(риеЗ
Изобретение относится к измерительной технике в судовождении и может быть использовано для определения динамических наклоненир морского судна на качке.
Цель изобретения - повьпиение точности за счет уменьшения влияния ошибок, обусловленных изменением положения центра масс и действием угловой скорости и углового ускорения.
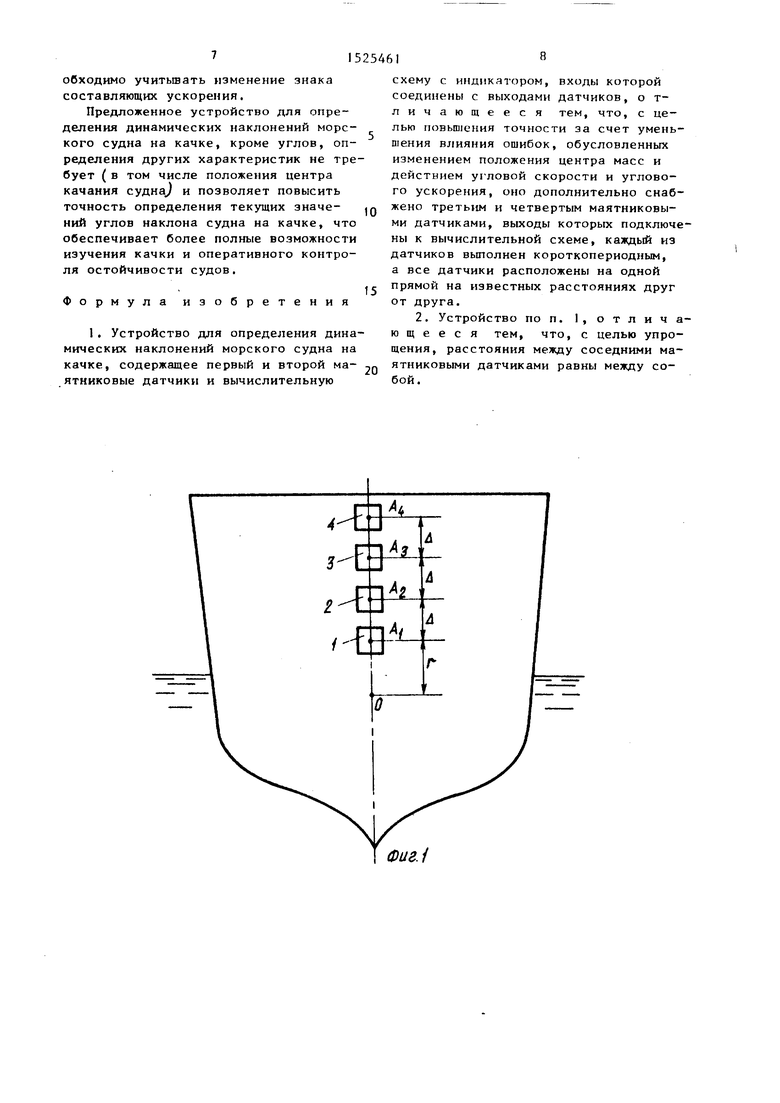
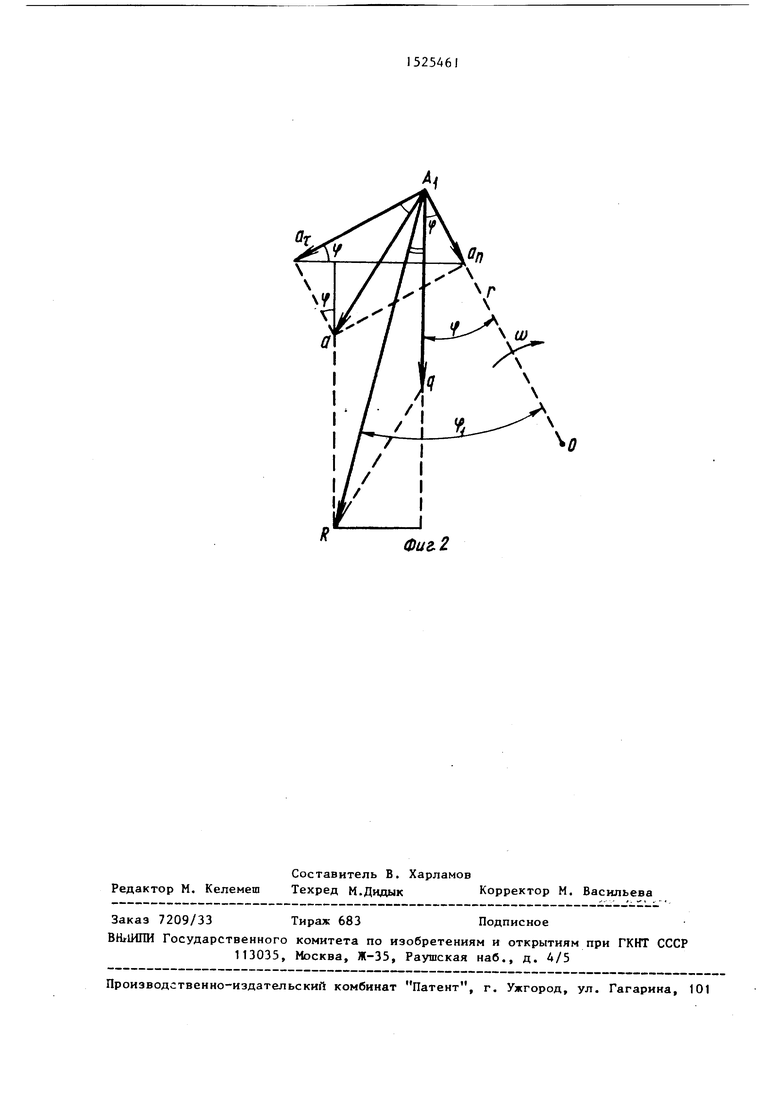
На фиг. 1 дана схема размещения маятников на судне; на фиг. 2 - схема сил, действующих на маятник на качке; на фиг. 3 - схема предлохсенного устройства.
Устройство содержит датчики 1-4, вычислительную схему 5 и индикатор 6, вход которого соединен с выходом схемы 5. Выходы датчиков 1-4 соединены с входом схемы 5.
Устройство работает следующим образом.
На судне в плоскости мидель-щпан- гоута на вертикали, по которой указан ная плоскость пересекается с диаметральной плоскостью, в точках А, А,, А, А. на .четырех уровнях, например выше центра тяжести судна (т. 0), принимаемого за центр качания, устанавливают датчики 1, 2, 3, 4 (кренометры маятникового или жидкостного типа) . При этом расстояние между датчиками равно Л (между I и 2, 2 и 3, 3 и 4 соответдтвенно).
При наклонах судна на качке одновременно производят отсчеты по кренометрам 1-4 и по полученным измеренным данным вычисляют действительные текущие значения углов наклона судна.
Это возможно по следующим соображениям.
При качке судна механический маятник, если он подвешен в точке, не сов падающей с центром качания корпуса судна, дает угол наклона судна, не равный действительному.
На фиг. 2 прямая ОА изображает след диаметральной плоскости судна, наклонившегося при бортовой качке на угол ср к вертикали. Точка О - центр качания судна, т. А, - точка подвеса маятника кренометра 1, отстоящая от центра качания на расстояние г, а - ускорение, обусловленное действием радиального и тангенциального ускорений, R - равнодействующая ускорений.
Производя отсчет по датчику 1, получают угол (, , не равный tf. При
это.ч связь между текушими значениями этих углов можно 11редс авить как atcos - Ч
--g(4, )
g .t l/ + а pCosM
(I)
10
15
20
25
30
35
40
где (f, , С/) - измеренный с помощью кре- нометоа 1 и действительный угол наклона судна;
dCO а. г -- - тангенциальное ускорение;
2 а ru) - радиальное ускорение;
g ускорение силы тяжести;
U - У|ловая скорость наклона судна;
г - отстояние точки А, подвеса маятника до центра О качания судна.
При динамическом крене судна на каждую единицу массы в точке А « действует ускорение силы тяжести g и ускорение а, обусловленное действием тангенциального aj и радиального а ускорений при колебательном движении точки А( на качке. Поэтому положение маятника в каждый данньЕЙ момент соответствует не направлению действия ускорения силы тяжести g (не по отвесной линии), а равнодействующей R (мгновенной вертикали), т.е. маятник отклоняется от отвесной линии на некоторый угол. Величина этого отклонения зависит от значения ускорений на качке, угла наклона и расстояния от точки подвеса маятника до центра качания судна. Значение разностного угла увеличивается по мере удаления точки подвеса маятника от центра качания судна, т.е. значения измеренных углов q, , Cft « М, 1|ф наклона судна, полученные одновременно от датчиков I, 2, 3, 4, расположенных на вертикальной оси судна на различных расстояниях от его центра качания, отличаются по величине.
45
На этом основании (с подстановкой вместо а и а их вьфажений) для текущих значений углов наклона, измерен- ньпс с помощью датчиков 1-4, можно записать;
5
tg(4 i-4 )
tg(4 i -Ч)
(2)
do)1 .
г -- cosc; - гизшч)
d(0 .I
g + Г-- sincf+rucobtf
(r+u) - cos(f-(r-fu)o sin(f at
.dCO
;(3)
g+(r-fb)-- sin((.)(jfco3(t
dt
.d(J
()-- cosif-(r + 2u)u sinif tg(cf, -(f)- ------;
g+(r+2A)7- sin(f4(r + 2A)(JcosCP
(r+3u)-- cost/ -(r-t-3A)Wsin(/ dt
gW4-l/)
g+(r+3b)-- sinCf+Cr+SAX/cosif
(5)
где cp, , Cf , Ц, , Cp - измеренные с по-
мощью датчиков 1 4 текущие значения динамических углов крена судна на качке; Cf - текущее значение действительного динамического угла крена судна; СО - текущее значение действительной угловой скорости наклонения судна при крене, В уравнениях (2)-(5) неизвестными
являются cf, СО, и г. Для исключения
.0 dCO
осреднения т величина -- также принята неизвестной. Поэтому в предложенном устройстве для определения знача- НИИ 1 должно быть использовано не менее чьгырех датчиков, размещенных на судне указанным образом.
Решая совместно уравнения (2)-(5), получим
,. 4 arctgC2а
(6)
где а Atgq, tgg,- 3tg(pitgCf,-3tg4. Atgcfitgif - tgg ,tgCf4-4o
-tgqi, tg4i;
b - 3tgifitgVi- 3tg4 itgg ,tg(f4+
+ - , 3tgq , tgc,tg(| -4tgVtgCf + 3tgVtgU ,+ tgq, tgV-3tgif, tgifitgCf, 3tgcf,tg(/itgci4; 45 с 4tgtf,tgtfitg 4 3- tg(/ tg i/.tgo,-3tgCf. tg4 itgt; tgcf4+ tg cfjtgt tgtp - -Stg ljtg i;,- tgq itgq .tgcp.
Таким образом, в предложенном уст- ,« ройстве действительные текущие значения углов tf наклона судна на качке получают путем вычислений по формуле (6) по данным измеренных с помощью датчиков 1-4 углов („ Ч .ч.Ч ,, на уровнях А(, Ае, А, А по вертикали судна.
Устройство позволяет определить динамические наклонения судна при кре1525A61
не или дифференте на качке в зависимости от того, в какой плоскости установлены кренометры.
Данные об измеренных текущих значениях углов наклона ср, , gi , ц, , ср от датчиков 1-4 поступают в вычислительную схему 5, где по формуле (6) определяется действительное текущеее значение угла С наклона судна, которое затем поступает на индикатор 6 (фиг. 3).
Точность определения углаCf, в основном, зависит от точности выбранных датчиков 1-4. Если расстояния меж ду смежными уровнями не равны и выбраны произвольно, расчетная формула принципиально не изменяется. При этом изменяются только значения а, Ь и с, так как в них присутствуют расстояния между уровнями, т.е.:
- - -г| Г:ГЙ1 м.-(М,
i.b.,.
.- .)
ь -6,(6,u.)(6,tg%-u,t8(f, s,(i.H.)tgi,.(i,-A,||:f|| - - гЙ: Й - - -(M..t.6,MfgbEf| - (A,es4.-«.ts4,,A.-a.. с . (Me4-N.i :Eff|).
,u,tgCf4- (й.Лг+Д1 +&.&,)«
(&,,)tgCf.(u,tgqi,- Д tgl trtgVi-. ,
где Д , расстояние между A, и ug - расстояние между A и uj - расстояние между A, и A4.. Отметим, что датчики можно устанавливать как ниже, так и выпе центра масс судна. Тогда при вычислениях необходимо учитьшать изменение знака составляющих ускорения.
Предложенное устройство для определения динамических наклонений морского судна на качке, кроме углов, определения других характеристик не требует ( в том числе положения центра качания судна и позволяет повысить точность определения текущих значений углов наклона судна на качке, что обеспечивает более полные возможности изучения качки и оперативного контроля остойчивости судов.
Формула изобретения
1. Устройство для определения динамических наклонений морского судна на качке, содержащее первый и второй ма- ятниковые датчики и вычислительную
схему с индикатором, входы которой соединены с выходами датчиков, о т- личающееся тем, что, с целью повьш1ения точности за счет уменьшения влияния ошибок, обусловленных изменением положения центра масс и действием угловой скорости и углового ускорения, оно дополнительно снабжено третьим и четвертым маятниковыми датчиками, выходы которых подключены к вычислительной схеме, каждый из датчиков вьшолнен короткопериодным, а все датчики расположены на одной прямой на известных расстояниях друг от друга.
2. Устройство по п. 1,отлича- ю щ е е с я тем, что, с целью упрощения, расстояния между соседними маятниковыми датчиками равны между собой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углов наклона | 1986 |
|
SU1420369A1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| СТАТОДИНАМИЧЕСКИЙ КРЕНОМЕТР | 1992 |
|
RU2057679C1 |
| Маятниковый кренометр | 1976 |
|
SU591690A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОСАДКИ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1997 |
|
RU2116929C1 |
| Маятниковый кренодифферентометр | 1977 |
|
SU678286A1 |
| Измеритель собственной частоты и коэффициента демпфирования бортовой качки судна | 1971 |
|
SU441193A1 |
| Обращенная маятниковая система с гипертрофированным периодом колебания для определения угла отклонения от горизонтальной плоскости | 2020 |
|
RU2748648C1 |
| Способ коррекции магнитного курса судна | 2024 |
|
RU2839828C1 |
| КРЕНОМЕТР | 1973 |
|
SU395712A1 |
Изобретение относится к измерительной технике в судовождении и может быть использовано для определения динамических наклонений морского судна на качке. Целью изобретения является повышение точности за счет уменьшения влияния ошибок, обусловленных изменением положения центра масс и действием угловой скорости и углового ускорения. С четырех датчиков 1-4 устройства, выполненных в виде короткопериодных маятников, поступает информация на вычислительную схему 5 с индикатором 6. Датчики 1-4 расположены на одной прямой на известных расстояниях друг от друга. Положение прямой линии относительно центра масс может быть произвольным. Для упрощения, расстояния между соседними маятниковыми датчиками выбраны равными между собой. 1 з.п. ф-лы, 3 ил.
./
иг
Фиг. 2
| Шулейкин В.В | |||
| Физика моря | |||
| М., АН СССР, 1953, с | |||
| Непрерывно действующая хлебная печь | 1925 |
|
SU968A1 |
| Палент Великобритании № 1321025, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
