О О
сл ю
CD J-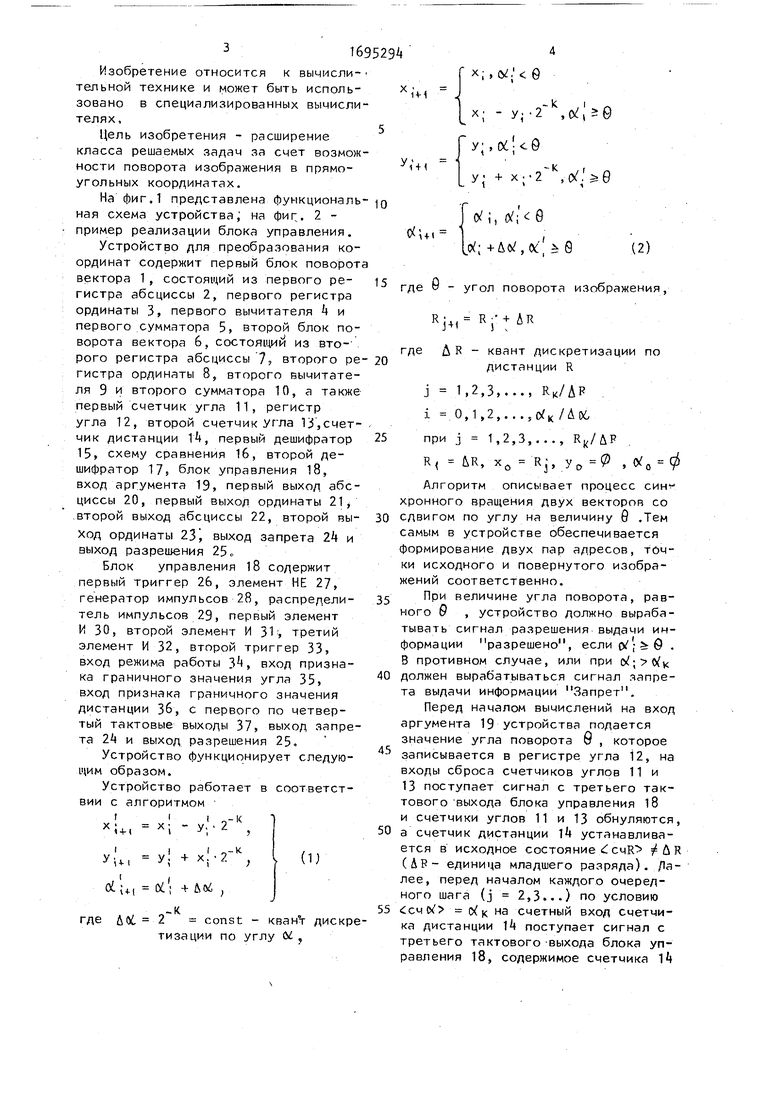

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1985 |
|
SU1295386A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ | 1991 |
|
RU2007749C1 |
| Устройство для преобразования координат | 1985 |
|
SU1254475A1 |
| Устройство для преобразования координат | 1987 |
|
SU1460720A2 |
| Вычислительное устройство | 1986 |
|
SU1322270A1 |
| Устройство для вычисления модуля и аргумента вектора | 1985 |
|
SU1249510A1 |
| Цифровой преобразователь координат | 1988 |
|
SU1536375A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ СКОЛЬЗЯЩЕГО СПЕКТРА | 1998 |
|
RU2125291C1 |
| Устройство для обработки приращений вектора | 1984 |
|
SU1203510A1 |
| Устройство для вычисления тригонометрических функций | 1986 |
|
SU1332313A1 |

Изобретение относится к вычислительной технике и может быть использовано в специализированных вычислителях. Целью изобретения является 2 расширение класса решаемых задач за счет возможности поворота изображения в прямоугольных координатах. Устройство содержит первый блок 1 поворота вектора, содержащий первый регистр абсциссы 2, первый регистр ординаты 3, первый вычиталеь 4, первый сумматор 5, второй блок 6 поворота вектора, содержащий второй регистр абсциссы 7, второй регистр ординаты 8, второй вычитатель 9, второй сумматор 10, первый счетчик угла 11, регистр угла 12, второй счетчик угла 13, счетчик дистанции 1, первый дешифратор 15, схему сравнения 16, второй дешифратор 17, блок управления 18, вход аргумента 19. 2 ил. (Л
% Ъ
316
Изобретение относится к вычисли- тельной технике и может быть исполь- зовано в специализированных вычислителях,
Цель изобретения - расширение класса решаемых задач за счет возможности поворота изображения в прямоугольных координатах.
На фиг,1 представлена фуикциональ ная схема устройства; на фиг. 2 - пример реализации блока управления.
Устройство для преобразования координат содержит первый блок поворот вектора 1, состоящий из первого регистра абсциссы 2, первого регистра ординаты 3, первого вычитателя 4 и первого сумматора 5, второй блок поворота вектора 6, состоящий из второго регистра абсциссы 7, второго ре гистра ординаты 8, второго вычитателя 9 и второго сумматора 10, а также первый счетчик угла 11, регистр угла 12, второй счетчик угла 13,счетчик дистанции 14, первый дешифратор 15, схему сравнения 16, второй дешифратор 1 блок управления 18, вход аргумента 19, первый выход абсциссы 20, первый выход ординаты 21, второй выход абсциссы 22, второй выход ординаты 23, выход запрета 2k и выход разрешения 25
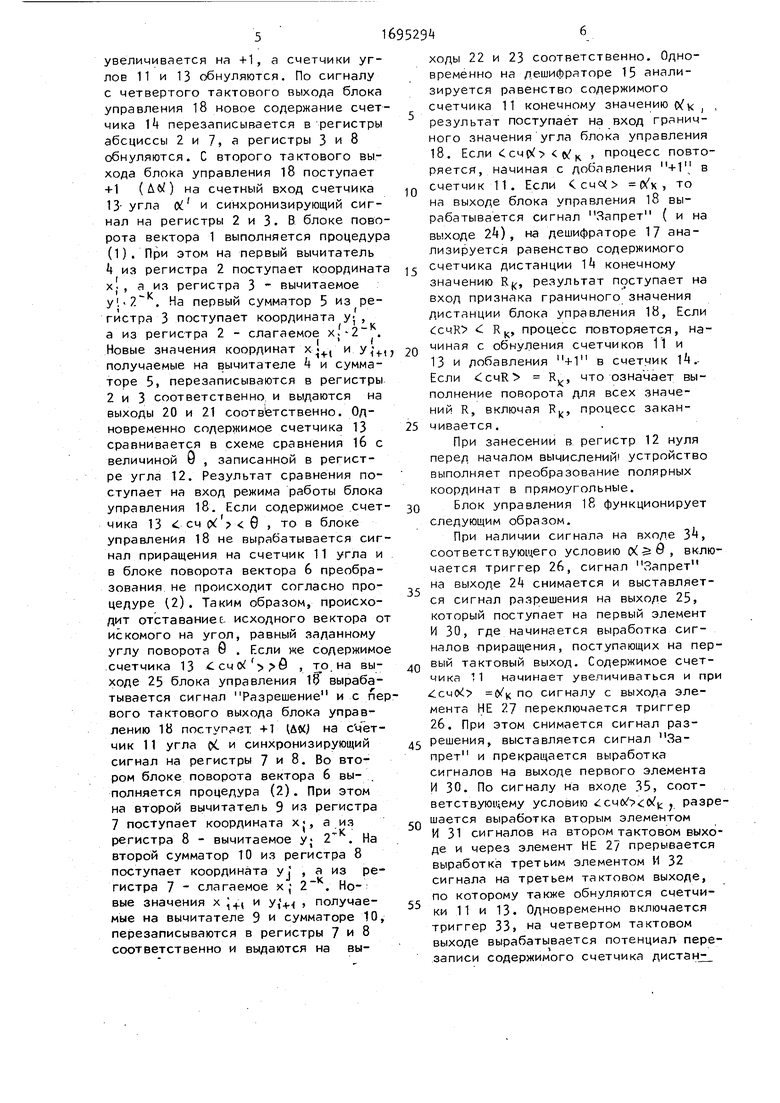
Блок управления 18 содержит первый триггер 26, элемент НЕ 27, генератор импульсов 28, распределитель импульсов 29, первый элемент И 30, второй элемент И 31 третий элемент И 32, второй триггер 33, вход режима работы 34, вход признака граничного значения угла 35, вход признака граничного значения дистанции 36, с первого по четвертый тактовые выходы 37, выход запрета 24 и выход разрешения 25.
Устройство функционирует следующим образом.
Устройство работает в соответствии с алгоритмом
Гк,
+ ( 1
U i i
X ;
- У У:
xi
2
-К
Otu, Od; -t- A oi
t-H
(1)
где
.-К
2 const - квант дискретизации по углу (V
х;,&Г.
1-Н
х; уг2ЛоЛ ге
I
у;,(;сб
у;
+ X
,0Л
Q
х
А + 1
tfi, rf;+uo/,(2)
Где б - угол поворота изображения,
Rj4, Ri t AR
где Д R - квант дискретизации по
J
i
квант дискретизации дистанции R
1,2,3,...) RK/AF
0,1 ,2,.. . ,tfK /Доб
0
5
0
5
0
45
50
55
при j 1,2,3,..., К«/ДР
0
R UR,
Ri, У,
0 9
О 4J J О r 0
Алгоритм описывает процесс син хронного вращения двух векторов со сдвигом по углу на величину 0 .Тем самым в устройстве обеспечивается формирование двух пар адресов, точки исходного и повернутого изображений соответственно.
При величине угла поворота, равного 9 , устройство должно вырабатывать сигнал разрешения выдачи информации разрешено, если (У; 0 . В противном случае, или при должен вырабатываться сигнал запрета выдачи информации Запрет.
Перед началом вычислений на вход аргумента 19 устройства подается значение угла поворота Q , которое записывается в регистре угла 12, на входы сброса счетчиков углов 11 и 13 поступает сигнал с третьего тактового выхода блока управления 18 и счетчики углов 11 и 13 обнуляются, а счетчик дистанции 14 устанавливается в исходное состояние UR (АР- единица младшего разряда). Ла- лее, перед началом каждого очередного шага (j 2,3...) по условию :сче с ц на счетный вход счетчика дистанции 14 поступает сигнал с третьего тактового -выхода блока управления 18, содержимое счетчика 14
i-и и у i-iполучаемые на вычитателе Ц и сумматоре 5, перезаписываются в регистры 2 и 3 соответственно и выдаются на выходы 20 и 21 соответственно. Одновременно содержимое счетчика 13 сравнивается в схеме сравнения 16 с величиной 9 , записанной в регистре угла 12. Результат сравнения поступает на вход режима работы блока управления 18. Если содержимое счетчика (,тов блоке управления 18 не вырабатывается сигнал приращения на счетчик 11 угла и в блоке поворота вектора 6 преобразования не происходит согласно процедуре (2). Таким образом, происходит отставание с исходного вектора от искомого на угол, равный заданному углу поворота б . Если же содержимое счетчика 13 сч( , то. на выходе 25 блока управления 18 вырабатывается сигнал Разрешение и с первого тактового выхода блока управлению 18 поступает +1 ((№) на с ч ет- чик 11 угла ОС и синхронизирующий сигнал на регистры 7 и 8. Во втором блоке поворота вектора 6 выполняется процедура (2). При этом на второй вычитатель 9 из регистра 7 поступает координата Xj, а из регистра 8 - вычитаемое yj 1 . На второй сумматор 10 из регистра 8 поступает координата yj , а из регистра 7 - слагаемое х ; . Новые значения х +( и y, + , получаемые на вычитателе 9 и сумматоре 10, перезаписываются в регистры 7 и 8 соответственно и выдаются на вы
увеличивается на +1 , а счетчики углов 11 и 13 обнуляются. По сигналу с четвертого тактового выхода блока управления 18 новое содержание счетчика 1 перезаписывается в регистры абсциссы 2 и 7, а регистры 3 и 8 обнуляются. С второго тактового выхода блока управления 18 поступает +1 ( Д&0 на счетный вход счетчика 13- угла # и синхронизирующий сигнал на регистры 2 и 3. В блоке поворота вектора 1 выполняется процедур (1). При этом на первый вычитатель k из регистра 2 поступает координат X; , а из регистра 3 - вычитаемое у1. 7. . На первый сумматор 5 из регистра 3 поступает координата у( , а из регистра 2 - слагаемое х.-2 Новые значения координат х«., и у;.
0
0
5
ходы 22 и 23 соответственно. Одновременно на дешифраторе 15 анализируется равенство содержимого счетчика 11 конечному значению (х ц ( результат поступает на вход граничного значения угла блока управления 18. Если счр{ K , процесс повторяется, начиная с добавления +1 в счетчик 11. Если . счс (Х к , то на выходе блока управления 18 вырабатывается сигнал Запрет ( и на выходе 2k), на дешифраторе 17 анализируется равенство содержимого счетчика дистанции 1 конечному значению R, результат поступает на вход признака граничного значения дистанции блока управления 18, Если ЈсчЮ RK, процесс повторяется, начиная с обнуления счетчиков 11 и 13 и добавления +1 в счетчик 1. Если счК R, что означает выполнение поворота для всех значений R, включая R, процесс заканчивается.
При занесении в регистр 12 нуля перед началом вычислений устройство выполняет преобразование полярных координат в прямоугольные.
Блок управления 18 функционирует следующим образом.
При наличии сигнала на входе 3, соответствующего условию (X5 Q , включается триггер 26, сигнал Запрет на выходе 2 снимается и выставляется сигнал разрешения на выходе 25, который поступает на первый элемент И 30, где начинается выработка сигналов -приращения, поступающих на первый тактовый выход. Содержимое счетчика 11 начинает увеличиваться и при 1счо 0i ( по сигналу с выхода элемента НЕ 27 переключается триггер 26. При этом снимается сигнал раз- 5 решения, выставляется сигнал Запрет и прекращается выработка сигналов на выходе первого элемента И 30. По сигналу на входе 35, соответствующему условию сч& хо разрешается выработка вторым элементом И 31 сигналов на втором тактовом выходе и через элемент НЕ 2/ прерывается выработка третьим элементом И 32 сигнала на третьем тактовом выходе, по которому также обнуляются счетчики 11 и 13. Одновременно включается триггер 33, на четвертом тактовом выходе вырабатывается потенциал перезаписи содержимого счетчика дистан0
5
0
0
5
ции 1 в регистры абсциссы 2 и обну- ляются регистры ординаты 3 и 8.
Импульсы, вырабатываемые генератором импульсов 28, поступают на вход запуска распределителя импульсов 29 и передаются с первого, второго и третьего выходов на вторые входы первого 30, второго 31 и третьего 32 элементов И соответственно. Сиг- налы с четвертого выхода распределителя импульсов 29 поступают на вход сброса триггера 33. На выходах элементов И 30, 31 и 32 и на выходе триггера 33 вырабатываются сигналы, которые поступают на с первого по четвертый тактовые выходы 37 блока 18. По сигналу на входе 36, поступающему на второй элемент И 31 и соответствующему условию счК --RK, прекращается функционирование устройства .
Формула изобретения Устройство для преобразования координат, содержащее первый регистр абсциссы, первый регистр ординаты, первый вычитатель, первый сумматор, регистр угла, два счетчика угла, счечик дистанции, два дешифратора, схему сравнения, причем выход первого регистра абсциссы и выход первого регистра ординаты соединены с входом уменьшаемого первого вычитателя и входом первого слагаемого первого сумматора соответственно, выход первого регистра абсциссы и выход пер- вого регистра ординаты соединены со сдвигом на К разрядов (К - константа итерации} в сторону младших разрядов с входом второго слагаемого первого сумматора и входом вычитаемого первого вычигателя соответственно, выходы первого вычитателя и первого сумматора соединены с информационными входами первого регистра абсциссы и первого регистра ординаты соответственно, вход аргумента устройства соединен с информационным входом регистра угла, выход первого счетчика угла соединен с входом первого дешифратора, выходы второго счетчика и регистра угла соединены соответственно с входами первого и второго операндов схемы сравнения, выход счетчика дистанции соединен с входом второго дешифратора и ин- формационным входом первого регистра абсциссы, выходы вычитателя и сумматора соединены с первыми выходами
0
5
5 5
0
0
5
0
абсциссы и ординаты устройства, о т- личающееся тем, что, с целью расширения класса решаемых задач за счет возможности поворота изображения в прямоугольных координатах, в него дополнительно введены второй регистр абсциссы, второй регистр ординаты, второй вычитатель, второй сумматор и блок управления, причем выход второго регистра абсциссы и выход второго регистра ординаты соединены с входом уменьшаемого второго вычитателя и с входом первого слагаемого второго сумматора соответственно, выход второго регистра абсциссы и выход второго регистра ординаты соединены со сдвигом на К разрядов в сторону младших разрядов с входом второго слагаемого второго сумматора и входом вычитаемого второго вычитателя соответственно, выходы второго вычитателя и второго сумматора соединены с информационными входами регистра абсциссы и регистра ординаты соответственно, выходы первого дешифратора, схемы сравнения и второго дешифратора соединены соответственно с входом признака граничного значения угла, входом режима работы и входом признака граничного значения дистанции блока управления, первый тактовый выход блока управления соединен с синхронизирующими входами второго регистра абсциссы ич второго регистра ординаты и счетным входом первого счетчика угла, второй тактовый выход блока управления соединен с синхронизирующими входами первого регистра абсциссы, первого регистра ординаты и счетным входом второго счетчика угла, третий тактовый выход блока управления соединен с входами сброса первого и второго счетчиков углов и счетным входом счетчика дистанции, четвертый тактовый выход блока управления соединен с входами разрешения записи первого и второго регистров абсциссы и входами сброса первого и второго регистров ординаты, выход счетчика дистанции соединен с информационным входом второго регистра абсциссы, выходы второго вычитателя и второго сумматора соединены с вторыми выходами абсциссы и ордина- ты устройства, выходы запрета и разрешения блока управления соединены с одноименными выходами устройства..
28
29
Я
Фиг. 2
| Устройство для анализа горных пород | 1939 |
|
SU60720A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для преобразования координат | 1985 |
|
SU1295386A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
