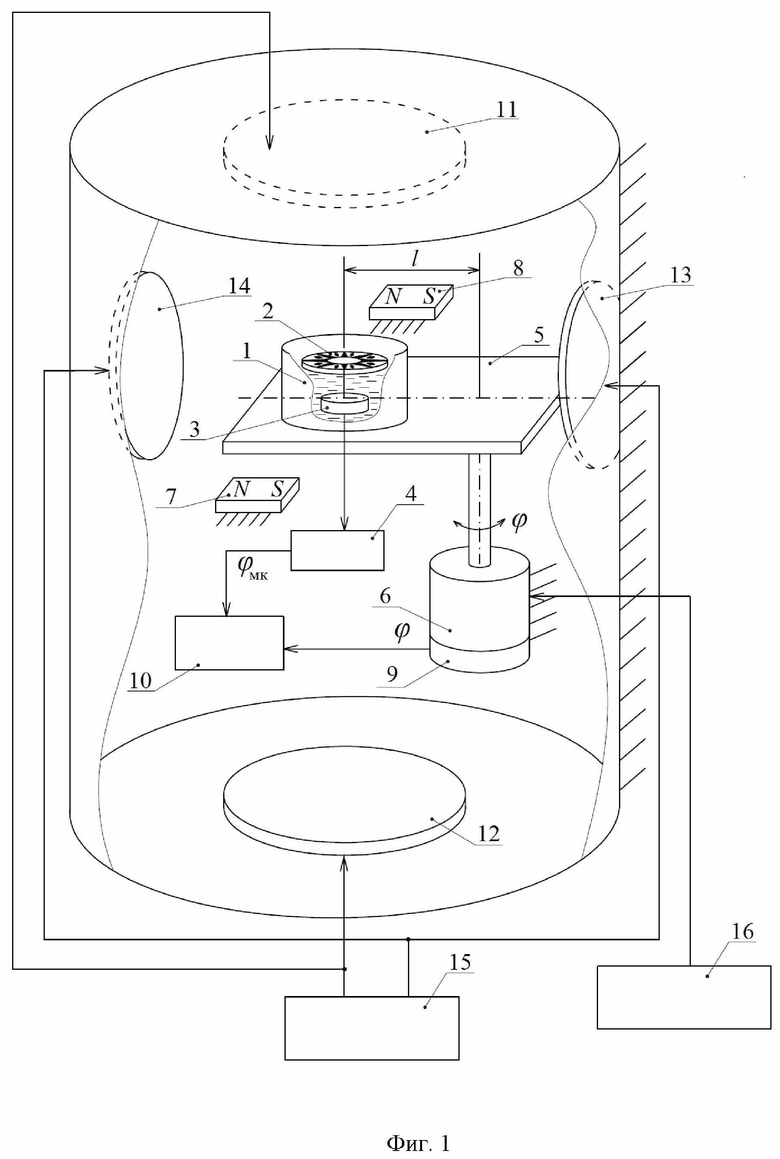
1. Способ определения динамической погрешности магнитного компаса с системой коррекции от качки, заключающийся в том, что при колебаниях по рысканию котелка магнитного компаса (МК), установленного на стенде, на него воздействует дополнительный магнитный момент, имитирующий влияние судовых магнитных сил, вызванных качкой, отличающийся тем, что колебания воспроизводятся в заданном спектре частот, соответствующем спектру качки, на котелок дополнительно воздействует магнитное поле с задаваемыми вектором и напряжённостью, соответствующими условиям эксплуатации компаса, для определения динамической погрешности выполняют измерения углов рыскания МК, оснащенного системой коррекции, и колебаний стенда, по которым вычисляют спектральные плотности этих процессов, определяют спектральную плотность динамической погрешности МК и вычисляют ее среднее квадратическое отклонение.
2. Устройство для реализации способа определения динамической погрешности магнитного компаса (МК) с системой коррекции от качки, содержащее платформу, на которую устанавливается котелок МК, ось разворота картушки МК, расположенную на плече относительно оси вращения платформы таким образом, что при развороте платформы котелок приближается к одному из двух постоянных магнитов, при этом каждый из которых закреплён неподвижно и прикладывает дополнительную магнитную силу к магнитной системе картушки МК, что приводит к её дополнительному развороту, имитирующему влияние судовых магнитных сил, вызванных качкой, отличающееся тем, что платформа с котелком МК выполняет колебания с заданным спектром частот, задаваемым с помощью компьютера с блоком управления, при этом котелок МК помещают в постоянное магнитное поле с вектором и напряжённостью, соответствующими условиям эксплуатации, генерируемое двумя парами катушек, расположенных симметрично относительно котелка и связанных с управляемым источником тока, при этом показания рыскания МК и воспроизводимого стендом углового разворота регистрируются компьютером и обрабатываются для вычисления значений динамической погрешности и ее среднего квадратического отклонения.
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Устройство для определения полукруговой девиации компаса | 1977 |
|
SU742709A1 |
| КОАКСИАЛЬНЫЙ СОЕДИНИТЕЛЬ | 0 |
|
SU231635A1 |

