Фиг.
Изобретение относится к области строительства, в частности к способам перемещения грузов, для которых допустимо воздействие динамических (ударных) нагрузок.
Цель изобретения - удешевление перемещения.
На фиг. 1 изображена схема перемещения груза, установленного и закрепленного на поворотной платформе; на фиг. 2 - схема в положении, подготовленном к процессу перемещения (в состоянии неустой- Ю этом чивого равновесия); на фиг. 3 - схема в промежуточном положении при свободном падении с поворотом груза вокруг нижнего ребра платформы; на фиг. 4 - схема
при заверщении процесса падения и ,сопри- где л/ц-та„ косновении с опорной поверхностью; на фиг. 5 - зависимость между коэффициентом трения frp и углом а поворота всей конструкции.
Перемещаемый груз 1 предварительно устанавливают на поворотную платформу 2 20 с опиранием его через нижнее ребро 3 платформы 2 на опорную поверхность 4 и крепят к ней любым известным способом, предотвращающим его смещение. Установку осуществляют, например, подъемом g с помощью домкратов и подведением платформы 2 под груз 1 или любым другим способом. После этого тянущим средством 5 методом поворота вокруг нижнего ребра 3 платформу 2 с грузом 1 переводят в половенного веса Р и реакции опоры (ребра 3) в точке А - сила NI:
, где m - масса груза;
g - ускорение свободного падения.
На втором этапе (фиг. 3) груз 1 поворачивается вокруг ребра 3 под действием силы Т, касательной к окружности с центром в точке А и радиусом , при
7 Psma; yV2 5-yVu или
N2 Pcosa.-Nu mgCGsa:-man,(1)
центробежная сила при движении по окружности; Л 2 - реакция стержня АВ от воздействия ребра 3 в точке А;
V/2.
а„ центробежное ускорение, в
котором Кт - мгновенная линейная скорость, направленная по касательной к окружности, совпадающая по направлению с силой Т (условно не показана).
Для определения скорости V-, используют закон сохранения энергии, т. е. то, что изменение потенциальной энергии равно изменению энергии кинетической по абсожениГн устойч1;вого равновесия когда 30--ной Л РГп.™,
что при повороте груза 1 до соприкосновения нижней поверхности поворотной платформы 2 с опорной поверхностью 4 эта платформа остается неподвижной относительно поверхности 4, т. е. она не процентр тяжести груза 1 и ребро 3 расположены в одной вертикальной плоскости. Затем связь между тянущим средством 5 и платформой 2 разъединяется и груз 1
на платформе 2 получает возможность сво- ,
бодного падения с поворотом вокруг реб- 35 с ьзывает по опорной поверхности 4. ра 3 на угол а до соприкосновения с опор-Таким образом
ной поверхностью 4, на которой установлена платформа 2. При этом npvi достаточном угле а поворота груза 1 под действием инерции прямолинейного движения он со
и АКчлии1 - (2) где - начальная потенциальная
ем инерции ирнмилинеини д,.п п энергия,
верщает горизонтальное перемещение (сколь- 0 U mgRcosa. - конечная потенциальная жение) вместе с платформой 2 по поверхнос-энергия;
ти 4. После остановки груза операцию повторяют до его полного перемещения на необходимое расстояние. р,,, , „,,,.
жении неустойчивого равновесия О, то вьфаК - -- начальная энергия.
потенциальная
Пример. Груз 1 представлен телом массой т, сосредоточенной в центре тяжести. Считают, что груз 1 несжимаем, стержни ДЗ Р, ВС - жесткие и не имеют массы, а проекция ребра 3 находится в точке А. Соприкосновение груза 1 через платформу 50 9 с опорной поверхностью 4 происходит тогда когда треугольник ABC повернется на угол ( t ВАС (угол между нижней поверхностью поворотной платформы 2 и опорной поверхностью 4).
При повороте груза на первом этапе (фиг 2) груз 1 находится в положении неустойчивого равеновесия (верхнее положение центра тяжести) под действием собстжение (2) выглядит так:
или
mgR-mgRcosa.(l-cosa),
тогдал
(l-cosa)
(3)
После подстановки
(3cosa-2)(4)
55 Горизонтальная составляющая силы N2(N2sina) пытается сдвинуть платформу 2, а ей препятствует сила трения fTp.i N2Cosa,, следовательно, исключить
венного веса Р и реакции опоры (ребра в точке А - сила NI:
, где m - масса груза;
g - ускорение свободного падения.
этом
где л/ц-та„
На втором этапе (фиг. 3) груз 1 поворачивается вокруг ребра 3 под действием силы Т, касательной к окружности с центром в точке А и радиусом , при
7 Psma; yV2 5-yVu или
N2 Pcosa.-Nu mgCGsa:-man,(1)
центробежная сила при движении по окружности; Л 2 - реакция стержня АВ от воздействия ребра 3 в точке А;
V/2.
а„ центробежное ускорение, в
котором Кт - мгновенная линейная скорость, направленная по касательной к окружности, совпадающая по направлению с силой Т (условно не показана).
Для определения скорости V-, используют закон сохранения энергии, т. е. то, что изменение потенциальной энергии равно изменению энергии кинетической по абсо--ной Л РГп.™,
--ной Л РГп.™,
что при повороте груза 1 до соприкосновения нижней поверхности поворотной платформы 2 с опорной поверхностью 4 эта платформа остается неподвижной относительно поверхности 4, т. е. она не про ,
с ьзывает по опорной поверхности 4. Таким образом
конечная потенциальная энергия;
р,,, , „,,,.
начальная энергия.
потенциальная
жении неустойчивого равно
жение (2) выглядит так:
или
mgR-mgRcosa.(l-cosa),
тогдал
(l-cosa)
(3)
50
После подстановки
(3cosa-2)(4)
55 Горизонтальная составляющая силы N2(N2sina) пытается сдвинуть платформу 2, а ей препятствует сила трения fTp.i N2Cosa,, следовательно, исключить
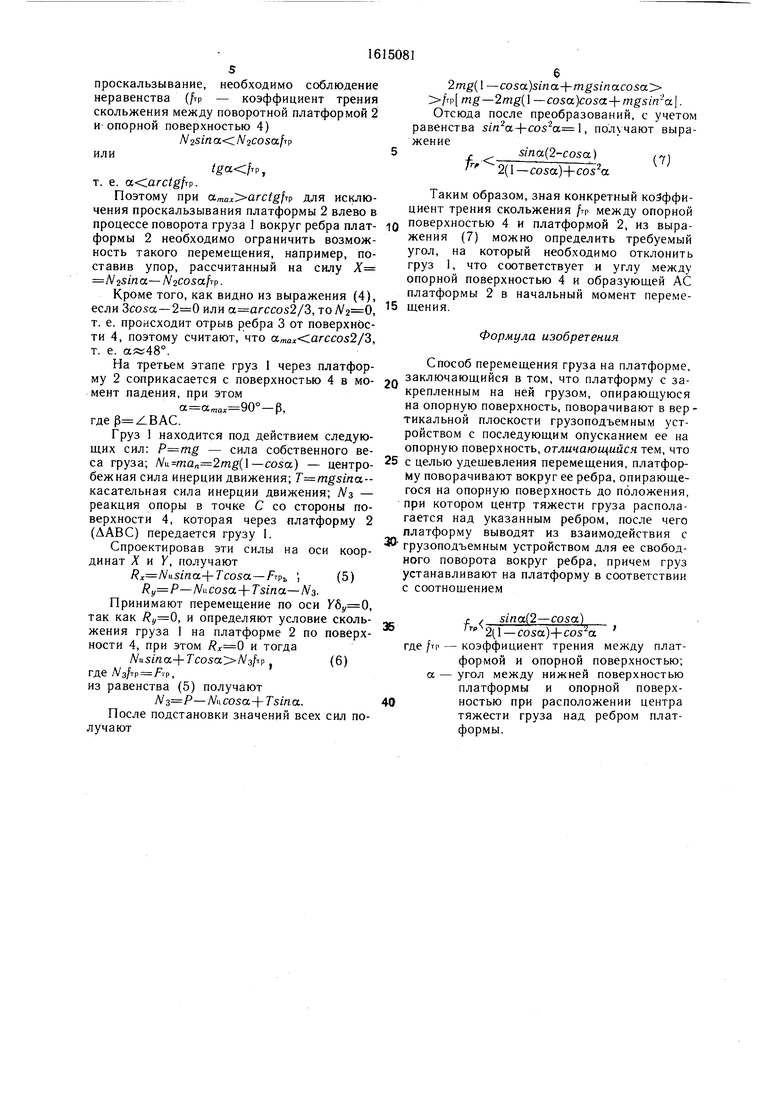
проскальзывание, необходимо соблюдение неравенства (Др - коэффициент трения скольжения между поворотной платформой 2 и опорной поверхностью 4)
N2sinal.N2COsa| f или
, т. е. a,arctg| v.
Поэтому при a.max arctg| p для исключения проскальзывания платформы 2 влево в
2mg(l -cosa.)sina+mgsinacosa h fng-2mg(-cosa)cosct- -mgsin-a.. Отсюда после преобразований, с учетом равенства sin a+cos a l, получают выражение
fsina{2-cosa.)
2(1-со5а)+соРа
(7)
Таким образом, зная конкретный коэффициент трения скольжения /тр между опорной
процессе поворота груза 1 вокруг ребра плат- Ю поверхностью 4 и платформой 2, из выра- формы 2 необходимо ограничить возможность такого перемещения, например, поставив упор, рассчитанный на силу Х Nzsina- Nzcosafrp.
Кроме того, как видно из выражения (4), если 3cosa-2 0 или a arccos2/3, , т. е. происходит отрыв ребра 3 от поверхности 4, поэтому считают, что a.max.arccos2/Z, т. е. a«48°.
На третьем этапе груз 1 через платфоржения (7) можно определить требуемый угол, на который необходимо отклонить груз 1, что соответствует и углу между опорной поверхностью 4 и образующей АС платформы 2 в начальный момент перемещения.
Формула изобретения
Способ перемещения груза на платформе, му 2 соприкасается с поверхностью 4 в мо- 20 заключающийся в том, что платформу с замент падения, при этом
а а„„ 90°-р, .
Груз 1 находится под действием следующих сил: - сила собственного векрепленным на ней грузом, опирающуюся на опорную поверхность, поворачивают в вертикальной плоскости грузоподъемным устройством с последующим опусканием ее на опорную поверхность, отличающийся тем, что
МУ поворачивают вокруг ее ребра, опирающегося на опорную поверхность до положения, при котором центр тяжести груза располагается над указанным ребром, после чего платформу выводят из взаимодействия с грузоподъемным устройством для ее свободного поворота вокруг ребра, причем груз устанавливают на платформу в соответствии с соотнощением
са груза; (l-cosa) - центро- с целью удещевления перемещения, платфор- бежная сила инерции движения; 7 /п 5Ша-- касательная сила инерции движения; N3 - реакция опоры в точке С со стороны поверхности 4, которая через платформу 2 (ДАВС) передается грузу 1.
Спроектировав эти силы на оси координат А и У, получают
Rx N -sincL-{-Tcosa-frpj, ;(5)
/ 1/ Я-A/ucosa-|-7 swa-Л з. Принимают перемещение по оси , так как , и определяют условие скольжения груза 1 на платформе 2 по поверхности 4, при этом и тогда
N sina- t-Tcosa Nзf p(6)
где Л/з/тр / тр, из равенства (5) получают
NZ P-Micosa-f Tsmoc. После подстановки значений всех сил получают
35
Гтр о
sina.(2-cosa
40
2 l-cosa)-fcoPcx
где/тр - коэффициент трения между платформой и опорной поверхностью; а - угол между нижней поверхностью платформы и опорной поверхностью при расположении центра тяжести груза над ребром платформы.
2mg(l -cosa.)sina+mgsinacosa h fng-2mg(-cosa)cosct- -mgsin-a.. Отсюда после преобразований, с учетом равенства sin a+cos a l, получают выражение
fsina{2-cosa.)
2(1-со5а)+соРа
(7)
поверхностью 4 и платформой 2, из выра-
жения (7) можно определить требуемый угол, на который необходимо отклонить груз 1, что соответствует и углу между опорной поверхностью 4 и образующей АС платформы 2 в начальный момент перемещения.
Способ перемещения груза на платформе, заключающийся в том, что платформу с закрепленным на ней грузом, опирающуюся на опорную поверхность, поворачивают в вертикальной плоскости грузоподъемным устройством с последующим опусканием ее на опорную поверхность, отличающийся тем, что
с целью удещевления перемещения, платфор-
МУ поворачивают вокруг ее ребра, опирающегося на опорную поверхность до положения, при котором центр тяжести груза располагается над указанным ребром, после чего платформу выводят из взаимодействия с грузоподъемным устройством для ее свободного поворота вокруг ребра, причем груз устанавливают на платформу в соответствии с соотнощением
с целью удещевления перемещения, платфор-
Гтр о
sina.(2-cosa
2 l-cosa)-fcoPcx
где/тр - коэффициент трения между платформой и опорной поверхностью; а - угол между нижней поверхностью платформы и опорной поверхностью при расположении центра тяжести груза над ребром платформы.
Фиг.г
ц
Щиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разделения потока конических деталей и устройство для его осуществления | 1986 |
|
SU1405898A1 |
| Устройство для центрирования ленты конвейера | 1990 |
|
SU1801876A1 |
| Устройство для загрузки емкостейСыпучиМ МАТЕРиАлОМ | 1979 |
|
SU844521A1 |
| Линия нанесения защитных покрытий | 1983 |
|
SU1143676A1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ГРУЗОПОДЪЕМНОГО СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2281242C1 |
| ОПТИКО-МЕХАНИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU422976A1 |
| Кабина управления козлового крана | 1977 |
|
SU701919A1 |
| РУЧНАЯ ТЕЛЕЖКА | 1991 |
|
RU2011589C1 |
| Ручная хозяйственная тележка | 1988 |
|
SU1650509A1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ САМОЛЕТА НА ПРОБЕГЕ И ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПРИ ВЗЛЕТЕ И ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2484279C1 |

Изобретение относится к строительству, в частности к способам перемещения грузов, для которых допустимо воздействие динамических (ударных) нагрузок. Цель изобретения - удешевление перемещения. Способ перемещения грузов осуществляется без применения грузоподъемных средств с использованием поворотной платформы 2, на которой размещен груз 1, посредством приложения усилия к этой платформе для поворота груза в вертикальной плоскости с последующим опусканием (падением) его на опорную поверхность 4. Новым в предложенном способе является то, что это опускание осуществляется как свободное падение с поворотом вокруг ребра поворотной платформы. После падения груз скользит на платформе по опорной поверхности благодаря инерции прямолинейного движения, а угол, на который для перемещения отклоняется груз, выбирается в зависимости от коэффициента трения скольжения между платформой и опорной поверхностью. 5 ил.
30 40 50 60 70 80 90 оС
Составитель А. Мазилкин
Техред А. КравчукКорректор М. Шароши
Заказ ааььТираж 649Подписное„
ВНИИПИ Госуда..веи„о.о комитет., изоар™ ГТТ/Г Производствен ате ьсГий омбинат .Па тент., г. Ужгород, ул. Гагарика, 101
Редактор Н. Бобкова Заказ 3956
треб
Фиг. 5
| Устройство для кантования изделий | 1977 |
|
SU821384A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
