1
Изобретение относится к промышленному транспорту, а именно к пневмо-вакуумным перегружателям для сыпучих материалов.
Известны пневмо-вакуумные перегружатели для сыпучих материалов, включающие вакуум-систему, всасывающий трубопровод и подвижную ферму с установленными на ней двумя перегрузочными бункерами периодического действия, снабженными датчиками уровня материала и щиберными заслонками.
Целью изобретения является упрощение конструкции и повыщение надежности работы перегружателя.
Это достигается тем, что он снабжен блокирующими датчики уровня материала с щиберными заслонками и вакуум-системой золотником управления и тремя пневмоцилиндрами, щток одного из которых соединен тягой с щиберными заслонками, а два других связаны соответственно с переключателями всасывающего трубопровода и вакуум-системы.
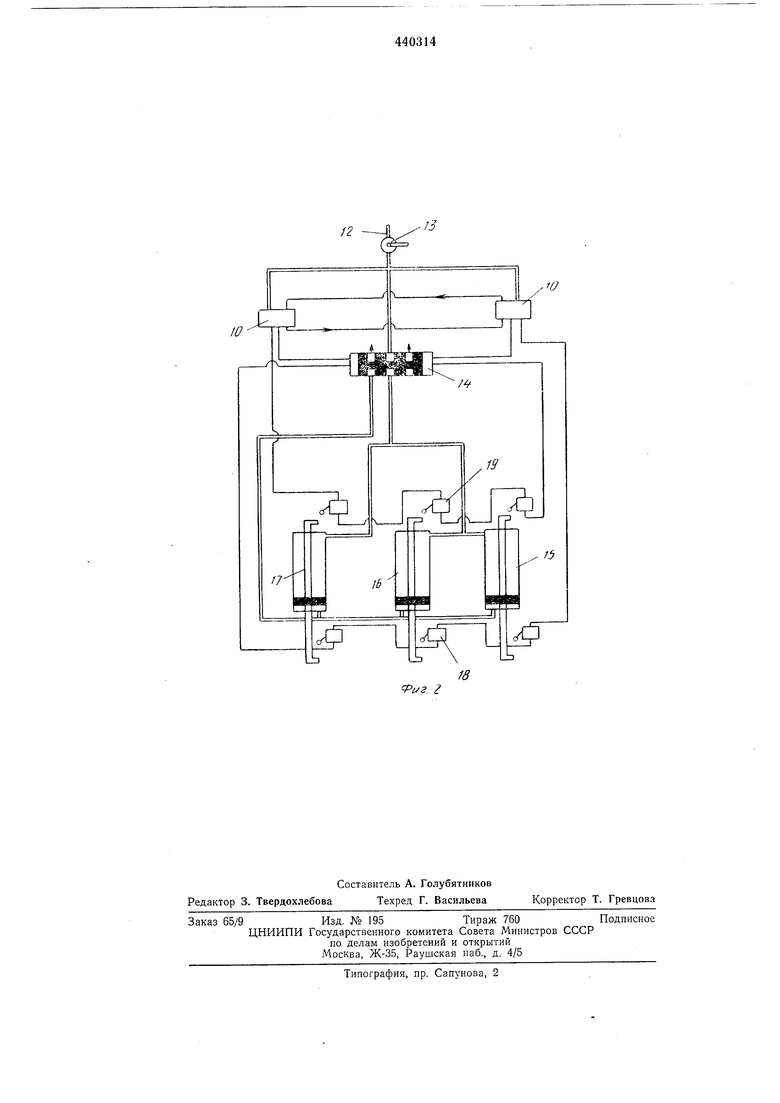
На фиг. 1 изображен предлагаемый перегружатель в общем виде; на фиг. 2 - схема автоматического управления работы перегружателя.
На подвижной ферме 1 установлены два перегрузочных бункера 2 периодического действия, которые соединены соответственно с течкой транспортных средств 3 и вакуум-системой 4 посредством всасывающего трубопровода 5 с переключателем 6 и фильтров 7, и переключателя 8. Ферма опирается на катки 9. Перегрузочные бункеры 2 снабжены датчиками уровня материала 10 и щиберными заслонками 11. Схема автоматического управления работой перегружателя включает подводящую пневмомагистраль 12 с краном 13, датчики уровня материала 10, золотник управления 14, пневмоцилиндры 15, 16, 17 и концевые выключатели 18 и 19.
При этом щток пневмоцилиндра 15 жестко соединен тягой с щиберными заслонками 11, а пневмоцилиндры 16 и 17 связаны соответственно с переключателями 6 и 8.
Работа по выгрузке сыпучего материала из транспортных средств и его складированию осуществляется следующим образом. Ферму 1 с перегрузочными бункерами 2 устанавливают в ту часть хранилища, где необходимо разместить выгружаемый материал. После этого всасывающий трубопровод 5 подсоединяют к течке вагона, затем поворачивают кран 13 на подводящей пневмомагистрали 12 и подают сжатый воздух в систему автоматического управления. Сжатый воздух одновременно приводит во вращение датчики уровня материала 10 в обоих бункерах 2. При этом щиберная заслонка 11 в одном из бункеров 2 открыта, а в другом закрыта. В бункер 2 с
закрытой шиберной заслонкой 11 по всасывающему трубопроводу 5 под действием вакуума засасывается сыпучий материал.
При полной загрузке бункера 2 датчик уровня материала 10 затормаживается, и сжатый воздух подается в золотник управления 14, переключая его. При переключении золотника 14 сжатый воздух подается в полость пневмоцилиндров 15, 16, 17. Поршень пневмоцилиндра 15, перемещаясь из одного крайнего положения в другое, закрывает шиберную заслонку 11 порожнего бункера 2 и открывает щиберную заслонку 11 наполненного бункера 2. Одновременно порщни 16 и 17 своими щтоками переводят переключатели 6 и 8 в положение, при котором сыпучий материал поступает в бункер 2 с закрытой щиберной заслонкой 11. В результате, наполненный бункер 2 разгружается, а пустой наполняется.
Последующие циклы автоматически повторяются до полной разгрузки транспортных средств. Концевые выключатели 18 и 19 фиксируют крайнее положение порщней со штоками пневмоцилиндров 15, 16, 17, обеспечивая предохранение автоматической системы управления от возможных повреждений.
Предмет изобретения
Пневмо-вакуумный перегружатель для сыпучих материалов, включающий вакуум-систему, всасывающий трубопровод и подвижную ферму с установленными на ней перегрузочными бункерами периодического действия, снабженными датчиками уровня материала и шиберными заслонками, отличающийся тем, что, с целью упрощения конструкции и повышения надежности работы перегружателя, он снабжен блокирующими датчики уровня материала с шиберными заслонками и вакуум-системой золотником управления и тремя пневмоцилиндрами, щток одного
из которых соединен тягой с шиберными заслонками, а два других связаны соответственно с переключателями всасывающего трубопровода и вакуум-системы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузчик сыпучего полимерного материала | 1977 |
|
SU737225A1 |
| Бункерное устройство | 1981 |
|
SU1028563A1 |
| Всасывающая установка для пневматического транспортирования сыпучего материала | 1990 |
|
SU1794830A1 |
| УСТРОЙСТВО ДЛЯ ОБЪЕМНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2011 |
|
RU2464535C1 |
| Устройство регулирования подачи корма мобильного кормораздатчика | 1981 |
|
SU959708A1 |
| СИСТЕМА ГЕРМЕТИЧНОГО КОНДИЦИОНИРОВАНИЯ ЗОЛЬНОГО ОСТАТКА ОТ СЖИГАНИЯ РАДИОАКТИВНЫХ ОТХОДОВ | 2024 |
|
RU2825890C1 |
| Шиберный затвор | 1987 |
|
SU1521677A1 |
| Пневмовибрационный дозатор сыпучих материалов | 1981 |
|
SU979861A1 |
| Устройство для распределения подаваемого самотеком сыпучего матариала | 1959 |
|
SU123075A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ФАСОВКИ ПОРОХОВ | 2019 |
|
RU2707201C1 |