1
Изобретение относится к геодезической измерительной технике и предназначено для определения координат исходных точек маршрутов, прокладыBaet-«jx в процессе геодезической привязки ropcкиx научно-исследовательских или поисково-разведочных работ радиогеодезическими системами, работ-аюшими в режимах фазового зонда или радиолага.
Известен способ геодезической првязки исходных точек маршрутов, прокладываемых геодезическими системами , работакяцими в режимах фазового зонда или радио.11ага,, заключающийся в выставлении отсчетов на счетчиках регистрирующего устройства подвижно станции, соответствующих значениям координат опорного пункта, расположенного в фазовом поле, создаваемом радиоизлучением.базисных станций системы. Для реализации данного способа вблизи берега создают опорную сеть, пункты которой на поверхности моря закрепляют вехами или буями на якорях. Координаты вех .определяют известными методами с пунктов береговой опорной геодезической сети, которая специгшьно создается для этих целей вблизи
района работ. Для осуществления при вязки судно должно пройти в непосредственной близости от опорной точки l .
Недостатком этого способа является необходимость создания опорной геодезической сети с закрепленными на поверхности моря пунктами. На ее создание затрачивается до 30%
0 рабочего времени, а стоимость составляет около 10% общей сметной стоимости работ. В случае утери поверхностного знака опорного пункта в шторм И.ПИ в результате сноса судами 5 задача привязки решена быть не может, Наличие существенных погрешностей, свойственных процессу привязки радиогеодезических ходов к поверхностным знакам,. также является не0достатком способа.
Наиболее близким к предлагаемому по технической сущности является способ определения координат точек маршрутов радиогеодезических систем,
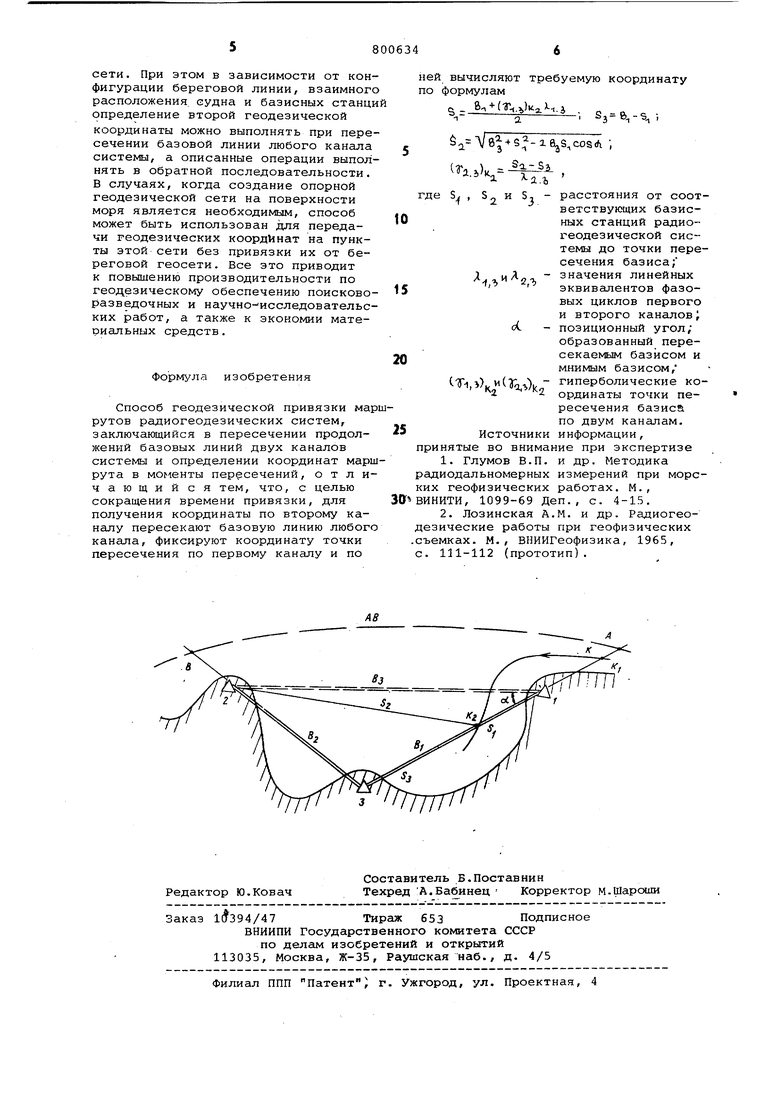
5 в котором исходные координаты маршрута получаются путем пересечения продолжений базовых линий в и Вд первого.и второго каналов системы, например в точке А и точке В со0ответственно. При этом в точке А определяется координата 3 по первому каналу системы, а в точке В определяется координата Уд о второму канапу. В совокупности Тал однозначно определяют плановое положение судна в системе координат базовых станций 1-3 23. Недостатком этого способа является большая трудоемкость, заключающаяся в необходимости осуществления плавания по трассе АВ. Имея в виду, что длины В и БЗ не менее 100 км, можно заключить, что, производя при вязку, судно должно пройти маршрут порядка 150 км и затратить на это не менее 8 часов. С учетом того, чт процесс привязки должен осуществлят ся дважды в сутки, становится ясно, что этот способ определения координат исходных точек радиогеодезических ходов при выполнении научно-исследовательских с поисково-разведоч ных работ практически не применим. Цель изобретения - сокращение вр мени привязки. Поставленная цель достигается тем, что в способе геодезическрй привязки маршрутов радиогеодезически систем, заключающемся в пересечении продолжений базовых линий двух кана лов системы и определении координат маршрута в моменты пересечений, для получения координаты по второму каналу пересекают базовую линию любог канала, фиксируют координату точки пересечения по первому каналу и по ней вычисляют требуемую координату по формулам .B.HT...V, л.,. ,.,,,. 52 -{в|ТР 2Ь в соз 1; ,)К:, S , S 2 м S т, - расстояния от с ответствующих базисных станций радиогеодезическойсистемы до точки пересечения базиса ,-Ь 1Л - значения линейных эквивалентов фазовых циклов первого и второго каналов - позиционный угол, образованный пересекаемым базисом и мнимым базисом, гиперболические СТ1Л)К5, координаты точки пересечения базиса по двум каналам. На чертеже изображен способ геоде зической привязки маршрутов. Способ заключается в следующем. Судно, перемещаясь по линии К, в точке К пересекает продолжение . В момент прохождения продоля базы меняется знак приращения вых циклов на ленте самописца го из каналов (1-3. То.чке смены а приращения фазовых циклов на ограмме соответствует гиперболикая координата(), станции 1. Перемещаясь далее по линии К, но пересекает базу В в точке К. омент прохождения точки К 2 знак ращения фазовых циклов по каналу 3 ) вновь сменится на противополож. Для точки К2. составлена следующая тема уравнений ...)6. 3.-и5 V V 2% 2. I S , S и S, - расстояния от соответствующих базисных станций радиогеодезическойсистемы до точки Kgna линии базиса В ; -линейный эквивалент фазового цикла канала (1-3) , -гиперболическая координата точки К по каналу (1-3)) -позиционный угол, образованный базисом В и мнимым базисом БЗз решений системы S - .г.Ка.-1.з -1 U -3. и S2 определяется выражением (3). Втор-ая гиперболическая координата (Тз.ъ) точки К 2 определится из соотношения Sg-Sj (Т - аг-а ТГ где п, линейный эквивешент фазово го цикла канала (2-3). Предлагаемый способ определения геодезических координат точек маршрутов геодезических систем позволяет существенно упростить процесс привязки, на 30-40% сократить затрачиваемое на нее время и исключить создание опорной геодезической сети на поверхности моря для акваторий, удаленных на 80-100 км от береговой линии. Применение способа не зависит от наличия береговой геодезической
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ связи между пересекающимися маршрутами аэрофотосъемки | 1960 |
|
SU140219A1 |
| Способ разрешения многозначности результатов измерений при определении местоположения подвижного объекта фазовыми или частотными радиотехническими системами (ртс) | 1980 |
|
SU885946A1 |
| Устройство для определения геодезических прямоугольных координат по результатам измерений фазовыми радиогеодезическими системами гиперболических координат | 1973 |
|
SU440669A1 |
| Способ определения расстояния между базисными радиогеодезическими станциями фазовой системы | 1961 |
|
SU149576A1 |
| УСТРОЙСТВО ДЛЯ МАРКШЕЙДЕРСКОЙ СЪЕМКИ ЗАБОЯ ПРИ ДРАЖНОЙ РАЗРАБОТКЕ РОССЫПИ | 1990 |
|
RU2049310C1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Способ разбивки геодезического обоснования топографической съемки земной поверхности | 1987 |
|
SU1520337A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ ОБЪЕКТОВ | 2021 |
|
RU2759799C1 |
