1
Изобретение относится к геодезической измерительной технике и предназначено для определения геодезических прямоугольных координат объектов (судна, точек наблюдений и др.) при выполнении морских геологогеофизических, геодезических и других работ.
В настоящее время при проведении геологогеофизических исследований на море положение пунктов наблюдений определяется главным образом методами, основанными на применении фазовых радиогеодезических систем, использующих гиперболическую систему координат.
Обеспечивая высокую точность измерений, эти методы в то же время требуют большого объема вычислений вследствие необходимости двойного преобразования координат: из прямоугольной системы в гиперболическую и обратно. Геодезическая техника, используемая в настоящее время «а море, не располагает специализированными устройствами для решения подобных задач. Поэтому все -сопутствующие им вычисления производятся вручную С применением простейшей вычислительной техники. При этом основной объем вычислений приходится на решение обратной задачи: вычисление прямоугольных координат по гиперболическим.
При решении прямой задачи производится перевод прямоугольных координат точек заданной линии (x) в гиперболические. Эта операц,ия сводится к вычислению парных разностей расстояний от текущей точки М(х,у) линии (х) до трех фиксированных точек
А(Х,, У,), В(Х, Г,) и С(Х,, П); Дг, У(х-Х,} + (у-У,)(x-X,} + (,Y.(1)
Аг. Y(x-X,Y + (y-Y,Y-У(х-Х,)- + (у-У,).(2)
Вычисленные значения Ari и Лга, пропорциональные гиперболическим координатам, являются контрольными величинами при вождении судна по заданной линии.
Прямая задача, определяемая уравнениями (I) и (2), проста и для ее решения может
быть построено несложное специализированное вычислительное устройство. Обратная задача, напротив, является громоздкой и требует для своего решения создания сложной вычислительной машины.
Цель изобретения - упрощение процесса определения.
Для этого в предлагаемое устройство введены блоки сравнения текущих значений абсцисс и ординат каждого семейства гиперболических кривых, счетно-корректирующее устройство и функциональные преобразователи, выходы которых соединены с системами преобразования координат и блоком сравнения ординат, а входы связаны с выходами счетнокорректирующего устройства и выходами блоков ввода неременной х, другой выход которых связан с входом блока сравнения абсцисс, выход которого подключен к счетно-корректируюш,ему устройству.
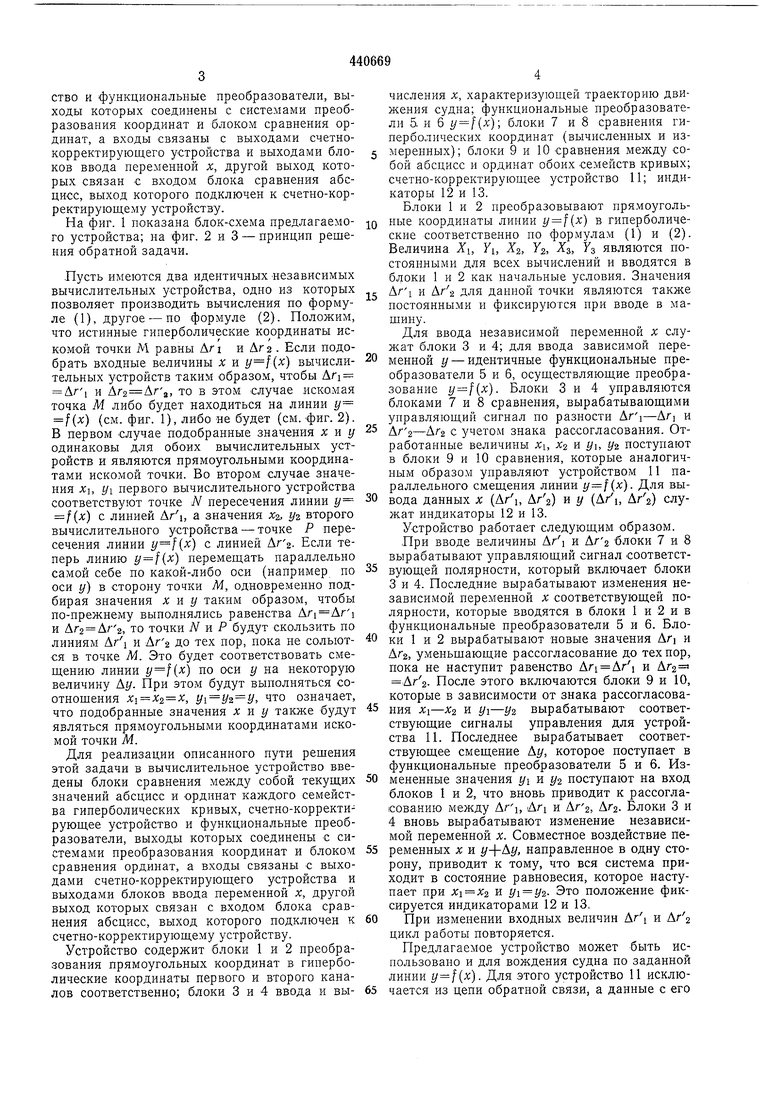
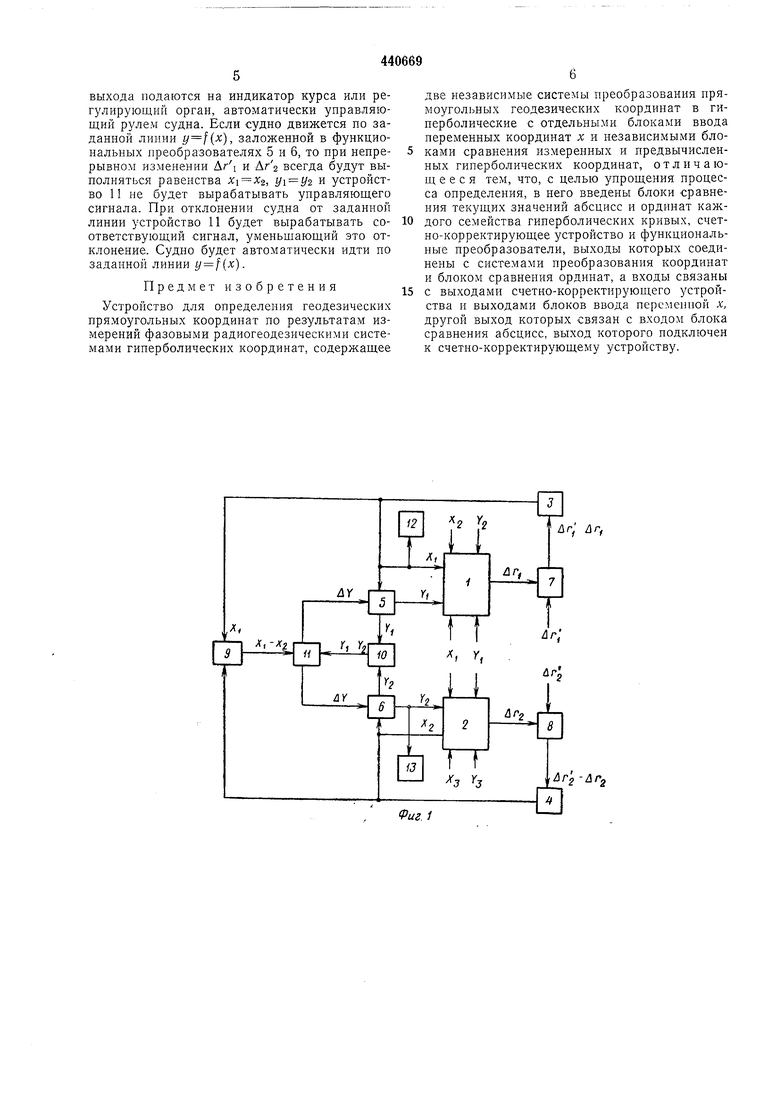
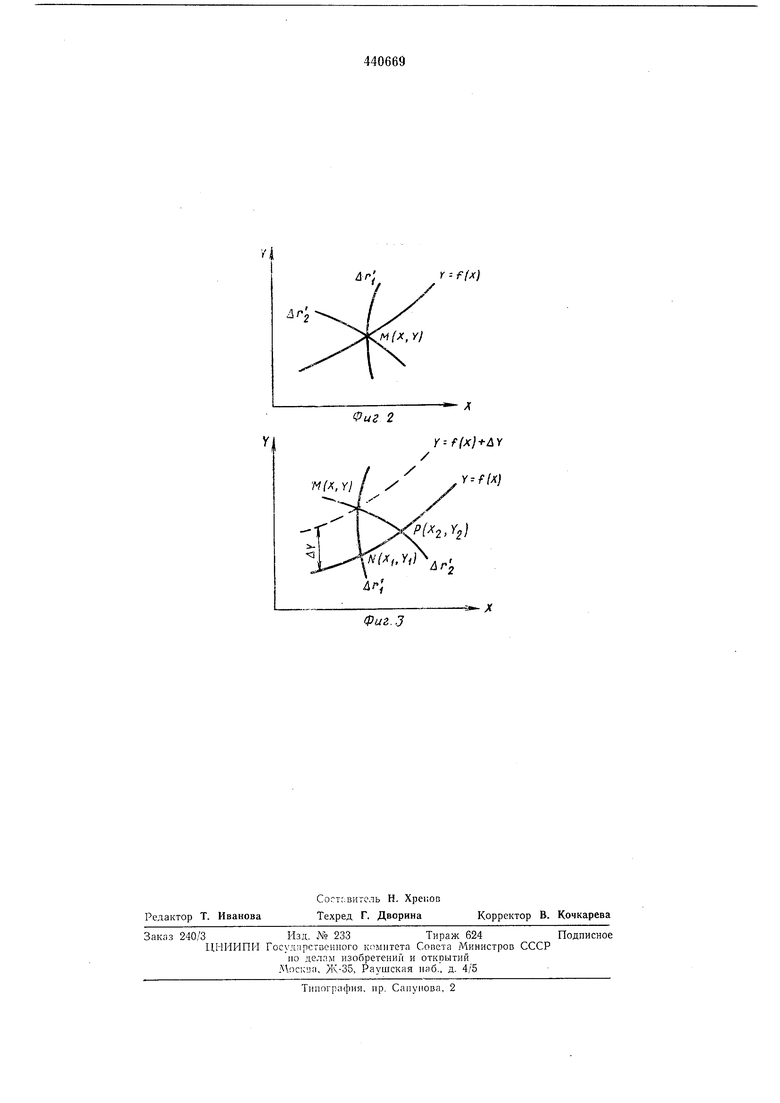
На фиг. 1 ноказана блок-схема предлагаемого устройства; на фиг. 2 и 3 - принцип решения обратной задачи.
Пусть имеются два идентичных -независимых вычислительных устройства, одно из которых позволяет производить вычисления по формуле (1), другое - по формуле (2). Положим, что истинные гиперболические координаты искомой точки М равны Arj и Дгз . Если подобрать входные величины х и ) вычислительных устройств таким образом, чтобы Ari и , то в этом случае иско-мая точка М либо будет находиться на линии у f(x) (см. фиг. 1), либо не будет (см. фиг. 2). В первом случае подобранные значения л; и у одинаковы для обоих вычислительных устройств и являются прямоугольными координатами искомой точки. Во втором случае значения Xi, г/1 первого вычислительного устройства соответствуют точке N пересечения линии (x) с линией Агь а значения Xz, yz второго вычислительного устройства - точке Р пересечения линии (x) с линией Ага. Если теперь линию (x) перемещать параллельно самой себе по какой-либо оси (например по оси у) в сторону точки М, одновременно подбирая значения хну таким образом, чтобы по-прежнему выполнялись равенства и Аг2 Аг2, то точки N к Р будут скользить по линиям Ari и Ага до тех пор, пока не сольются в точке М. Это будет соответствовать смещению линии (x) по оси у на некоторую величину At/. При этом будут выполняться соотнощения , (/i , что означает, что подобранные значения х yi у также будут являться прямоугольными координатами искомой точки М.
Для реализации описанного пути решения этой задачи в вычислительное устройство введены блоки сравнения между собой текущих значений абсцисс и ординат каждого семейства гиперболических кривых, счетно-корректирующее устройство и функциональные преобразователи, выходы которых соединены с системами преобразования координат и блоком сравнения ординат, а входы связаны с выходами счетно-корректирующего устройства и выходами блоков ввода переменной х, другой выход которых связан с входом блока сравнения абсцисс, выход которого подключен к счетно-корректирующему устройству.
Устройство содержит блоки 1 и 2 преобразования прямоугольных координат в гиперболические координаты первого и второго каналов соответственно; блоки 3 и 4 ввода и вычисления X, характеризующей траекторию движения судна; функциональные преобразователи 5- и 6 (x), блоки 7 и 8 сравнения гиперболических координат (вычисленных и измеренных); блоки 9 и 10 сравнения между собой абсцисс и ординат обоих семейств кривых; счетно-корректирующее устройство 11; индикаторы 12 и 13.
Блоки 1 и 2 преобразовывают прямоугольные координаты линии y f(x) в гиперболические соответственно но формулам (1) и (2). Величина Xi, YI, Х, YZ, Х, УЗ являются постоянными для всех вычислений и вводятся в блоки 1 и 2 как начальные условия. Значения и Ага для данной точки являются также постоянными и фиксируются при вводе в машину.
Для ввода независимой переменной х служат блоки 3 и 4; для ввода зависимой переменной у - идентичные функциональные преобразователи 5 и 6, осуществляющие преобразование (x). Блоки 3 и 4 управляются блоками 7 и 8 сравнения, вырабатывающими управляющий сигнал по разности Ari-АГ и Аг2-Аг2 с учетом знака рассогласования. Отработанные величины Xi, Х2 и г/ь г/2 поступают в блоки 9 и 10 сравнения, которые аналогичным образом унравляют устройством И параллельного смещения линии y-f(x). Для вывода данных X (Агь Ага) и у (Ari, Ars) служат индикаторы 12 и 13.
Устройство работает следующим образом.
При вводе величины Ari и Агз блоки 7 и 8 вырабатывают унравляющий сигнал соответствующей полярности, который включает блоки
3и 4. Последние вырабатывают изменения независимой переменной х соответствующей полярности, которые вводятся в блоки 1 и 2 и в функциональные преобразователи 5 и 6. Блоки 1 и 2 вырабатывают новые значения АГ и Аг2, уменьшающие рассогласование до тех пор, пока не наступит равенство и Аг2. После этого включаются блоки 9 и 10, которые в зависимости от знака рассогласования Xi-Х2 и г/1-г/2 вырабатывают соответствующие сигналы управления для устройства 11. Последнее вырабатывает соответствующее смещение Аг/, которое поступает в функциональные преобразователи 5 и 6. Измененные значения г/i и г/2 поступают на вход блоков 1 и 2, что вновь приводит к рассогласованию между Ari, Ari и Аг2, Аг2. Блоки 3 и
4вновь вырабатывают изменение независимой переменной х. Совместное воздействие переменных X и i/+Ai/, направленное в одну сторону, приводит к тому, что вся система приходит в состояние равновесия, которое наступает при Xi X2 и г/1 г/2- Это положение фиксируется индикаторами 12 и 13.
При изменении входных величин Ari и Аг2 цикл работы повторяется.
Предлагаемое устройство может быть использовано и для вождения судна по заданной линии y f(x). Для этого устройство 11 исключается из цепи обратной связи, а данные с его
выхода подаются на индикатор курса или регулирующий орган, автоматически уиравляющий рулем судна. Если судно движется по заданной линии (x), заложенной в функциональных преобразователях 5 и 6, то при непреРЫБНОМ изменении Ari и Дг2 всегда будут выполняться равенства , r/i z/2 н устройство 11 не будет вырабатывать управляющего сигнала. При отклонении судна от заданной линии устройство 11 будет вырабатывать соответствующий сигнал, уменьшающий это отклонение. Судно будет автоматически идти по заданной линии y f(x).
Пред мет изобретения
Устройство для определения геодезических прямоугольных координат по результатам измерений фазовыми радиогеодезическими системами гиперболических координат, содержащее
две независимые системы преобразования прямоугольных геодезических координат в гиперболические с отдельными блоками ввода переменных координат х и независимыми блоками сравнения измеренных и предвычисленных гиперболических координат, отличающееся тем, что, с целью упрощения процесса определения, в него введены блоки сравнения текущих значений абсцисс и ординат каждого семейства гиперболических кривых, счетно-корректирующее устройство и функциональные преобразователи, выходы которых соединены с системами преобразования координат и блоком сравнения ординат, а входы связан ь1 с выходами счетно-корректирующего устр ойства и выходами блоков ввода персмеппой х, другой выход которых связан с входом блока сравнения абсцисс, выход которого подключен к счетно-корректирующему устройству.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1989 |
|
SU1695294A1 |
| Способ разрешения многозначности результатов измерений при определении местоположения подвижного объекта фазовыми или частотными радиотехническими системами (ртс) | 1980 |
|
SU885946A1 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU332438A1 |
| Линейно-круговой интерполятор | 1976 |
|
SU647653A1 |
| Устройство для преобразования координат | 1985 |
|
SU1295386A1 |
| Способ геодезической привязкиМАРшРуТОВ РАдиОгЕОдЕзичЕСКиХ СиСТЕМ | 1979 |
|
SU800634A1 |
| Устройство для вычисления полярных координат | 1987 |
|
SU1449985A2 |
| Устройство для поворота системы координат | 1987 |
|
SU1444876A1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
Л г/ Л г,
Y -- fix
M(x, I /
i-q
- Л
Фиг 2
r--f(x)+UY
)
()
/vY.,.
