Изобретение относится к вычисли тельной технике и может быть использовано в раДиолокационных и радионавигационных устройствах.
По основному авт. св. 530313 известно устройство для измерения временных интервалов,содержащее приемник , блок грубого и блок точного отсчета, блок устранения многозначности, блок вычитания, вычислитель прправки и Сглаживающий фильтр 1.
Недостатком его является наличие ошибок в измерении временных интервалов , вызванных разбалансом амплитуд принимаемых сигналов на входе приемника, обусловлен различными удалениями от объекта до каждой из станций радионавигационной системы.
Цель изобретения - повышение точности измерений.
Поставленная цель достигается тем, что в устройство, содержащее приемник, вглход которого подключен к входу блока точного отсчета и через блок грубого отсчета к первому входу блока вычитания, второй вход которого подключен к выходу сглаживающего фильтра, а выход - к первым входам блока устранения многозначнести и вычислителя поправки, выход которого соединен с входом сглажива ющего фильтра, введен блок компенсации схиибок, первый вход которого подключен к выходу блока точного отсчета, второй вход соединен с 111иной исходных данных, а выход - с вторьв4и входами вычислителя поправки и блока устранения многозначности, а,
10 кроме того, блок компенсации ошибок содержит последовательно соединенные блок сравнения и блок постоянной памяти, а также два арифметических блока и блок оперативной памяти, при15чем первый и второй выходы блока постоянной памяти соединены .соответственно с первым и вторым входами первого арифметического блока, третий вход которого соединен с одним из
20 входов блока сравнения и вторым входом блока компенсации ошибок, а выход - с входом блока оперативной памяти, первый и второй выходы которого подключены соответственно к
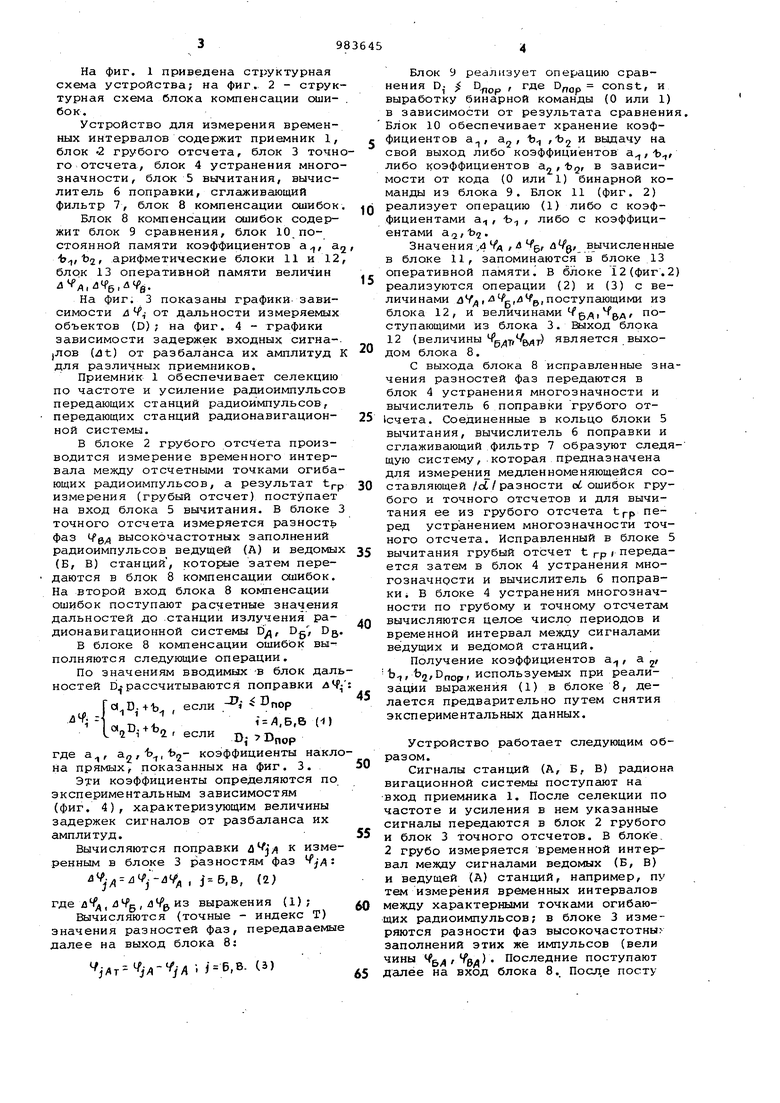
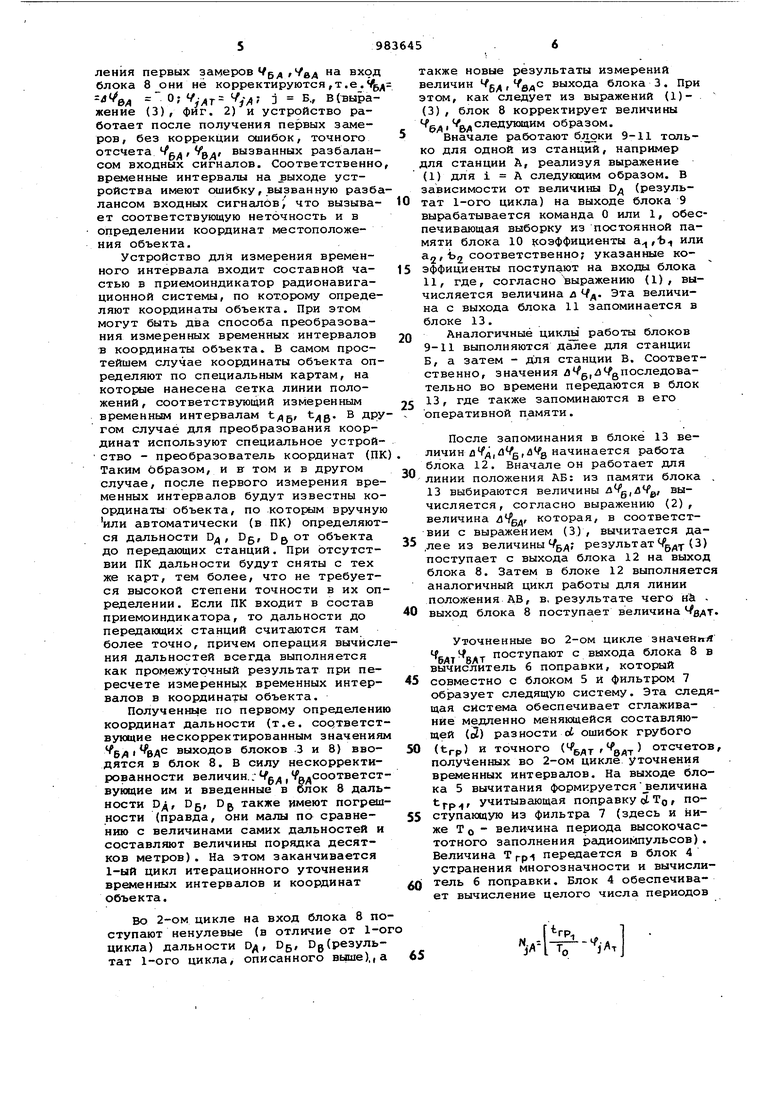
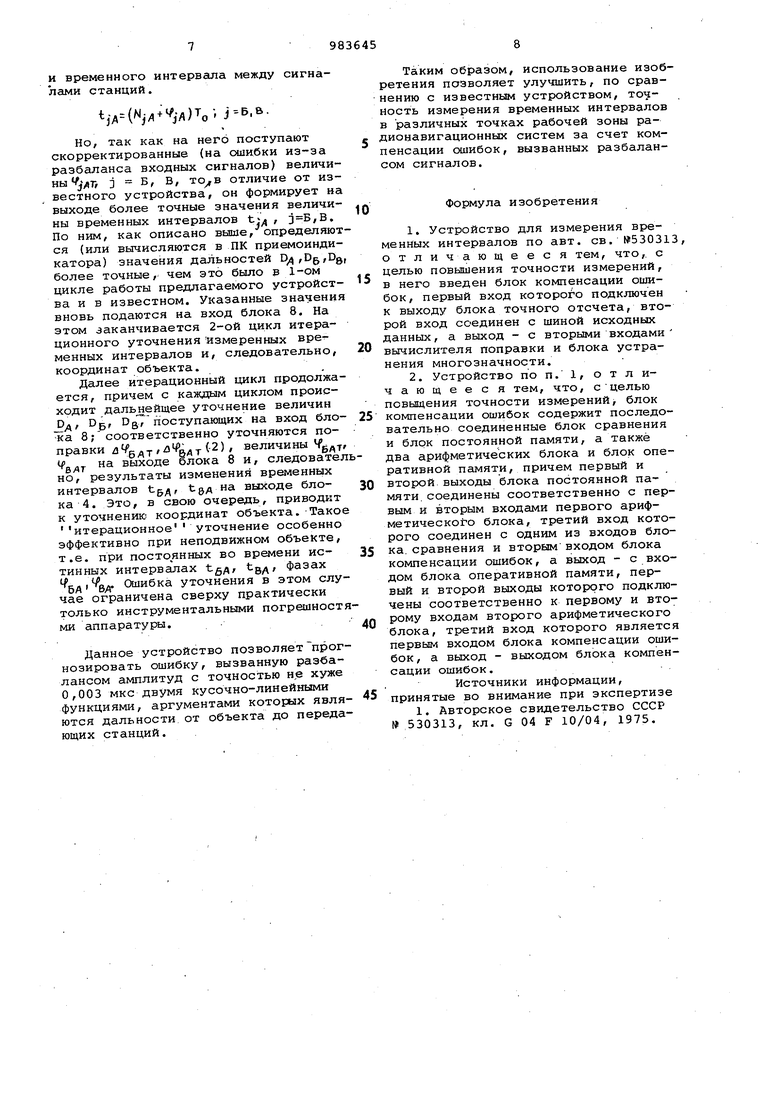
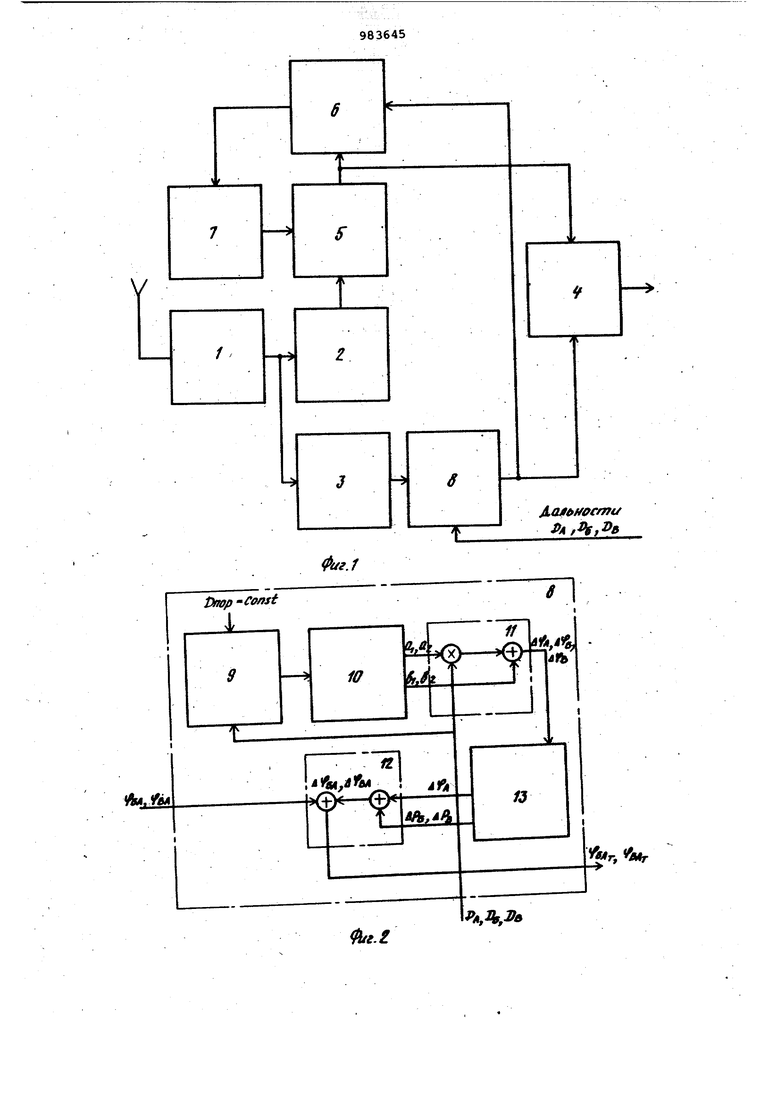
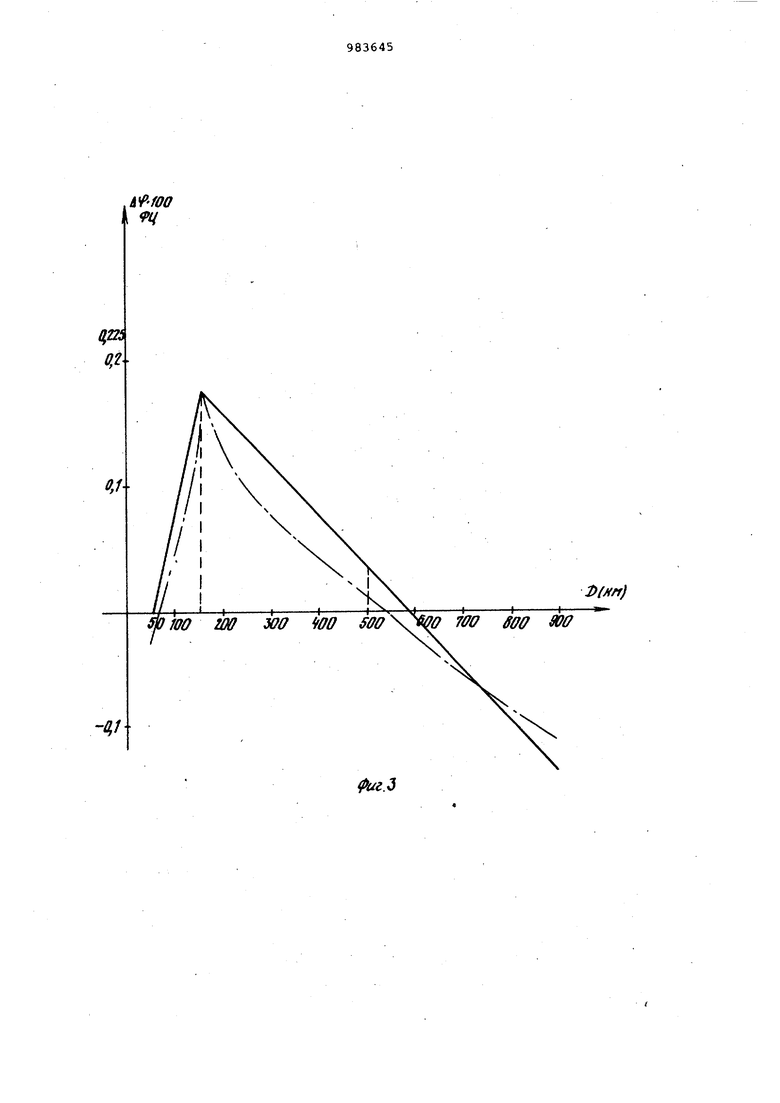
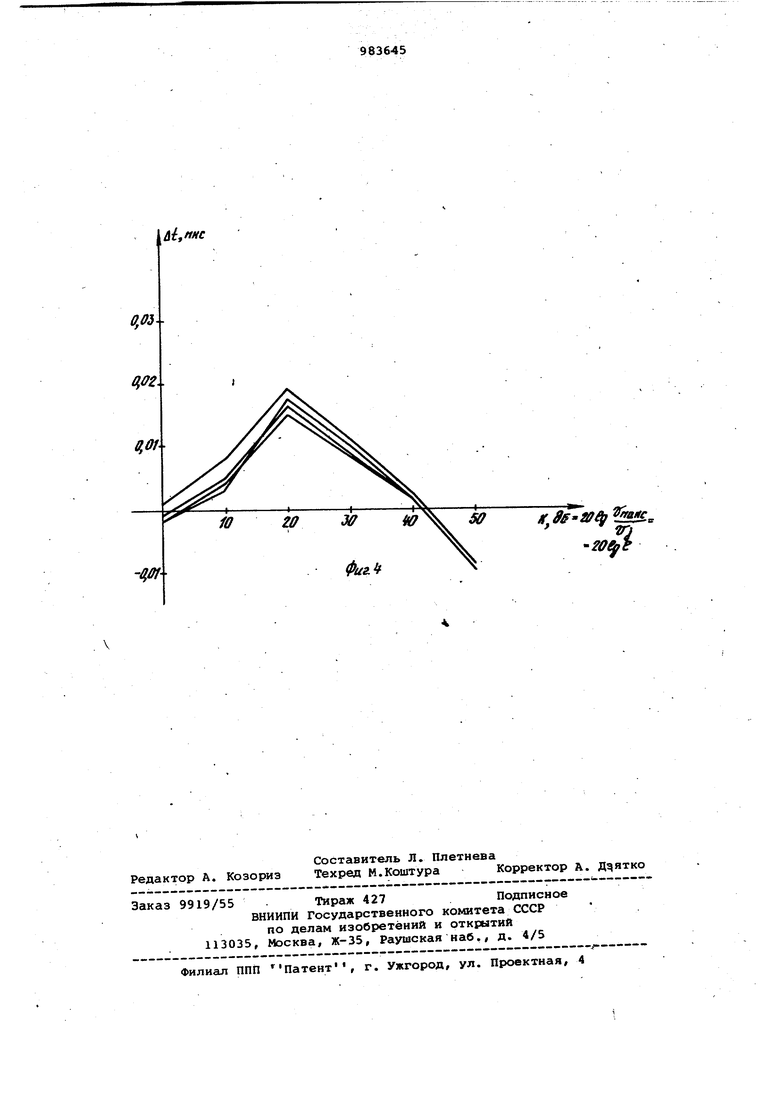
25 первому и второму входам второго арифметического блока, третий вход которого является первым входом блока компенсации ошибок, а выход -.выходом блока компенсации оши30бок. На фиг. 1 приведена структурная схема устройства; на фиг. 2 - струк турная схема блока компенсации сяиибок. Устройство для измерения временных интервалов содержит приемник 1, блок «2 грубого отсчета, блок 3 точн го отсчета, блок 4 устранения много значности, блок 5 вычитания, вычислитель 6 поправки, сглаживающий фильтр 7, блок 8 компенсации ошибок Блок 8 компенсации ошибок содержит блок 9 сравнения, блок 10 постоянной памяти коэффициентов а,,, а Ь, to2f арифметические блоки 11 и 12 блок 13 оперативной памяти величин лЧд.лЧб.. На фиг. 3 показаны графики зависимости л V,- от дальности измеряемых объектов (D); на фиг. 4 - графики зависимости задержек входных сигна)Лов (dt) от разбаланса их амплитуд для различных приемников. Приемник 1 обеспечивает селекцию по частоте и усиление радиоимпульсо передающих станций радиоимпульсов, передающих станций радионавигационной системы. В блоке 2 грубого отсчета производится измерение временного интервала между отсчетными точками огиба ющих радиоимпульсов, а результат tp измерения (грубый отсчет) поступает на вход блока 5 вычитания. В блоке точного отсчета измеряется разность фаз -fQA высокочастотных заполнений радиоимпульсов ведущей (А) и ведомы (Б, В) станций , котоЕхле затем передаются в блок 8 компенсации гааибок. На второй вход блока 8 компенсации ошибок поступают расчетные значения дальностей до станции излучения радионавигационной системы D, Dg, Dg В блоке 8 компенсации ошибок выполняются следующие операции. По значениям вводимых -в блок даль ностей D -рассчитываются поправки дЧ .+Ъ , если 1 Х1,Б,в (1) .«а. если D,- Впор где а, а.,Ь, коэффициенты накло на прямых показанных на фиг. 3. Эти коэффициенты определяются по экспериментальным зависимостям (фиг. 4), характеризующим величины задержек сигналов от разбаланса их амплитуд. Вычисляются поправки к измеренным в блоке 3 разностям фаз . Г-Б, В, (1) где ,/jMg,/jVg из выражения (1); Шлчисляются (точные - индекс Т) значения разностей фаз, передаваемые далее на выход блока 8: jAr-- jA- fjA i Блок 9 реализует операцию сравнения D. , где ОПОР const, и выработку бинарной команды (О или 1) в зависимости от результата сравнения, Блок 10 обеспечивает хранение коэффициентов а, а, Ъ ,132 и выдачу на свой выход либо коэффициентов а, либо 1 оэффициентов , в зависимости от кода (О или 1) бинарной команды из блока 9. Блок 11 (фиг. 2) реализует операцию (1) либо с коэффициентами а, Ъ, либо с коэффициентами а Значения 4 л / вычисленные в блоке 11, запоминаются в блоке 13 оперативной памяти В блоке 12 (фиг.2) реализуются операции (2) и (3) с величинами лУд,,лЧр, поступающими из блока 12, и величинами - ступающими из блока 3. Выход блока 12 (величины ) является выходом блока 8. С выхода блока 8 исправленные значения разностей фаз передаются в блок 4 устранения многозначности и вычислитель 6 поправки грубого от1счета. Соединенные в кольцо блоки 5 вычитания, вычислитель 6 поправки и сглаживающий фильтр 7 образуют следящую систему,-которая предназначена для измерения медленноменяющейся составляющей /оГ/разности oi ошибок грубого и точного отсчетов и для вычитания ее из грубого отсчета перед устранением многозначности точного отсчета. Исправленный в блоке 5 вычитания грубый отсчет t рр передается затем в блок 4 устранения многозначности и вычислитель 6 поправки В блоке 4 устранения многозначности по грубому и точному отсчетам вычисляются целое число периодов и временной интервал между сигналами ведущих и ведомой станций. Получение коэффициентов а , а , b,b2,Опор, используемых Р реализации выражения (1) в блоке 8, делается предварительно путем снятия экспериментальных данных. Устройство работает следующим образом. Сигналы станций (А, Б, В) радиона вигационной системы поступают на вход приемника 1. После селекции по астоте и усиления в нем указанные игналы передаются в блок 2 грубого блок 3 точного отсчетов. В блоке, 2 грубо измеряется временной интервал между сигналами ведомых (Б, В) и ведущей (А) станций, например, пу тем измерения временных интервалов ежду характерными точкс1ми огибаюих радиоимпульсов; в блоке 3 измеяются разности фаз высокочастотных аполнений этих же импульсов (вели ины А Последние поступают алее на вход блока В.. После посту ления первых замеров /5д ,7 на вход блока 8 они не корректируются,т.е.Ч О , fjAт fA 3 Б., В (выражение (3), фиг. 2) и устройство работает после получения первых замеров, без коррекции ошибок, точного отсчетаЛ д , Vg, вызванных разбалансом входных сигналов. Соответственно временные интервалы на ыходе устройства имеют ошибку,вызванную разба лансом входных сигналов; что вызывает соответствующую неточность и в определении координат местоположения объекта. Устройство для измерения временного интервала входит составной частью в приемоиндикатор радионавигационной системы, по которому определяют координаты объекта. При этом могут быть два способа преобразования измеренных временных интервалов в координаты объекта. В самом простейшем случае координаты объекта определяют по специальным картам, на которие нанесена сетка линии положений, соответствующий измеренным временным интервалам , . В дру гом случае для преобразования координат используют специальное устройство - преобразователь координат (ПК Таким образом, и я том и в другом случае, после первого измерения временных интервалов будут известны координаты объекта, по которым вручную или автоматически (в ПК) определяются дальности D , 05, DgOT объекта до передёиощих станций. При отсутствии ПК дальности будут сняты с тех же карт, тем более, что не требуется высокой степени точности в их оп ределении . Если ПК входит в состав приемоиндикатора, то дальности до передающих станций считаются там более точно, причем операция вычисл ния дальностей всегда выполняется как промежуточный результат при пересчете измеренных временных интервалов в координаты объекта. Полученнь1е по первому определению координат дальности (т.е. сор.тветст вукхцие нескорректированным значениям /g I Чрдс выходов блоков .3 и 8) вводятся в блок 8. В силу нескорректированности величин.: Чрд ,/пу,соответст вуюсцие им и введенные в блок 8 даль ности Пд, Dg, Dg также имеют погреш ности (правда, они малы по сравнению с величинами самих дальностей и составляют величины порядка десятков метров). На этом заканчивается 1-ый цикл итерационного уточнения временных интервалов и координат объекта.
Во 2-ом цикле на вход блока 8 поступают ненулевые (в отличие от 1-ого цикла) дальности Од, 05, Dg(результат 1-ого цикла, описанного Bbjme),,a 65
-PI
. акже новые результаты измерений величин /рд, выхода блока 3. При том, как следует из выражений (1)- (3), блок 8 корректирует величины бл вдследуквдим образом. Вначале работают блоки 9-И только для одной из станций, например ля станции А, реализуя выражение (1) для i А следующим образом. В зависимости от величины Од (результат 1-ого цикла) на выходе блока 9 вырабатывается команда О или 1, обеспечивающая выборку из постоянной памяти блока 10 |соэффициенты а,Ь или а2, bj соответственно; указанные коэффициенты поступс1ют на входы блока 11, где, согласно выражению (1), вычисляется величина д Чf. Эта величина с выхода блока 11 запоминается в блоке 13. Аналогичные циклJы работы блоков 9-11 выполняются далее для станции Б, а затем - для станции В. Соответственно, значения л ,4 цпоследовательно во времени передаются в блок 13, где также запоминаются в его оперативной памяти. После запоминания в блоке 13 величии дЧд,,лЧц начинается работа блока 12. Вначале он работает для линии положения АБ: из памяти блока , 13 выбираются величины , вычисляется, согласно выражению (2), величина , которая, в соответствии с выражением (3), вычитается далее из величины/ д; результат Vg.-j-(3) поступает с выхода блока 12 на выход блока 8. Затем в блоке 12 выполняется аналогичный цикл работы для линии положения АВ, в, результате чего ни выход блока 8 поступает величина вАТ. Уточненные во 2-ом цикле значения Чс. поступают с выхода блока 8 в Л I ОЛ J. вычислитель 6 поправки, который совместно с блоком 5 и фильтром 7 образует следящую систему. Эта следящая система обеспечивает сглаживание медленно меняющейся составляющей (5) разности oi ошибок грубого (trp) и точного ( Блтвдт отсчетов, полученных во 2-ом цикле уточнения временных интервалов. На выходе блока 5 вычитания формируется величина tfp-i учитывающая поправку oL TO , поступающую из фильтра 7 (здесь и ниже Т о величина периода высокочастотного заполнения радиоимпульсов). Величина передается в блок 4 устранения многозначности и вычислиталь б поправки. Блок 4 обеспечивает вычисление целого числа периодов И временного интервала между сигналами станций. JA()TO- j-B.B. Но, так как на него поступают скорректированные (на ошибки из-за разбаланса входных сигналов) величины дг, j Б, В, отличие от известного устройства, он формирует на выходе более точные значения величины временных интервалов t , ,B, По ним, как описано выше, определяют ся (или вычисляются в ПК приемоиндикатора) значения дальностей D,Dg,Dg более точные, чем это было в 1-ом цикле работы предлагаемого устройства и в известном. Указанные значения вновь подаются на вход блока 8. На этом заканчивается 2-ой цикл итерационного уточнения измеренных временных интервалов и, следовательно, координат объекта. Далее итерационный цикл продолжается, причем с каждым циклом происходит дальнейшее уточнение величин D, Dg, Dg,поступающих на вход бло1 а 8;соответственно уточняются поправки и Ч , (-2 , величины Ч на выходе блока 8 и, следовател но, результаты изменения временных интервалов tg, tgfl на выходе блока 4. Это, в свою очередь, приводит к уточнению координат объекта. Такое итерационное уточнение особенно эффективно при неподвижном объекте, т.е. при постоянных во времени истинных интервалах t./, tg, фазах Ошибка уточнения в этом случае ограничена сверху практически только инструментальными погрешностя ми аппаратуры. Данное устройство позволяет прогнозировать ошибку, вызванную разбалансом амплитуд с точностью н,е хуже О,003 МКС двумя кусочно-линейными функциями, аргументами которых явля ются дальности от объекта до передающих станций. таким образом, использование изобретения позволяет улучшить, по сравнению с известным устройством, то Ность измерения временных интервалов в различных точках рабочей зоны радионавигационных систем за счет компенсации ошибок, вызванных разбалансом сигналов. Формула изобретения 1.Устройство для измерения временных интервалов по авт. св. №530313, о тличающе е с я тем, что,, с целью повышения точности измерений, в него введен блок компенсации ошибок, первый вход которого подключен к выходу блока точного отсчета, второй вход соединен с шиной исходных данных, а выход - с вторыми входами вычислителя поправки и блока устранения многозначности. 2.Устройство по п. 1, о т л ичающееся тем, что, сцелью повыщения точности измерений, блок компенсации ошибок содержит последовательно соединенные блок сравнения и блок постоянной памяти, а также два арифметических блока и блок оперативной памяти, причем первый и второй выходы блока постоянной памяти, соединены соответственно с первым и вторым входами первого арифметического блока, третий вход которого соединен с одним из входов блока, сравнения и вторымвходом блока компенсации ошибок, а выход - с входом блока оперативной памяти, первый и второй выходы которого подключены соответственно к первому и второму входам второго арифметического блока, третий вход которого является первым входом блока компенсации ошибок, а выход - выходом блока компенсации ошибок. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 530313, кл. G 04 F 10/04, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временныхиНТЕРВАлОВ | 1979 |
|
SU817664A1 |
| Устройство для измерения временных интервалов | 1975 |
|
SU530313A1 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| Устройство для измерения временных интервалов | 1972 |
|
SU441545A1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2002 |
|
RU2272731C2 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения | 2017 |
|
RU2678371C2 |
| РАДИОНАВИГАЦИОННАЯ МНОГОПОЗИЦИОННАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ СИСТЕМА | 2020 |
|
RU2746218C1 |
ifejgl
S
.Of f/ffcnvu PA,,
Vjr, fMr
-,4r,-ai
г.1
.AffOO
o.m
0 Ю 7ffo ffffo т )
-0,12ff 3ffHff
10
Фuг.
-w
jf fiff, Ю
-ще
