Изобретение относится к радиоле- кационной технике и предназначено для разрешения многозначности резуль татов измерений радиотехническими системами (РТС), работающими в час-, тотном режиме измерений, а также в режимах фазового зонда и радиолага. Известен способ разрешения многозначности результаггов измерений при определении местоположения подвижного объекта фазовыми или частотными радиотехническими системами (РТС), основанный на измерении фазовых или частотных характеристик, созданного ими электромагнитного поля, и сопротивлении их с результатами геодезических измерений 1 3Однако известный способ не дает возможности разрешить многозначность при прохождении базисов радиотехнической системы и их продолжений над сушей и акваториями с малыми глубинами, опасными для маневрирования Подвижного объекта.
- Цель изобретения - ускорение разрешения многозначности результатов измерений в любой точке зоны действия РТС.
Для достижения поставленной цели в способе разрешения многозначное-ти результатов измерений при определении местоположения подвижного объекта фазовыми или частотными радиотехническими системами (РТС) ,
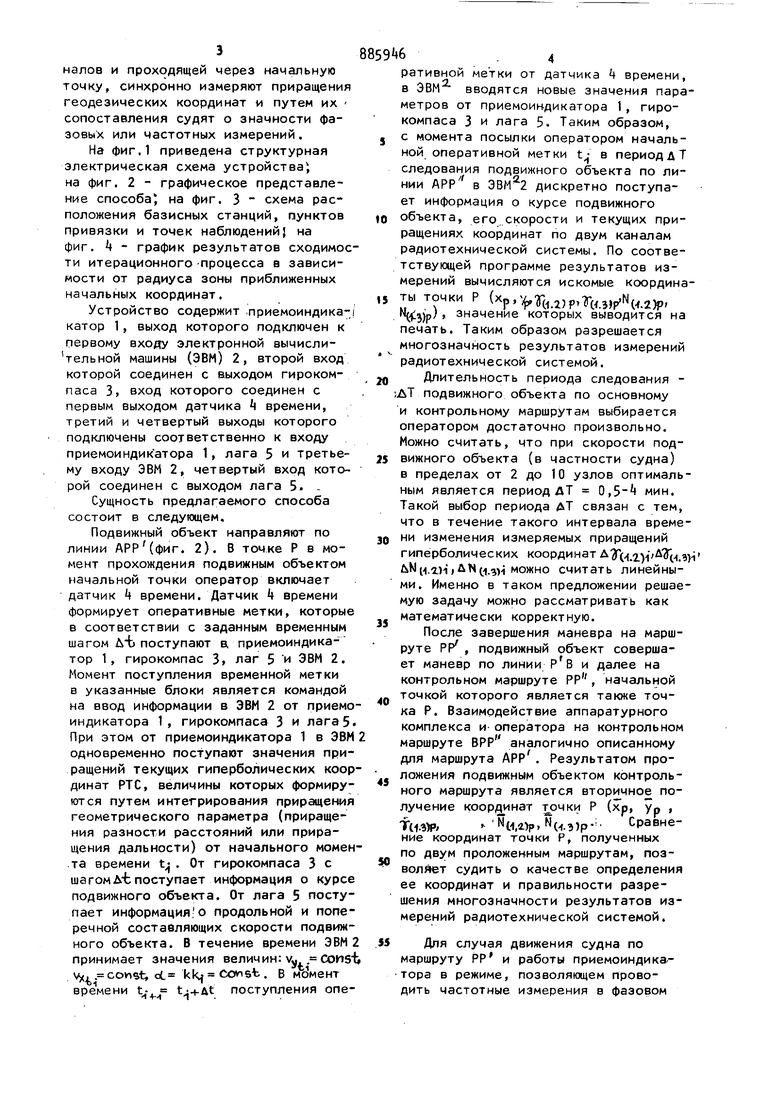
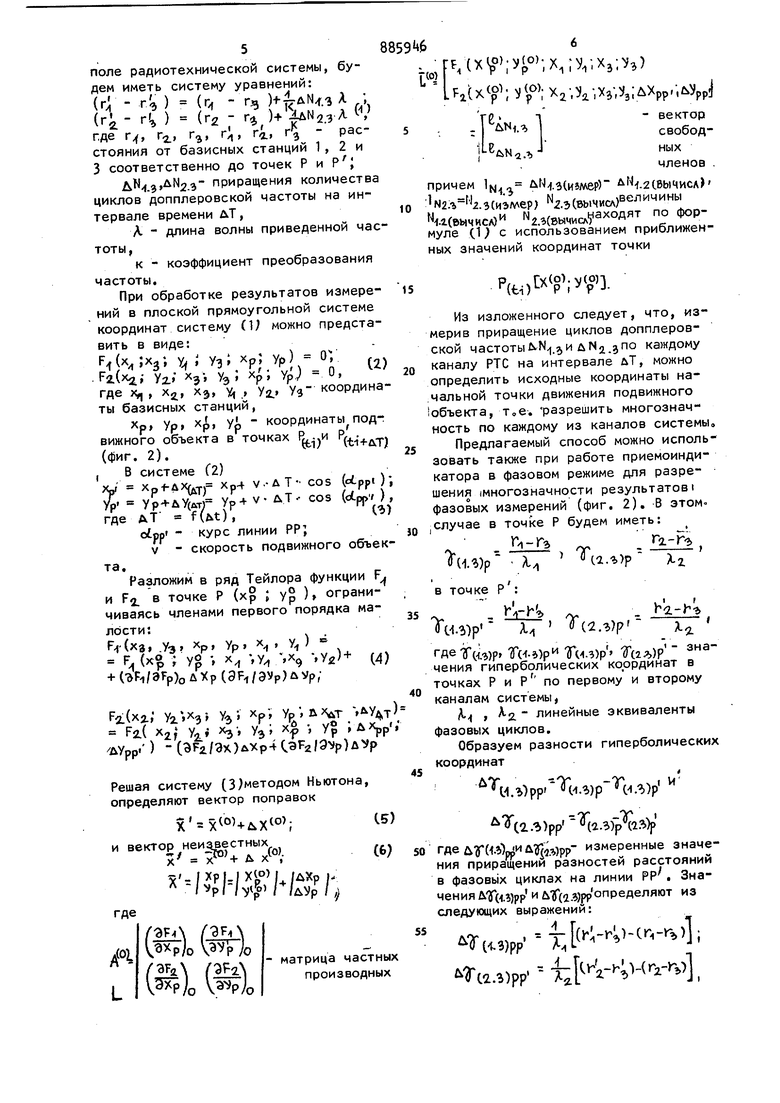
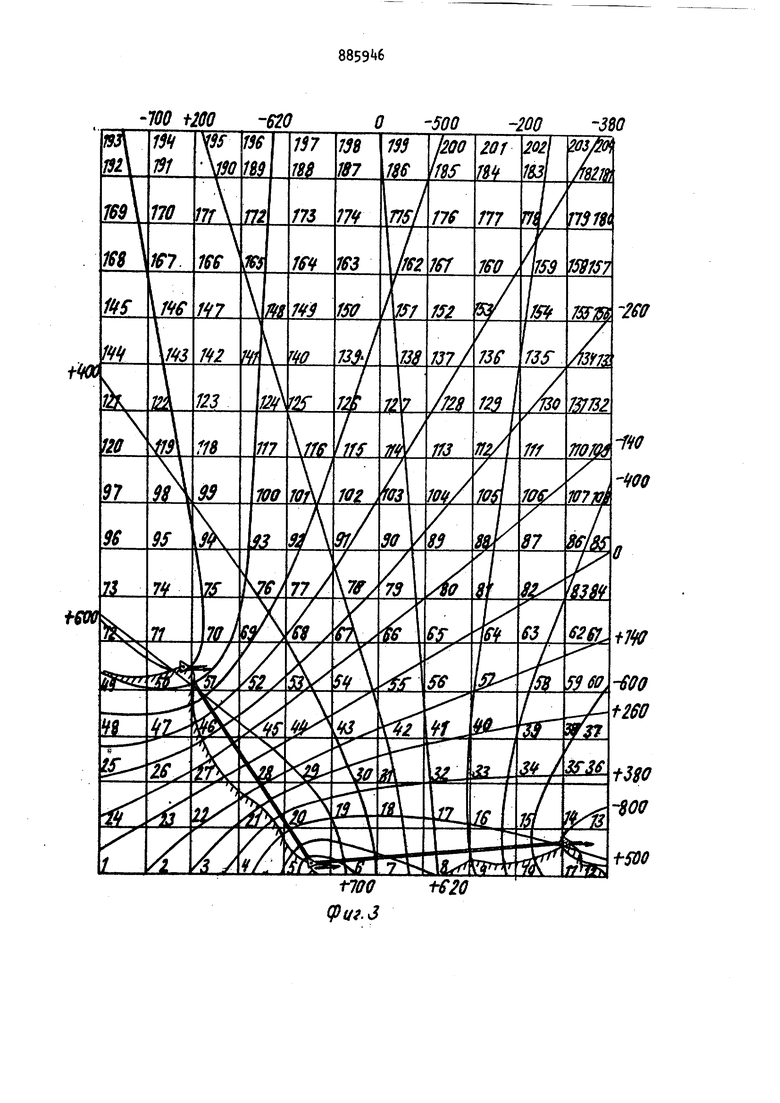
10 основанном на измерении фазовых или частотных характеристик, созданного ими электромагнитного поля, и сопоставлении их с результатами геодезических измерений, измеряют в начальtsной точке разность фаз или начальную частоту по каждому каналу РТС, затем измеряют приращения разности фаз или приращения количества циклов допплеровской частоты по каж20дому каналу РТС в течение вьйранного интервала времени следования подвижного объекта по локсодромии, нормальной к изолиниям одного из каналов и проходящей через начальную точку, синхронно измеряют приращения геодезических координат и путем их сопоставления судят о значности фазовых или частотных измерений. На фиг,1 приведена структурная электрическая схема устройства, на фиг. 2 - графическое представление способаJ на фиг. 3 схема расположения базисных станций, пунктов привязки и точек наблюдений} на фиг, k - график результатов сходимос ти итерационного -процесса в зависимости от радиуса зоны приближенных начальных координат. Устройство содержит .приемоиндикакатор 1, выход которого подключен к первому входу электронной вычислиЧельной машины (ЭВМ) 2, второй вход которой соединен с выходом гирокомпаса 3, вход которого соединен с первым выходом датчика времени, третий и четвертый выходы которого подключены соответственно к входу приемоиндикатора 1, лага 5 и третьему входу ЭВМ 2, четвертый вход которой соединен с выходом лага 5. Сущность предлагаемого способа состоит в следующем. Подвижный объект направляют по линии АРР(фиг. 2). В точке Р в момент прохождения подвижным объектом начальной точки оператор включает датчик времени. Датчик Ц времени формирует оперативные метки, которые в соответствии с заданным временным шагом поступают в, приемоиндикатор 1, гирокомпас 3 лаг 5 и ЭВМ 2. Момент поступления временной метки а указанные блоки является командой на ввод информации в ЭВМ 2 от приемо индикатора 1, гирокомпаса 3 и лага 5 При этом от приемоииди катора 1 в ЭВМ одновременно поступают значения приращений текущих гиперболических коор динат РТС, величины которых формиру ются путем интегрирования приращения геометрического параметра (приращения разности расстояний или приращения дальности) от начального моме та времени t . От гирокомпаса 3 с шагомАЬ поступает информация о курсе подвижного объекта. От лага 5 посту пает информацияо продольной и попе речной составляющих скорости подвиж ного объекта. В течение времени ЭВМ принимает значения величин:у СОИ5 . оС kkf COMst. В момент поступления опе времени t 6 . 4 ративной метки от датчика k времени, в ЭВМ вводятся новые значения параметров от приемоиндикатора 1, гирокомпаса 3 и лага 5. Таким образом, с момента посылки оператором начальнои оперативной метки t- в период л Т следования подвижного объекта по линии АРР в дискретно поступает информация о курсе подвижного объекта, его.скорости и текущих приращениях координат по двум каналам радиотехнической системы. По соответствующей программе результатов измерений вычисляются искомые координаТЫ точки Р (xp.rc,.i))PN(..2)p, (З)- значение которых выводится на печать. Таким образом разрешается многозначность результатов измерений радиотехнической системой. Длительность периода следования Т подвижного объекта по основному и контрольному маршрутам выбирается оператором достаточно произвольно. Можно считать, что при скорости подвижного объекта (в частности судна) в пределах от 2 до 10 узлов оптимальным является период ДТ 0,5 мин. Такой выбор периода ЛТ связан с тем, что в течение такого интервала времени изменения измеряемых приращений гиперболических координат T((.i)(,3)i &Nn.a)(i.3)i можно считать линейными. Именно в таком предложении решаемую задачу можно рассматривать как математически корректную. После завершения маневра на маршруте РР , подвижный объект совершает маневр по линии РВ и далее на контрольном маршруте РР, начальной точкой которого является также точка Р. Взаимодействие аппаратурного комплекса и оператора на контрольном маршруте ВРР аналогично описанному для маршрута АРР. Результатом проложен ия подвижным объектом контрольного маршрута является вторичное получение координат ;пэчки Р (хр, ур , Т(1.з№/ Мс1,4)рДаэ)р- Сравнение координат точки Р, полученных по двум проложенным маршрутам, позволйет судить о качестве определения ее координат и правильности разрешения многозначности результатов измерений радиотехнической системой. Для случая движения судна по маршруту РР и работы приемоиндикатора в режиме, позволяющем проводить частотные измерения в фазовом поле радиотехнической системы, бу«дем иметь систему уравнении: дем иметь систему уравнений: (г; - г ) (Cf - гзз .з Л /. L : Ч ( Г t, 2.- -г ) (Г2 - r HJuN2.3 где r, r,2., r, r, r, r - расстояния от базисных станций 1 , 2 и 3 соответственно до точек Р и Pj N j,AN2.3 приращения количества циклов допплеровской частоты на интервале времени ДТ, Л длина волны приведенной час тоты, к - коэффициент преобразования частоты. При обработке результатов измерений в плоской прямоугольной системе координат систему () можно представить в виде: РЛХ,;ХЗ; Yf i УЗ хр; ур) о; FZ(X2L; YZ ХЭ УЭ Р ф/ ° где х , x,j, хэ, у, , У2,, УЗ- координа ты базисных станций, Хр, Ур, х, у - координаты подг вижного объекта в точках fLi) f fti+AT) (фиг. 2). В системе (2) Хр4 v.-дТ- cos () р (лт1 V- Л.Т, cos (ctppJ ) где AT f(b.t),С otpp - курс линии РР V - скорость подвижного объек та. Разложим в ряд Тейлора функции F. и F. в точке Р (хр ; ур ) ограничиваясь членами первого порядка малости:Pl-(x3f .УЗ р Ур« N У f (х ; У ; х у -.х , 4) + (- Fi/aFp)oAXpOFi/aVp)uyp/ F2:(xz; % ,т Fi( Хз, УЗ х; , у« ;АХрр ДУрр ) - C3F2L/9x)AXp4 ;эР2|9 р)Д Vp Решая систему (З)методом Ньютона, определяют вектор поправок x , и вектор неи естных 1J д AVp / ,; /9FA ,ОХр)о VBVT/O - матрица частных 3 пца .р)о VWJo производных co).MV.:X3;v,) lOi I 1 «/ ...ji pp- V Ye;.. V вектор свободныхчленов . причем IN .(MJMep)- лМ.2(вь)ЧисА) .з( .свычи еличины -КвычисА) (вь, по формуле (1 с использованием приближенных значений координат точки Из изложенного следует, что, измерив приращение циклов допплеровской частотыC N и дN2.3по каждому каналу РТС на интервале дТ, можно определить исходные координаты начальной точки движения подвижного объекта, т,е. разрешить многозначность по каждому из каналов системы Предлагаемый способ можно использовать также при работе приемоиндикатора в фазовом режиме для разрешения 1многозначности результатов фазовых измерений (фиг. 2). В этом случае в точке Р будем иметь: л, . IVJCS , лр . L , Оаг)р Х и.г)р Хг в точке Р: . . Н1.3)р Х ((2.г)р х ГДеТу-З). Тн.)рИТ(.,)р , T(j;,,)p ения гиперболических координат в очках Р и Р по первому и второму каналам системы, 2. линейные эквиваленты азовых циклов. Образуем разности гиперболических оординат .Ь).г).г)р 2(2.г)рр (2.3)&3)р де ( .5рр- измеренные значеия приращении разностей расстояний фазовых циклах на линии РР. Знаения ДХо.) и Д1Г(1.)рр определяют из ледующих выражений: .ВДРР- тД -- - b 1 Тс2.г)рр )j Значения свободных членов получают из выражений: ч.з (|.г)рр (вьщисл) и.з)рр {мвме ..г)ррЧшмисл),, |-де (Г(1.5)рр(р.ычисА) ТГ(2.(БЬ1ЧУ1слГ определяют по формуле (ч) с испольэо вгнием приближенных значений координат х , уо . Дальнейшее решение задачи по определению координат в фазовом методе строится по схеме, приведенной для частотного метода измерений. И так, предлагаемый итерационный метод позволяет устранить многозначьость результатов как при частотном, так и при фазовом методе измерений. Таким образом, использование пред лагаемого способа разрешения многозначности результатов измерений при определении местоположения подвижного объекта фазовыми или частотными радиотехническими системами позволит существенно ускорить разрешение мнонозначности результатов измерений в .П1обой точке зоны действия РТС, на bO-80 сократить затрачиваемое на нее время и средства, и исключить не обходимость создания стационарной опорной геодезической сети на поверх ности моря при удалении от берега до км. В случаях же, когда :;аличие такой сети является необходи мым, предлагаемый способ позволит оп|зеделить координаты ее пунктов при отсутствии береговых геодезических пунктов или видимости на них с пунктов морской сети. Все это приведет к значительному сокращению непроизводительных затрат времени и средств прр выполнении любых морских работ t использованием для них геодезической привязки фазовых или частотных радиотехнических систем, при работе на подвижном объекте в фазовом и частотном режимах измерений. Формула изобретения Способ разрешения многозначности результатов измерений при определений местоположения подвижного объекта фазавыми или частотными радиотехническими системами (РТС), основанный на измерении фазовых или частотных характеристик, созданного ими электромагнитного поля, и сопоставлении их с результатами геодезических измерений, отличающийс я тем, что, с целью ускорения разрешения многозначности результатов измерений в любой точке зоны действия РТС, измеряют в начальной точке разность фаз или начальную частоту по каждому каналу РТС, затем измеряют приращения разности фаз или приращения количества циклов допплеровской частоты по каждому каналу РТС в течение выбранного интервала времени следования подвижного объекта по локсодромии, нормальной к изолиниям одного из каналов и проходящей через начальную точку, синхронно измеряют приращения геодези- , ческих координат и путем их сопоставления судят о значности фазовых или частотных измерений. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2733527/10, кл. G 01 С 3/02, 31 ,10Л979о
./
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Способ нейтрализации погрешностей подвижных бесплатформенных инерциальных геодезических систем | 2019 |
|
RU2729226C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| ПРИЕМОИНДИКАТОР | 1990 |
|
SU1814387A1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |

/ Л ril Кз y/j -т fioo -620
Т. 30
/5
10
2 3 f
1153
