1
Изобретение относится к рыбной промышленности, точнее к определению линейных и механических характеристик рыб.
Известен способ определения коэффициента трения рыб путем взвешивания рыбы, размещения ее на наклонной плоскости из исследуемого материала и определение времени скольжения рыбы по поверхности.
Недостатком известного способа является необходимость точного определения времени проскальзывания рыбой заданного расстояния, т. к. в формулу определения коэффициента трения время входит в квадрате. Получить же точное время ручным секундомером невозможно из-за погрешности его показаний, которая составляет ± 0,1 сек. Эта погрешность увеличивается при отсечке времени экспериментатором и зависит от реакции последнего.
Цель изобретения - увеличение точности определения параметров рыбы, определение зависимости коэффициента трения от скорости скольжения и изменения коэффициента по мере изменения положения рыбы на плоскости и возможности определения точки приложения равнодействующей сил трения.
Это достигается тем, что после взвешивания на рыбу наносят две метки в районе центра тяжести и анального отверстия, на поверхность наносят отсчетные риски, снимают
на кинопленку процесс скольжения рыбы по поверхности, проектируют заснятый процесс на экран, измеряют расстояние от меток на рыбе до отсчетных рисок на поверхности и определяют параметры по формулам.
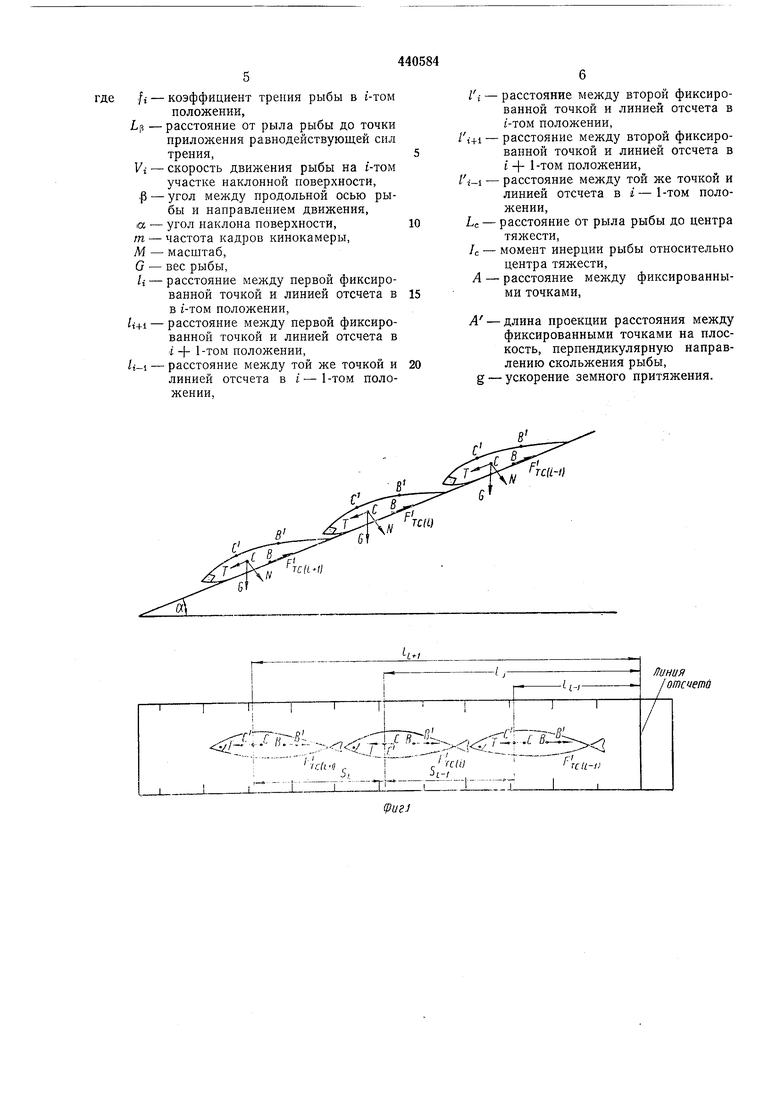
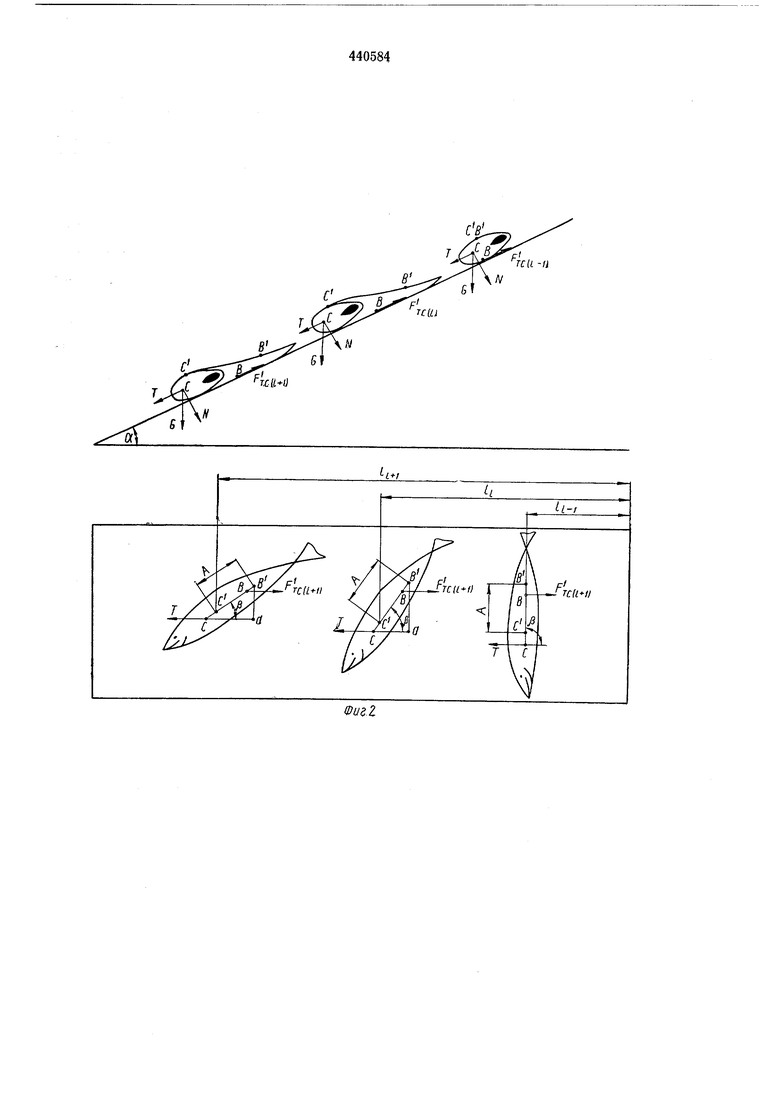
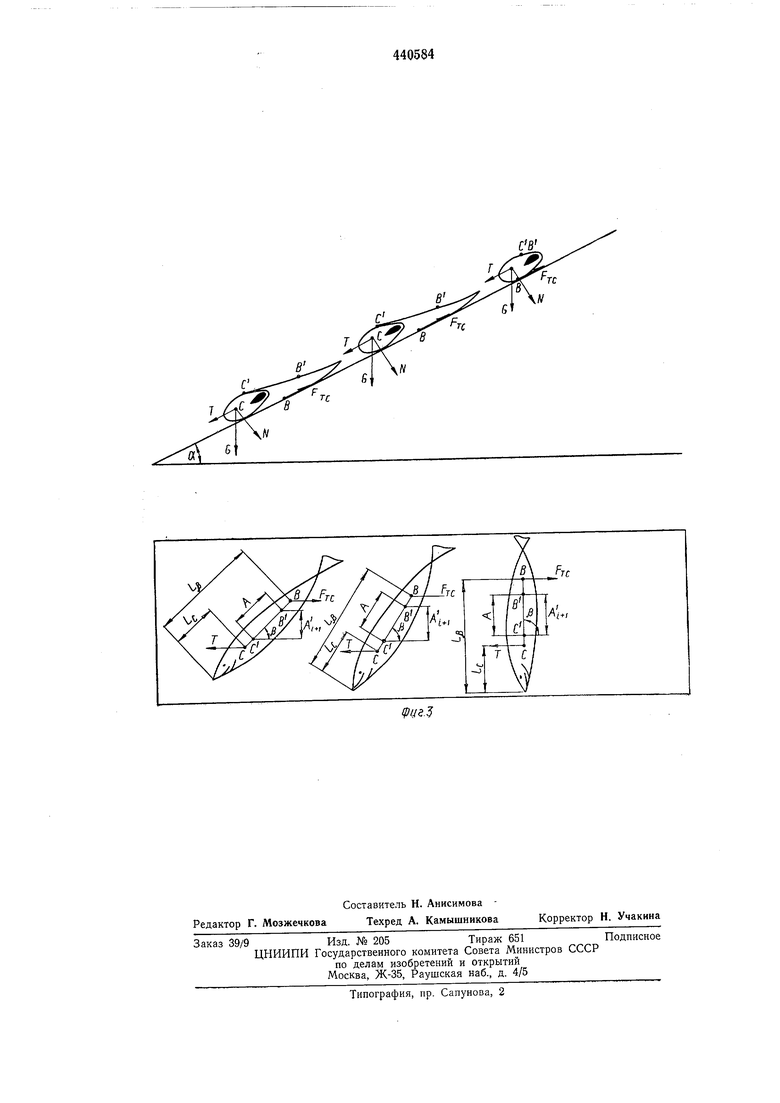
На фиг. 1 и 2 представлены схемы скольжения рыбы вниз по наклонной плоскости, соответственно головой вперед и боком; на фиг. 3 - схема определения точки приложения равнодействующей силы трения.
Способ определения коэффициента трения рыб заключается в следующем.
На плоскость с исследуемым материалом наносят отсчетные линии, а на рыбу - две точки, из которых первую С наносят в районе центра тяжести, а вторую В - в районе анального отверстия.
Предварительно взвешенную рыбу с нанесенными на нее точками опускают на наклонную плоскость с исследуемым материалом головой вниз, хвостовым плавником вниз или боком. Процесс скольжения снимают на кинопленку. Скорость съемки устанавливают в зависимости от требуемой точности. Чем больше скорость съемки, тем меньший участок пути проходит рыба за единицу времени, определяемого частотой кадров, и тем меньше разница в скорости прохождения рыбой различных участков пути, что позволяет принимать
скорость прохождения участков за единицу времени как постоянную.
Кинокамера выполнена подвижной по отношению к плоскости и движется со скоростью, равной или близкой к скорости скольжения рыбы по плоскости. Расстояние /, пройденное рыбой за время одного кинокадра, определяется отстоянием точек С или В от линии отсчета в двух соседних кадрах.
Заснятый процесс скольжения рыбы по плоскости проектируют на экран, измеряют расстояние точки С от линии отсчета и определяют коэффициент трения рыбы для i-того положения по формуле:
2тШ(/,+, + /,1-2/г) fl .cosa :
fi - коэффициент трения рыбы в t-oM
где
положении,
т - частота кадров кинокамеры, g - ускорение земного притяжения, М - масштаб, /i+i - отстояние точки С от линии отсчеli-li-i-lt+lt-l
arccos{
2/.-и A
L,+
/j-G-coso-sIn arccos AJ
где LC - расстояние от рыла рыбы до центра тяжести,
/с - момент инерции рыбы относительно центра тяжести,
- отстояние от линии отсчета до точки В в X + 1-том положении, G - вес рыбы,
А - длина проекции расстояния между фиксированными точками на плоскость, перпендикулярную направлению скольжения рыбы, Ii-i - отстояние от линии отсчета до точки 5 в t- 1-том положении.
Таким образом, предлагаемым способом определяют коэффициенты трения рыбы при скольжении ее по плоскости в любом положенин, в любой промежуток времени и при любой скорости. Кроме того, предлагаемым способом определяют одновременно точку приложения равнодействующей сил трения. f, llarccos ( А-4 +
Vi-m()M, arccos ( Ж,
та в i -+- 1-том положении, /1 - отстояние той же точки от линии отсчета в i-TOM положении, /, - отстояние точки от линии отсчета
в t- 1-том положении.
Средняя скорость рыбы на -Ё-ТОМ участке определяется по формуле
Vt m()M.
Угол р между продольной осью рыбы и направлением движения рыбы, характеризующий положение рыбы на плоскости, определяется по формуле
йТССОВ - -- -М,
А /
где А
между фиксированными
растояние точками,
I/ - отстояние от линии отсчета до второй фиксированной точки В. Расстояние L от рыла рыбы до точки приложения равнодействующей сил трения определяют по формуле
i).
-li-ll+l +
1-Ч
arccos
A
Ij-lj
A
Предмет изобретения
Способ определения коэффициента трения рыб путем взвешивания рыбы, размещения ее на наклонной поверхности из исследуемого материала и определения времени скольжения рыбы по поверхности, отличающийс я тем, что, с целью повышения точности определения параметров, возможности определения зависимости коэффициента трения от скорости скольжения и изменения положения рыбы на плоскости и возможности определения точки приложения равнодействующей сил трения, после взвешивания на рыбу наносят две метки в районе центра тяжести и анального отверстия, на поверхность наносят отсчетные риски, снимают на киноленту процесс скольжения рыбы по поверхности, проектируют заснятый процесс на экран, измеряют расстояние от меток на рыбе до отсчетных рисок на поверхности и определяют параметры по формулам: (li i+li l-2li) :tgah-l-ll+ll/j-G-cosa-sln arccosЛ1 g-COSa lЛ%. - f{+i + 1Л -arccos I- il Л A )
е /г - коэффициент трения рыбы в J-том
положении,
LP -расстояние от рыла рыбы до точки приложения равнодействующей сил трения,
Vi - скорость движения рыбы на i-том участке наклонной поверхности,
.р - угол между продольной осью рыбы и направлением движения,
а - угол наклона поверхности,
т - частота кадров кинокамеры,
М - масштаб,
G - вес рыбы,
/i - расстояние между первой фиксированной точкой и линией отсчета в в i-TOM положении,
/i+i - расстояние между первой фиксированной точкой и линией отсчета в i + 1-том положении, /1-1 - расстояние между той же точкой и линией отсчета в i--1-том положении.
6
/; - расстояние между второй фиксированной точкой и линией отсчета в /-том положении,
/i+i - расстояние между второй фиксированной точкой и линией отсчета в i + 1-том положении,
- расстояние между той же точкой и линией отсчета в i-1-том положении, LC - расстояние от рыла рыбы до центра
тяжести, /с - момент инерции рыбы относительно
центра тяжести,
А - расстояние между фиксированными точками,
А - длина проекции расстояния между фиксированными точками на плоскость, перпендикулярную направлению скольжения рыбы, g - ускорение земного притяжения.
ГСП -It
С
св
iDl
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТИРОВАНИЯ РЫБЫ | 1972 |
|
SU342594A1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ПОВОРОТЕ | 2009 |
|
RU2407032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ СКОЛЬЖЕНИЯ | 2021 |
|
RU2778049C1 |
| Способ перемещения груза на платформе | 1988 |
|
SU1615081A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ МЕЖДУ ДВУМЯ ПОДВИЖНЫМИ ОБРАЗЦАМИ | 2013 |
|
RU2545073C2 |
| Устройство для определения динамических наклонений морского судна на качке | 1987 |
|
SU1525461A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ ОТНОСИТЕЛЬНО ВРАЩАЮЩЕЙСЯ СФЕРИЧЕСКОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2565359C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2010 |
|
RU2444000C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ НЕПРЕРЫВНО ТЕКУЩЕГО ГРАНУЛИРОВАННОГО ИЛИ ПОРОШКООБРАЗНОГО МАТЕРИАЛА | 1992 |
|
RU2110775C1 |
| Прибор для измерения остойчивости | 1990 |
|
SU1815654A1 |