Изобретение относится к навигации, а именно к системам определения положения объекта без использования отражения или вторичного излучения, и может быть использовано для расширения возможностей систем круиз-контроля и предупреждения водителей транспортных средств о нарушении скоростного режима движения.
Известен способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве [1], относящийся к системам технического зрения (СТЗ). Способ основан на трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (X, Y, Z) и пересекаются в ее начале (фиг.1).
Используя, например, два ОЛБ с системами отсчета координат внутри каждого, можно определить координаты точки А путем решения следующей системы уравнений:




где αxj - угловая координата точки А, отсчитанная от оси х в j-м ОЛБ; αyj - угловая координата точки А, отсчитанная от оси у в j-м ОЛБ; dj - расстояние до начала координат от передней узловой точки фотообъектива j-го ОЛБ.
Известен наиболее близкий по технической сущности к изобретению способ, описанный в [1, 2], относящийся к системам дистанционного определения координат подвижных объектов - системам технического зрения. Способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве основан на использовании стереоскопической схемы геометрического типа, состоящей из двух одинаковых фотообъективов 01 и 02 с параллельными оптическими осями, разнесенных на известное расстояние, и двух матричных фотодетекторов. Главные точки объективов расположены на одной линии (линии базы), перпендикулярной к оптическим осям (фиг.2). Если выбрать начало координат О в середине линии базы длиной В, то измеряя координаты изображений x1 и x2 произвольной точки А и их разность p=x1-x2, называемую линейным параллаксом, можно определить координату  точки А. Две другие координаты (на фиг.2 не показаны) определяются в соответствии с выражениями:
точки А. Две другие координаты (на фиг.2 не показаны) определяются в соответствии с выражениями:

где у=у1-у2 - координата изображений точки по оси Y, перпендикулярной к плоскости чертежа; Z - ось системы координат, направленная от середины базы О к плоскости предметов.
Недостатком описанных аналога и прототипа является отсутствие возможности определения допустимой скорости движения транспортного средства на повороте дороги.
Технической задачей изобретения является контроль скорости движения транспортного средства на повороте. Технический результат изобретения заключается в определении радиуса кривизны предстоящего участка дороги, текущей и допустимой скорости движения транспортного средства по условиям опрокидывания и скольжения, что достигается за счет использования высокоточного измерителя первичной навигационной информации - двух оптико-локационных блоков и вычислителя.
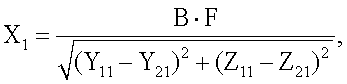
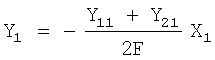
Единый технический результат изобретения достигается тем, что в способе контроля скорости транспортного средства на повороте, основанном на трехмерной локации точки с помощью оптико-локационных блоков, каждый из которых содержит фотообъектив и матричный фотоприемник, а также вычислителя, в вычислителе осуществляют обработку оцифрованных изображений поверхности автодороги, снимаемых с двух разнесенных оптико-локационных блоков, установленных на транспортном средстве, выбирают в поле изображения три идентичные точки в одноименных вершинах штриховых линий разметки определяют координаты этих точек на фотоматрицах (Ym1, Zm1), (Ym2, Zm2), (Ym3, Zm3), где m - номер фотоматрицы, а второй индекс l=1, 2, 3 - номер точки B1, В2, В3 соответственно, вычисляют координаты точек B1, В2, В3 в системе координат OXYZ, связанной с транспортным средством,
где F - фокусное расстояние первого и второго фотообъективов, м;
В - расстояние между фотоматрицами, м,
вычисляют радиус изгиба автодороги, м

где 
задают условия движения, определяющие коэффициент трения сцепления колес транспортного средства о покрытие дороги, которые включают в себя погодные условия, характер покрытия автодороги, качества резины, вычисляют допустимую скорость транспортного средства на повороте по условию опрокидывания:
где g - ускорение свободного падения, м/с2, hцт - высота центра тяжести автомобиля, м, lб - колесная база автомобиля, м,
вычисляют допустимую скорость автомобиля на повороте по условиям сцепления
где  - коэффициент трения сцепления колес транспортного средства о покрытие дороги, значения индекса i=1,2,3 зависят от погодных условий, соответственно сухо, дождь, обледенение, значения индекса j=1,2,3, зависят от покрытия автодороги, соответственно асфальт, бетон, гравий, значения индекса k=1,2,3, зависят от качества резины, соответственно летняя, зимняя, шипованная,
- коэффициент трения сцепления колес транспортного средства о покрытие дороги, значения индекса i=1,2,3 зависят от погодных условий, соответственно сухо, дождь, обледенение, значения индекса j=1,2,3, зависят от покрытия автодороги, соответственно асфальт, бетон, гравий, значения индекса k=1,2,3, зависят от качества резины, соответственно летняя, зимняя, шипованная,
определяют текущую и допустимую скорости транспортного средства на повороте

где V - текущая скорость транспортного средства, Vдоп - допустимая скорость транспортного средства на повороте, минимальная из двух величин Vдоп.с и Vдоп.о, X1,n - координата идентичной точки в tn момент времени с номером n=1,2,3…,
осуществляют контроль превышения текущей скорости транспортного средства над допустимой скоростью транспортного средства на повороте
V≤Vдоп.о.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
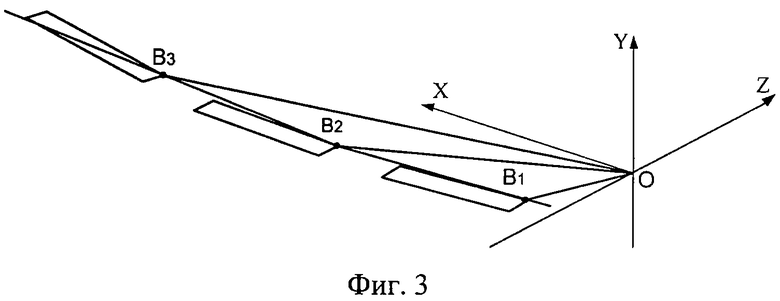
выбор в поле изображения трех идентичных точек в одноименных углах фрагментов линии дорожной разметки (фиг.3);
вычисление координат трех идентичных точек в системе координат OXYZ, связанной с транспортным средством;
задание условий движения, определяющих коэффициент трения сцепления колес транспортного средства о покрытие дороги;
вычисление допустимой скорости транспортного средства на повороте по условию опрокидывания;
вычисление допустимой скорости транспортного средства на повороте по условиям сцепления;
определение текущей и допустимой скорости транспортного средства на повороте;
контроль превышения текущей скорости транспортного средства над допустимой скоростью транспортного средства на повороте.
На фиг.1 приведена схема трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (аналог).
На фиг.2 изображена стереоскопическая схема геометрического типа (прототип).
На фиг.3 показана пунктирная линия разметки автодороги и система координат, связанная с транспортным средством.
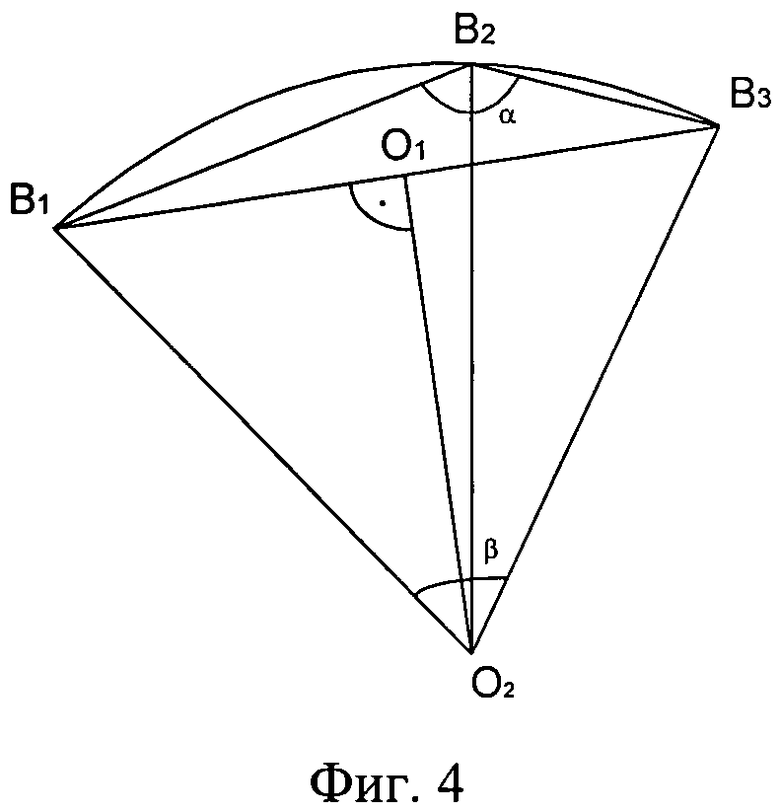
На фиг.4 показан способ определения радиуса кривизны автодороги.
Описание способа контроля скорости транспортного средства на повороте автодороги
Известно, что превышение допустимой скорости на повороте автодороги является причиной множества катастроф, но решение задачи об обоснованном выборе скорости выполнения такого маневра на практике всегда подменяется туманными рассуждениями об ограничении скорости. Решим задачу об определении допустимой скорости транспортного средства на повороте в два этапа. На первом этапе рассмотрим способ определения радиуса изгиба автодороги по наблюдаемым линиям дорожной разметки. На втором этапе получим условие безопасного преодоления поворота по условиям опрокидывания и скольжения автомобиля.
Пусть транспортное средство имеет два разнесенных оптических блока с параллельными оптическими осями, связанных с вычислителем, который по изображениям, поступающим с фотоматриц, решает задачу определения координат точек фотографируемого ландшафта дороги.
Выберем в поле изображения дорожного полотна три разнесенные идентичные точки B1, В2, В3, лежащие на линии дорожной разметки (фиг.3). Координаты этих точек обозначим (Ym1, Zm1), (Ym2, Zm2), (Ym3, Zm3), где m - номер фотоматрицы, а второй индекс l=1, 2, 3 - номер точки B1, В2, В3 соответственно.
Выбор точек в поле изображения может осуществляться, например, по контурам штриховых линий разметки методом оконтуривания /1/. Эти идентичные точки должны быть выбраны в одноименных вершинах штриховых линий разметки.
Вычислим координаты точек B1, В2, В3 в системе координат, связанной с автомобилем:
где F - фокусное расстояние первого и второго фотообъективов, м;
В - расстояние между фотоматрицами, м.
Угол α между векторами  и
и  найдем из известного выражения для скалярного произведения векторов и ,
найдем из известного выражения для скалярного произведения векторов и ,

где 

Радиус окружности найдем из треугольника O2O1B1 (фиг.4), поскольку 2π-β=2α, то sin α=sin β/2, а следовательно,
Подставим в это соотношение выражения для B1B3 и для sinα, получим:
Для решения задачи об определении допустимой скорости на повороте рассмотрим силы, действующие на автомобиль в процессе поворота (фиг.5).
Будем полагать, что поверхность дороги совпадает с горизонтальной плоскостью, поэтому вектор силы тяжести автомобиля Р, приложенный к его центру тяжести О, совпадает с вертикалью, а вектор центростремительной силы F параллелен плоскости горизонта. Положение равнодействующей этих сил вектора G определяет возможность опрокидывания автомобиля, если точка В лежит внутри отрезка АС, то опрокидывание не произойдет. Величина отрезка АС представляет собой половину колесной базы автомобиля lб. Тогда условие опрокидывания автомобиля имеет вид:
или
где Vдоп.о - допустимая скорость автомобиля на повороте по условию опрокидывания, g - ускорение свободного падения, m - масса автомобиля, ОА - высота центра тяжести автомобиля.
Тогда условие неопрокидывания автомобиля будет иметь вид:

где V - текущее значение скорости автомобиля.
Скорость автомобиля V может быть получена от датчика скорости - спидометра, но и СТЗ позволяет решать эту задачу совершенно автономно. Поскольку непрерывно происходит определение координат Xk,n, Yk,n, Zk,n точек поверхности дорожного полотна, то скорость автомобиля можно вычислить по следующей формуле:
где Xk,n - координата k-й точки (фиг.3) в n-й момент времени tn.
Сигнал о превышении скорости может быть передан водителю либо использован системой круиз-контроля для автоматического поддержания безопасной скорости на повороте.
Рассмотренный механизм опрокидывания автомобиля на повороте не является единственным источником опасности, следует рассмотреть также возможность возникновения поперечного скольжения колес (юза). Это явление возникает, когда поперечная сила (центростремительная) превышает силу сцепления колеса с дорожным покрытием, что выражается следующим соотношением:
где  - коэффициент трения сцепления колес о покрытие автодороги.
- коэффициент трения сцепления колес о покрытие автодороги.
После сокращения левой и правой частей равенства на массу получим:
где Vдоп.с - допустимая скорость автомобиля на повороте по условиям сцепления.
Условие отсутствия скольжения на повороте будет иметь вид:

Величина скорости V автомобиля измеряется посредством СТЗ, а вот коэффициент трения Ктр принимает не вполне определенные значения, в зависимости от погодных условий, характера дорожного покрытия и качества резины (летняя, зимняя, шипованная). Поэтому для практического использования последнего равенства необходимо экспериментально определить значения коэффициента трения в различных случаях, соответствующих значениям индексов i, j, k. Значениям индекса i=1,2,3 соответствуют погодные условия, соответственно сухо, дождь, обледенение. Значениям индекса j=1,2,3 соответствуют покрытия автодороги, соответственно асфальт, бетон, гравий. Значениям индекса k=1,2,3 соответствуют качества резины, соответственно летняя, зимняя, шипованная.
Все эти признаки устанавливаются водителем вручную в зависимости от условий движения, но возможна и частичная автоматизация, например индекс погоды может устанавливаться от дополнительного датчика обледенения, широко применяемого в авиации, датчиков температуры и влажности. Следует также иметь в виду, что последнее условие будет давать на практике тем лучшие результаты, чем более детально (в более широком диапазоне условий вождения) будут определены значения . Эти условия могут быть как расширены, так и ограничены любым числом факторов.
Таким образом, объединим условия (1) и (2) путем выбора

где Vдоп - минимальная из двух величин Vдоп.с и Vдоп.о.
Обобщенное условие безопасного преодоления изгиба дороги будет иметь вид:
V≤Vдоп.
Источники информации
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - c.168-176.
2. Патент РФ на изобретение №2275652, кл. G01S /16, опубл. 10.06.2006, бюл. 200734 (прототип).
Изобретение относится к системам, устанавливаемым на транспортных средствах, в которых используют трехмерную локацию точек, внешних относительно объекта, например поверхности автодороги, а именно к системам определения положения объекта без использования отражения или вторичного излучения. Способ заключается в измерении координат трех идентичных точек элементов пунктирной линии дорожной разметки, выбранных в поле изображения автодороги, вычисляется радиус изгиба автодороги и текущая скорость транспортного средства, осуществляется ввод условий дорожного движения, определяющих трение, определяется допустимая скорость транспортного средства на повороте по условиям скольжения и опрокидывания, результат сравнения текущей скорости транспортного средства с его допустимым значением используется для оповещения водителя о превышении скорости на повороте либо автоматического регулирования скорости из условий безопасности движения. Достигаемый технический результат изобретения - контроль скорости движения транспортного средства на повороте. 4 ил.
Способ контроля скорости транспортного средства на повороте, заключающийся в определении углов-пеленгов источников излучения с помощью оптико-локационных блоков, каждый из которых содержит фотообъектив и матричный фотоприемник, а также вычислителя, отличающийся тем, что в вычислителе осуществляют обработку оцифрованных изображений поверхности автодороги, снимаемых с двух разнесенных оптико-локационных блоков, установленных на транспортном средстве, выбирают в поле изображения три идентичные точки, в одноименных вершинах штриховых линий разметки, определяют координаты этих точек на фотоматрицах (Ym1, Zm1), (Ym2,Zm2), (Ym3, Zm3), где m - номер фотоматрицы, а второй индекс l=1, 2, 3 - номер точки B1, B2, В3 соответственно, вычисляют координаты точек B1, В2, В3 в системе координат OXYZ, связанной с транспортным средством
 ,
,  ,
,
где F - фокусное расстояние первого и второго фотообъективов, м;
В - расстояние между фотоматрицами, м,
вычисляют радиус изгиба автодороги, м
 ,
,
 ,
,
задают условия движения, определяющие коэффициент трения сцепления колес транспортного средства о покрытие дороги, которые включают в себя погодные условия, характер покрытия автодороги, качества резины, вычисляют допустимую скорость транспортного средства на развороте по условию опрокидывания
 м/с,
м/с,
где g - ускорение свободного падения, м/с2;
hцт - высота центра тяжести автомобиля, м;
lб - колесная база автомобиля, м,
вычисляют допустимую скорость автомобиля на развороте по условиям сцепления
 м/с,
м/с,
где Kijk тp - коэффициент трения сцепления колес транспортного средства о покрытие дороги, значения индекса i=1, 2, 3 зависят от погодных условий, соответственно сухо, дождь, обледенение, значения индекса j=1, 2, 3 зависят от покрытия автодороги, соответственно асфальт, бетон, гравий, значения индекса k=1, 2, 3 зависят от качества резины, соответственно летняя, зимняя, шипованная, определяют текущую и допустимую скорости транспортного средства на развороте


где V - текущая скорость транспортного средства;
Vдоп - допустимая скорость транспортного средства на развороте, минимальная из двух величин Vдоп.с и Vдоп.о; X1n - координата идентичной точки в tn момент времени с номером n=1, 2, 3…, осуществляют контроль превышения текущей скорости транспортного средства над допустимой скоростью транспортного средства на повороте посредством неравенства V≤Vдоп.о.
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ НА ПЕРЕКРЕСТКЕ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2271516C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАЛЬНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТОВ | 1999 |
|
RU2169373C2 |
| Устройство для улавливания спиртовых паров, выделяющихся из спиртохранилищ | 1939 |
|
SU59868A1 |
| US 3765765 А, 16.10.1973 | |||
| US 7286930 B2, 04.08.2005 | |||
| Кожух для лобовых частей статорной обмотки электрических машин переменного тока | 1955 |
|
SU143104A1 |

