1
Изобретение относится к радиолокационной и радионавигационной технике и может использоваться в приемоиндикаторах импульсно-фазовых радионавигационных систем.
Известно устройство для измерения временных интервалов, содержащее измерительный блок, включенный на выходе приемника и состоящий из узлов грубого и точного отсчета и узла устранения многозначности. Недостаток известного устройства состоит в низкой достоверности устранения многозначности отсчетов измеренных временных интервалов при наличии сильных помех (т. е. в установившемся режиме работы больщое количество отсчетов временных интервалов имеет неустраненную многозначность), что объясняется конечной шириной полосы пропускания узла грубого отсчета. Полоса пропускания узла грубого отсчета не может быть значительно сужена, Так как при этом с увеличением достоверности устранения многозначности увеличивается время переходного процесса после включения приемоиндикатора, что не всегда допустимо. Кроме того, сужение полосы пропускания может ограничиваться динамикой изменений измеряемых временных интервалов.
Цель изобретения - повышение достоверности при устранении многозначности отсчетов измеряемых временных интервалов.
2
Эта цель достигается введением включенных последовательно схемы обнаружения скачков отсчета, интегратора, узкополосного фильтра, формирователя сигнала коррекции
и блока коррекции временных интервалов, причем выход измерительного блока соединен одновременно со схемой обнаружения скачков отсчета и вторым входом блока коррекции временных интервалов, а выход интегратора
подключен к второму входу формирователя сигнала коррекции.
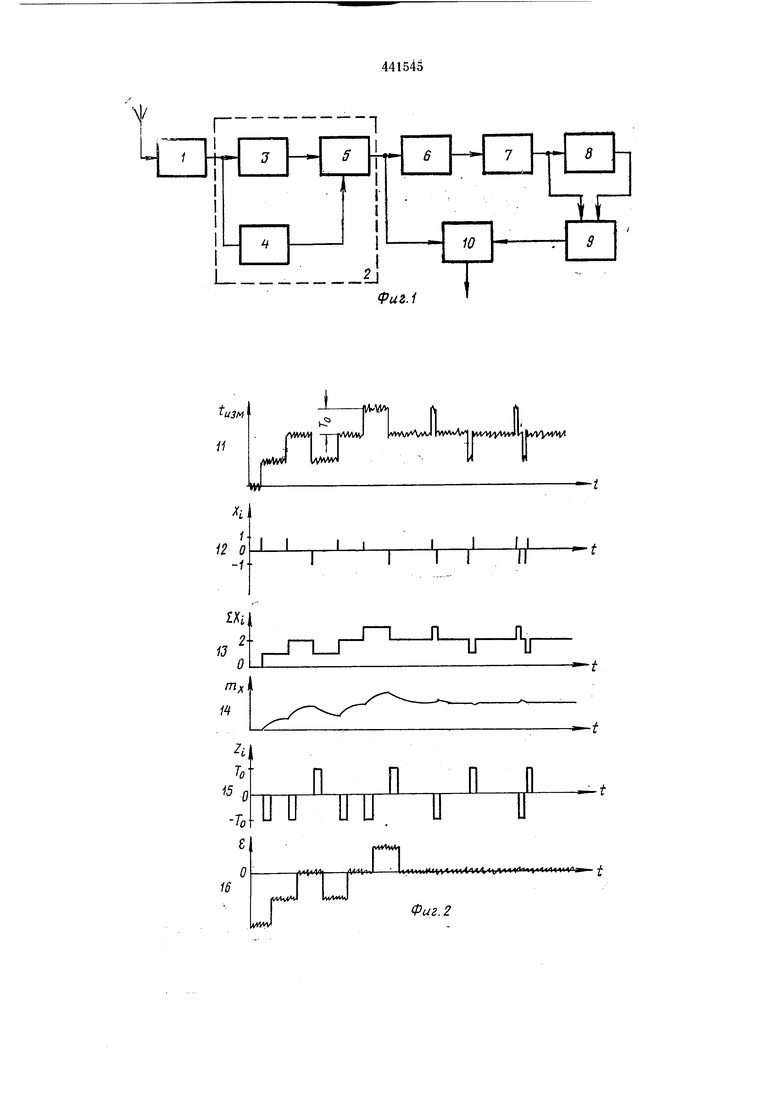
На фиг. 1 представлена блок-схема предложенного устройства для измерения временных интервалов; на фиг. 2 - графики, поясняющие его работу.
Устройство содержит последовательно включенные приемник 1, измерительный блок 2, состоящий из узла 3 грубого и узла 4 точного отсчетов и узла 5 устранения многозначности,
схему б обнаружения скачков отсчета, интегратор 7, узкополосный фильтр 8, формирователь 9 сигнала коррекции и блок 10 коррекции временных интервалов, причем выход измерительного блока 2 соединен одновременно со
схемой 6 обнаружения скачков отсчета и вторым входом блока 10 коррекции временных интервалов, а выход интегратора 7 подключен к второму входу формирователя 9 сигнала коррекции.
3
Устройство работает следующим образом.
Импульсные радиосигналы передающих станций радионавигациопной системы поступают на вход приемника 1, где фильтруются по частоте, и передаются далее в измерительный блок 2. В узле 3 грубого отсчета измерительного блока 2 измеряется временной интервал между отсчетными точками огибающих радиоимпульсов ведущей и ведомой станций, а в узле 4 точного отсчета измеряется разность фаз высокочастотных заполнителей этих радиоимпульсов. По полученным грубому и точному отсчетам в узле 5 устранения многозначности вычисляется отсчет измеряемого временного интервала.
Процесс измерения во времени отсчетов измеряем,ого временного интервала на выходе измерительного блока 2 иллюстрируется графиком 11 (фиг. 2).
Начальный участок графика 11 соответствует переходному процессу в измерительном блоке. 2; скачки в сторону увеличения или уменьшения отсчетов вызваны работой узла 5 устранения многозначности. Величины скачков равны периоду То высокочастотного заполнения радиоимпульсов.
В .схеме 6 обнаружения скачков отсчета вычисляется величина скачка отсчета по алгоритму:
1 при /;- / 1 Го-АГо; xi -1 при ti - -(Т, АГо); о при ti ti-i Го - АГо,
где ti - текущий отсчет измеряемого временного интервала в момент времени i (1, 2, ...,п); ti-i - предыдущий отсчет измеряемого временного интервала в момент времени i-1; АТо - допустимая ошибка измерения
временного интервала.
Работа схемы 6 обнаружения скачков отсчета иллюстрируется графиком 12 (фиг. 2). Значения скачков отсчета x,i поступают на вход интегратора 7, где формируется величина
п
S x,i (график 13). Результат суммирования
лодается на узкополосный фильтр 8, полоса пропускания которого в несколько раз уже полосы узлов 3 грубого и 4 точного отсчетов измерительного блока 2.
На входе узкополоспого фильтра 8, по окончании переходного процесса в нем, вырабатывается величина т, являющаяся средним знап
чением-суммы 2 t (график 14). Сравнение
п
текущего значения суммы 2 с ее средним .значением Шх в формирователе 9 сигнала коррекции позволяет формировать сигнал коррекции отсчета по алгоритму:
-Го при д:г-/и А;
г 1
2, :--- при А;
i--l
о при
А,
2 - т
1 1
где А - допустимое отклонение результата
сравнения.
Выработанный сигнал коррекции (график 15) поступает в блок 10 коррекции временных интервалов, в котором текущий отсчет измеряемого временного интервала ii изменяется на величину сигнала коррекции 2;. Скорректированный отсчет измеряемого временного интервала поступает на выход устройства.
Поведение ошибки измерения временного интервала е после коррекции:
, - / f
изм -ИСТ
где /ист - текущее значение истинного временного интервала,
иллюстрируется графиком 16. Из графика следует, что по окончапии переходного процесса в измерительном блоке 2 ошибки в отсчетах отсутствуют, в то время как на графике 11 (фиг. 2) они есть. Так как при работе измерительного блока 2 (по окончании переходного процесса) основная масса отсчетой - это отсчеты с устраненной многозначностью, то на выходе узкополосного фильтра 8 вырабатывается величина т, соответствующая устраненной многозначности отсчетов, что и позволяет выделить отсчеты с неверно устраненной многозначностью и скорректировать их перед дальнейшим использованием.
Предмет изобретения
Устройство для измерения временных интервалов, содержащее измерительный блок, включенный на выходе приемника и состоящий из узлов грубого и точного отсчета и узла устранения многозначности, отличающееся
тем, что, с целью повышения достоверности при устранении многозначности отсчетов измеряемых временных интервалов, в устройство введены включенные последовательно схема обнаружения скачков отсчета, интегратор, узкополосный фильтр, формирователь сигнала коррекции и блок коррекции временных интервалов, причем выход измерительного блока соединен одновременно со схемой обнаружения скачков отсчета и вторым входом блока
коррекции временных интервалов, а выход интегратора подключен к второму входу формирователя сигнала коррекции.
, Т
Фиг.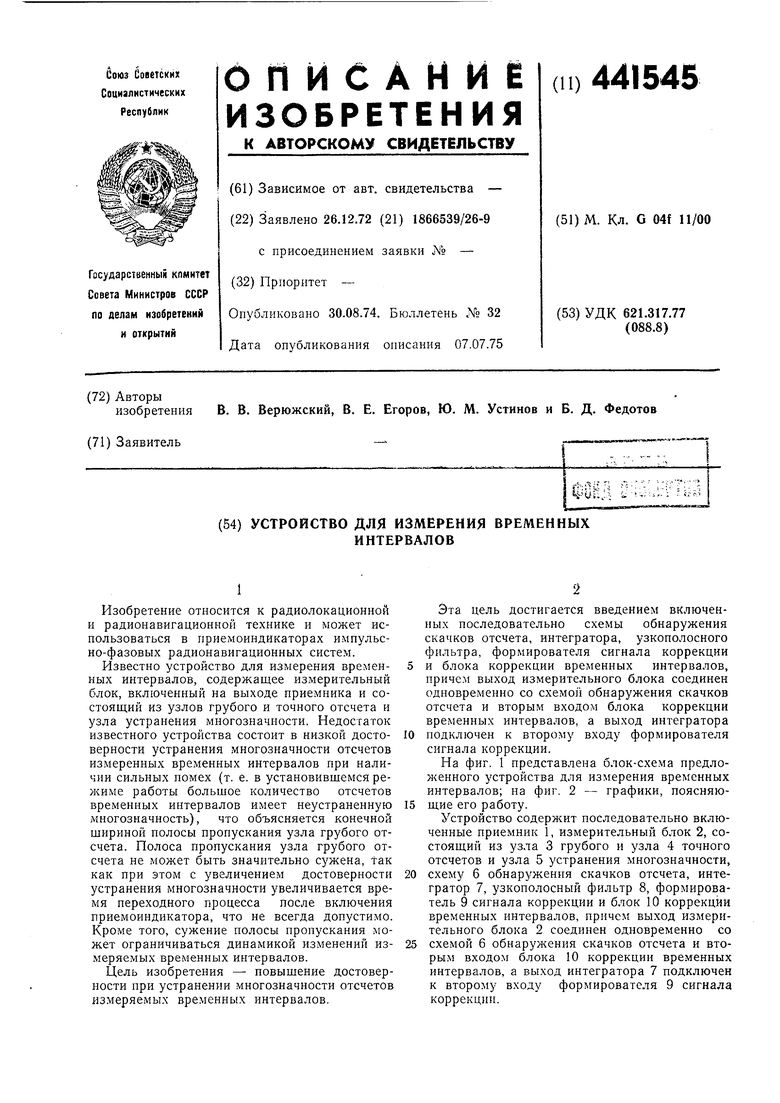
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временных интервалов | 1981 |
|
SU983645A2 |
| Устройство для измерения временного положения импульса | 1989 |
|
SU1709267A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1992 |
|
RU2042144C1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| ПРИЕМОИНДИКАТОР | 1990 |
|
SU1814387A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ БОРТОВОЙ И НАЗЕМНОЙ ПРИЁМОПЕРЕДАЮЩИМИ СТАНЦИЯМИ | 2015 |
|
RU2587471C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ФАЗОВАЯ РАДИОГЕОДЕЗИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2088948C1 |
| Устройство автоматической привязки местной шкалы времени к сигналам точного времени | 1981 |
|
SU1016765A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU976427A1 |