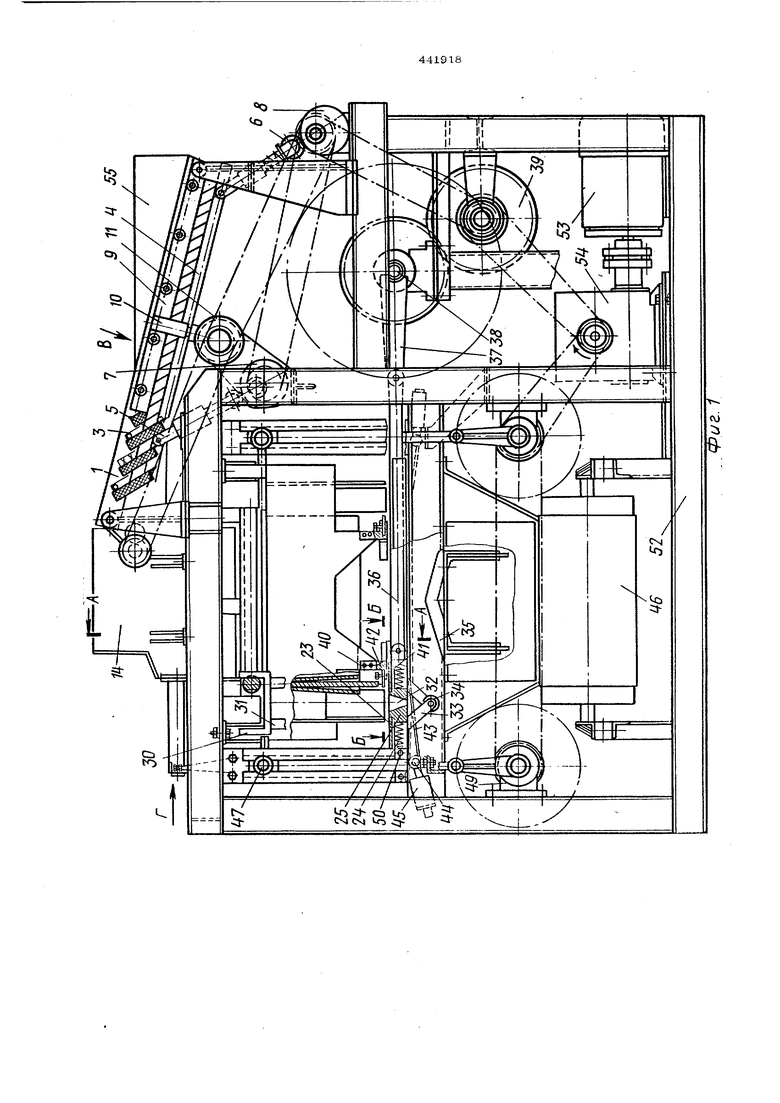
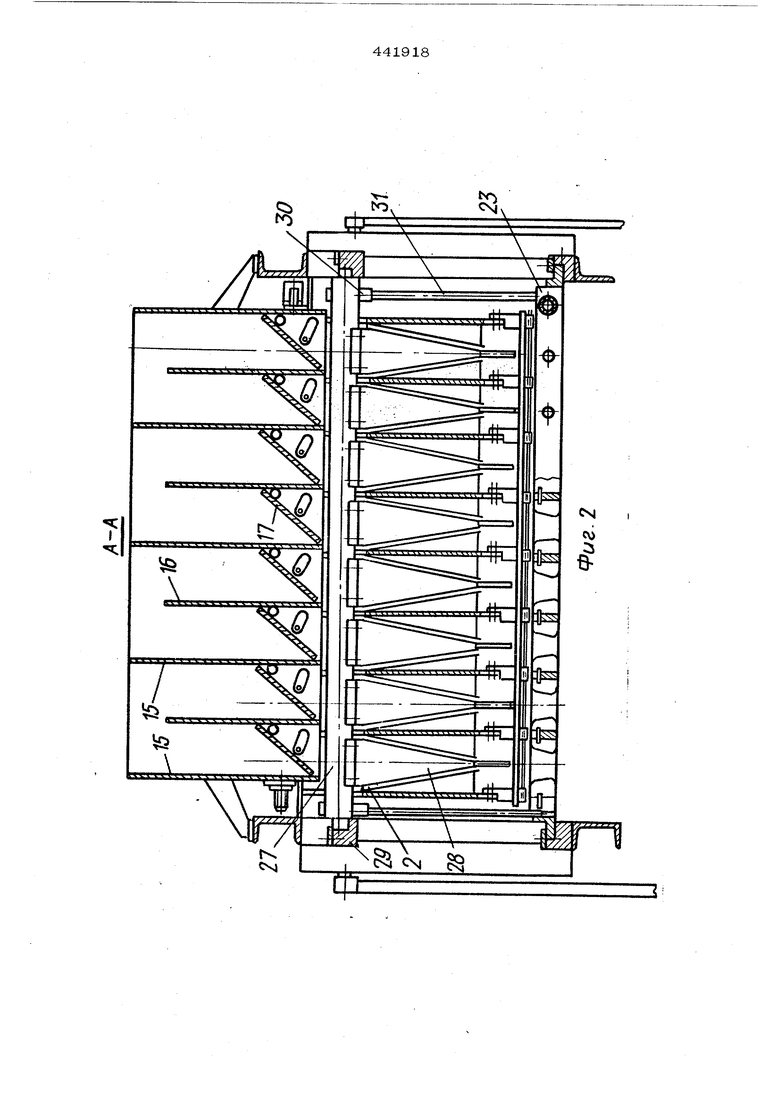
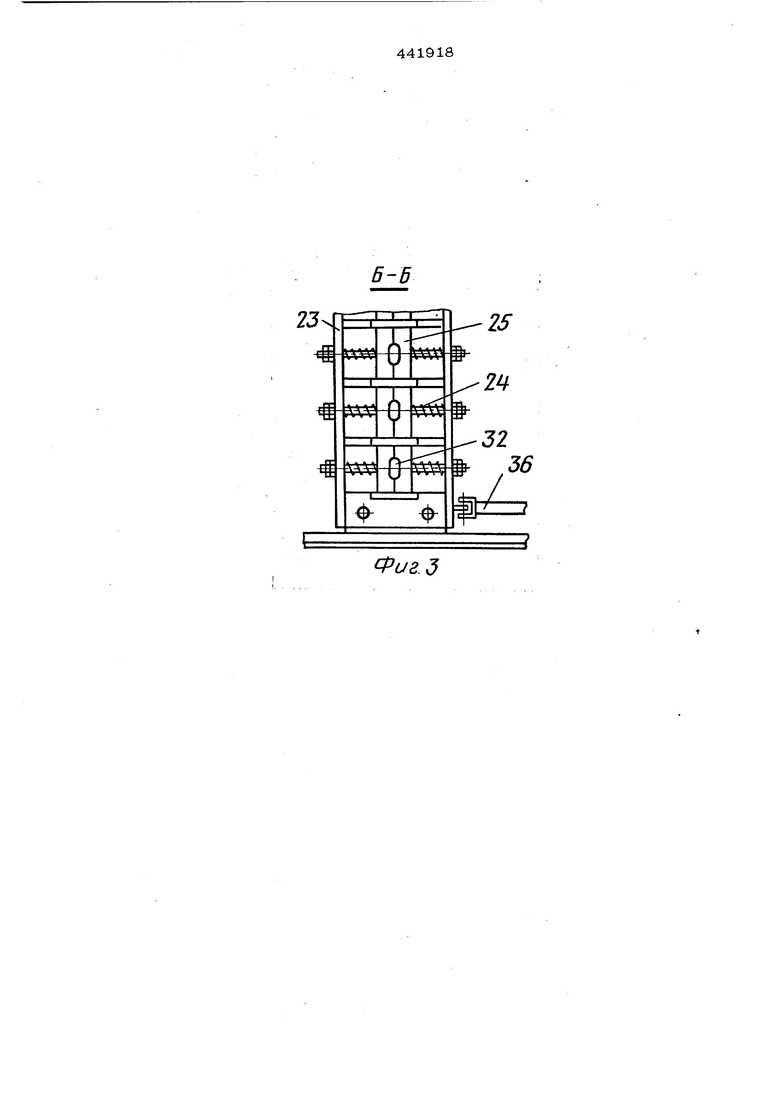
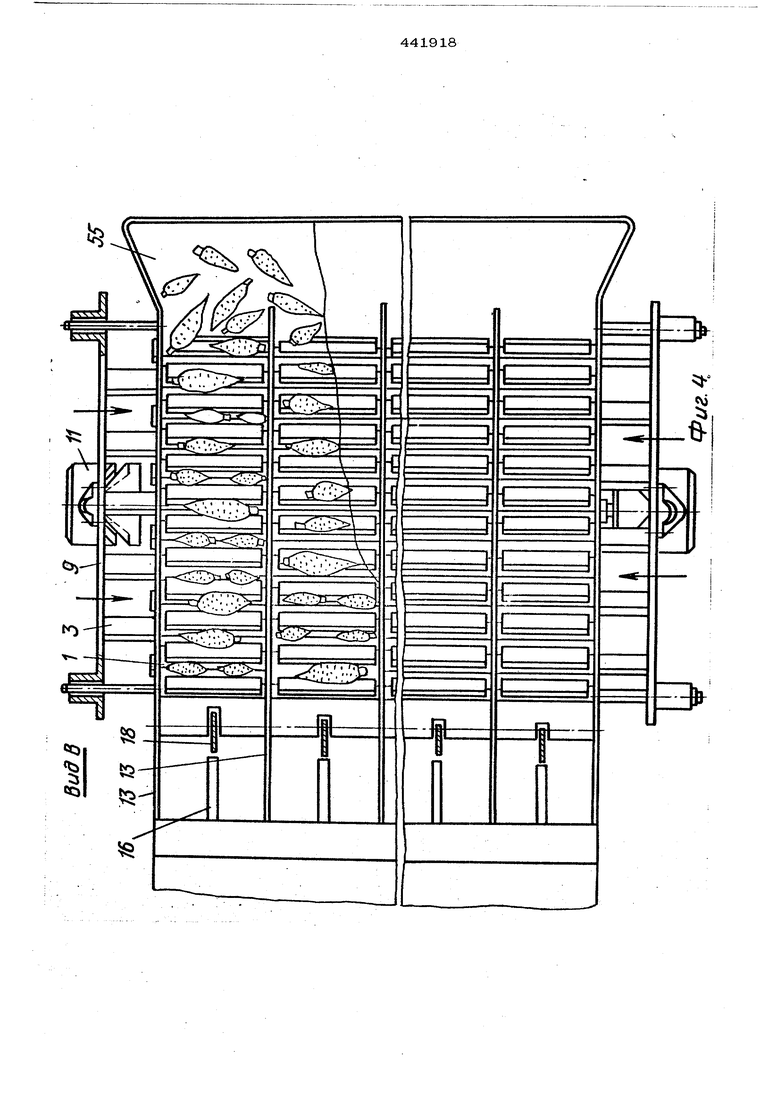
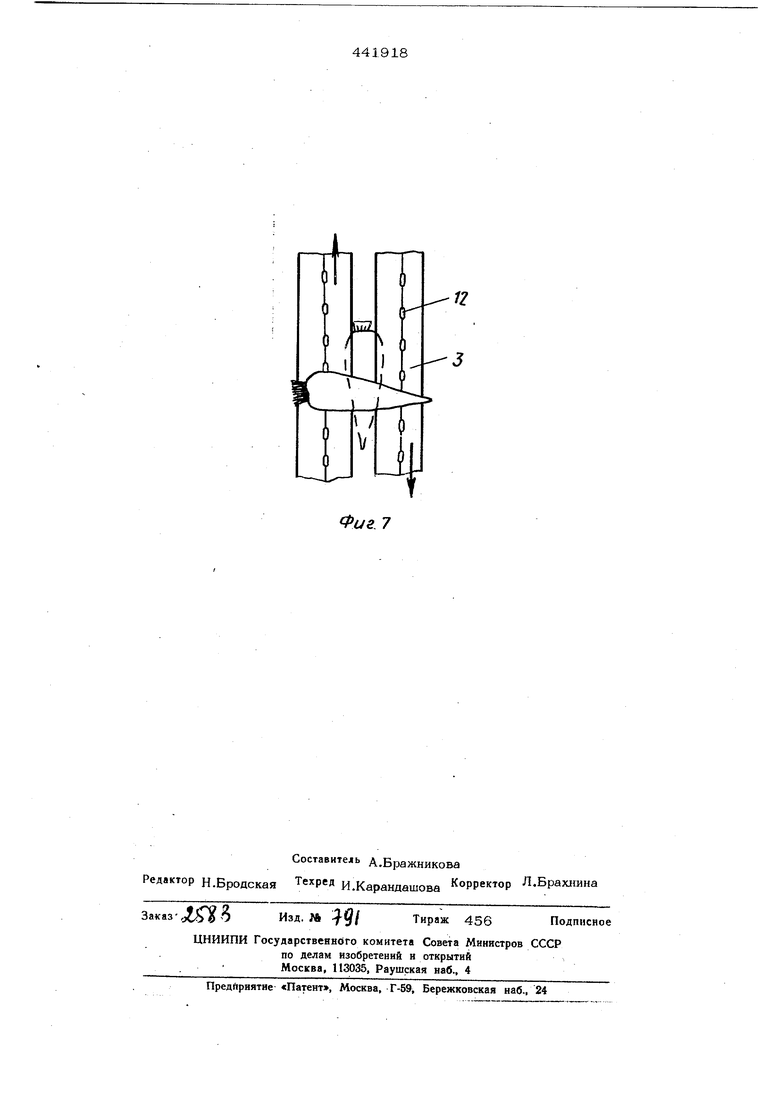
Изобретение относится к переработке овощей, а именно к автоматам для обрезки концов моркови, и может быть использовано в овошесушильной и консервной промышленности. Известен автомат для обрезки концов моркови, содержащий подающий транспортер, механизм поштучной подачи плодов и многокамерное устройство для ориент ации с расположе1П1ыми под ними носителем для плодов и режущим механизмом. Однако такой автомат сложен по конструкции, не обеспечивает обрезки плодов с минимальными отходами и не предотвращает механических повреждений несоориентир ванных и нестандартных плодов. При передаче с подающего транспортера в механизм поштучной подачи имеет место образование заторов плодов. Кроме того, известный автомат не обеспечивает высокой произво- дительности. Цель изобретения - упрощение конструк ции автомата и обрезка плодов с минималь ными отходами. Штя этого в предлагаемом автомате но- ситель установлен с возможностью возвратно-поступательного перемещения в горизонтальной плоскости и выполнен к виде попарно расположенных подпружиненных колодок. В камерах устройства для ориентации расположены толкатели для подачи плодов в колодки носителя, установленшле с возможностью возвратно-поступательного движения в вертикальной плоскскпи. Для Г1редотвра1 1ения механ гческлх повреждений несоориенЗнрованиых и нестандартных илодои толкателищарнирно зг1креплены на i rjiiifcfi оси и клждын лз них снабжен шариковым (vnjmjpoM. Механизм для поиц-учной подачи плодов выполнен в BJiдe камер, разметенных над устройством для ориентации и закрытых снизу игарнирнымн заслонкги.ш, Для исключения паторов плодов при передаче с подающего i-paHCnopieiJa в механизм лля поиггучной подачи плопов между ними установлены вращающиеся рифл1 нь5р диски. Для увеличения производитеп1)Н()Стп я втомат снабжен допсшнительным режущим механизмом, а внутри каждой камеры устройства для ориентации установлены лопасти, выполненные в виде пары V -образных пластин, жестко закрепленных на щтан- 5 ге, приводящейся в возвратно поступатель ное перемещение в горизонтальной плоскости. На фиг. 1 схематически изображен предлагаемый автомат, общий вид; на фиг 2 - разрез по А-А на фиг. 1; на фиг, 3 разрез по Б-Б на фиг. 1; на фиг. 4 - вид по стрелке В на фиг. 1; на фиг. 5 - вид по стрелке Г на фиг.. 1; на фиг. 6 - разрез по Д-Д на фиг. 5; на фиг. 7 - толкатели для йодачи плодов с подпружиненными стопорами устройства для ориентации. Автомат содержит подающий транспортер 1, механизм .щ учной подачи плодов, многокамерное уЬт зойство 2 для ориентации плодов и режуший механизм. Подающий транспортер 1 выполнен сту пенчатым и имеет Г-образные пластины 3 Ступеньки транспортера скреплены общей рамой 4, опирающейся через щтоки 5 с роликами 6 на кулачки 7 и 8. Г-образные пластины скреплены щеками 9, на которы закреплены водила 10 с роликами, переме щающимися в цилиндрических пазовых кулачках 11. Ступеньки установлены с возможностью возвратно-поступательного дви жения под углом к горизонтальной плоскости, а Г-образные пластины - в горизонтальной плоскости и имеют на своих ребрах полукруглые углубления 12. Ступенчатый транспортер по ширине разделен пластинами 13 на участки, равные длине наибольщего плода с учетом во можности его свободного перемещения. Последняя ступенька транспортера 1 примыкает к бункеру 14 механизма для пощтучной подачи плодов в горизонтальном положении, который выполнен в виде каме 15, разделенных перегородками 16, разме1денных над устройством для ориентации и закрытых снизу шарнирными заслонками 17. Для исключения заторов плодов при передачи с подающего транспортера 1 в механизм для пощтучной подачи ллодов между ними установлены вращающиеся ри(1шеные диски 18. Шарнирные заслонки соединены обшей тягой 19, которая кинематически связана с двуплечим рычагом 20. поворачивающим ся вокруг оси 21 и удерживаемым в заданном положении пружиной 22. Под многокамерным устройством 2 дл ориентации плодов установлен носитель 23 с возможностью возвратно-поступательно-
го перемещения в горизонтальной плоскости в виде попарно расположенных подпружиненных пружиной 24 колодок 25.
В камерах устройства 2 расположены толкатели 26 для подачи плодов в колод- ки 25 носителя. Камеры устройства 2 имеют в сечении клинообразную форму с углом, близким к наименьшей конусности плодов, Клинообразный участок на обоих концах заканчивается расширениями. Над камерами находится щтанга 27 с лопастями 28, которые выполнены в виде пары V -образных ластин по форме камер и входят в них. Штанга установлена в направляпощих 29 и с помощью скобы 30 и стоек 31 связана с носителем 23. Колодки 25 образуют отверстия 32 ллипсообразные в плане и конические в сечении, с окр;угленными кромками. Колодки « связаны ТЯГАМИ- S$: е-,роликом 34, который при движении носители б ажйвает ко пир 35. . Носитель 23 щарнирно соединен двумя щатунами 36 с кривошипами 37, находя- щимися на общем валу 38, который через шестерни 39 кинематически связан с промежуточным валом, приводящимся во вращение через храповую муфту (на чертежах не показана). Это обеспечивает остановку вала 38 через каждые пол--оборота (в I мертвых точках щатунно-кривошипного механизма ). Над носителем установлен режущий механизм для обрезки толстого конца плода, выполненный в виде закрепленных в державках 4О ножей 41. Под носителем размещен дополнительный режущий механизм 42 для обрезки тонкого конца, состоящий из двух пластин, консолр но закрепленных на качающемся рычаге 43 вокруг вала 44 с противовесом 45. Пластины образуют между собой щель, обеспечивающую свободный вход в нее тон... кого конца плода. Шель постепенно сужа- i ется по длине пластин и заканчивается поперечной режущей кромкой. В нижней части автомата установлен ленточный транспортер 46. Толкатели выполнены в виде пальцев, шар}1ирно связанных с общими осями 47. Каждый толкатель снабжен подпружиненным шариковым стопором 48. Оси приводятся посредством кривоишпов 49 и шатунов 50 в возвратно-поступательное движение, при этом концы пальцев толкателя 26 движутся по оси, проходящей через центр отверстия колодки 25 держатс ля.
На оси толкателей имеется упор 51, воздействующий в верхнем крайнем прлр. женин на плечо рычага 2О.
Все механизмы установлены на общей раме 52 и приводятся в движение от5
электродвигателя 53 через редуктор 54 , и систему депных передач.
Автомат работает следующим образом.
Плоды моркови после мойки подаются в бункер 55, разделяются пластинами 13 на ю несколько потоков, причем i на одном участке по длине помешаются один длинный или два коротких плода.
Под воздействием возвратно-поступательного движения Г-образных пластин 3с15 углублениями 12 в горизонтальной плоскости плоды заполняют свободное пространство между пластинами 13 и ориентируются по длине ступенек. В дальнейшем под воздействием возвратно-поступательного дви- 20 жения последних плоды последовательно перекатываются по ним, поднимаясь вверх на одну ступеньку за каждый оборот кулачков 7 и 8.
С последней ступени плоды сбрасывают- 25 ся в бункер 14 механизма поштучной подачи плодов в горизонтальном положении по обе стороны каждой перегородки 16, при этом при наличии на участке одного плода одна из камер остается свободной. 30 Вращающиеся рифленые диски 18 исключают возможность затора.
Когда ось 47 толкателей подходит в крайнее верхнее положение (фиг. 1)упором 51 поворачивается двуплечий рычаг 2О, 35 которым через тягу 19 открываются за- ; слонки 17, и плоды падают в камеры уст- ройства 2, ориентируясь при этом так, что тонкий конец их несколько опущен вниз.
В этот момент штанга 27 вместе с но- 40 сителем 23 находится вблизи крайнего йрложения. При этом штанга выталкивает из камеры плоды, поданные в предыдущем пикле, в расширенный участок последней, и плоды вниз, входя тонкими
концами в отверстия 32 носителя. Затем носитель 23 и штанга 27 останавливаются в крайнем положении, а ось 47 толкателей перемешается вниз, при этом плоды заталкиваются .пальцами толкателя 26 меж- SO ду колодками 25 до тех пор, пока над ними не остается срезанный участок. В это время колодки раздвигаются плодами на величину их диаметра и зажимают плоды с помощьюпружин 24.
Освободившийся от упора 51 двуплечий рычаг 2О возвращается под действием возвратной пружины 22 в исходное положение, а заслонки 17 закрываются.60
Передние тонкие концы плодов входят в щели дополнительного режущего механизма 42, поворачивая рычаг 43 вокруг вала 44 на угол, зависящий от длины плодов. Затем ось 47 толкателей движется вверх, а носитель 23, перемешаясь, приводит в движение штангу 27 через скобу 30,
закрепленную на стойках 31. При этом толстый конец плодов встречает нож 41 и срезается им, а тонкий конец, двигаясь в шеди режущего механизма 42, также срезается. Последний возвращается противовесом 45 в исходное положение.
Лопасти 28 штанги 27 захватывают плоды, находящиеся в камерах устройства 2 для ориентации, выпрямляют их до вертикального положения и в конце хода выталкивают в расширяющийся участок.
В середине хода ролик 34 и кдпир 35 поднимаются вверх, тяги 33 раздвиг-ают колодки 25, и обрезанные плоды падают на ленточный транспортер 46. При подходе к крайнему положению ролик 34 сходит с копира 35, и колодки возвращаются в исходное положение. При этом ступеньки подающего транспортера 1 совершают ход, и очередные плоды поступают в бункер 14 механизма пощтучной подачи. В крайнем положении носитель 23 и штанга 27 останавливаются, а плоды, вытолкнутые в расширенньй участок, попадают тонкими кон; цами в отверстия 32 носителя.
Ось 47 толкателей, достигнув верхнего положения, открывает заслонки 17, подава очередную партию плодов в камеры устройства 2 ориентации, и затем опускается
, вниз.
В дальнейшем цикл повторяется. Отходы после обрезки плодов выпадают на боковые участки транспортера 46 и поступают в сборник ( на чертежах не noKai зан).
В случае, если плод не заталкивается между колодок носителя, то усилие на толкатель 26 резко возрастает, в результате чего шарик стопора 48 выходит из гнезда, и толкатель, поворачиваясь на оси 47, прекращает свое воздействие на плод.
В дальнейшем толкатель 26 перемешается вверх, встречает упор и застопоривается, а плод после ухода носителя падает на транспортер 46.
Предмет изобретения
1. Автомат для обрезки концов моркови содержащий подающий тршнспортер, механизм поштучной подачи плодов и многокамерное устройство для юриентации с расположенным под ним носителем для плодов и режущим механизмом, отличающи с я тем, что, с целью упрощения конструк ции и обрезки плодов с минимальными отходами, носитель установлен с возможностью возвратно-поступательного перемещения в горизонтальной плоскости и выполне в виде попарно расположенньгх подпружинен ных колодок, при этом в камерах устройства для ориентации расположены толкатели для подачи плодов в колодки носителя, установленные с возможностью возвратно- поступательного движения в вертикальной плоскости, а механизм для поштучной подачи плодов выполнен в виде камер, размещенных над ориентирующим устройством .и закрытых снизу шарнирными заслонками. 2. Автомат по п. 1, отличающий с я тем, что, с целью предотв|ращения механических повреждений несоориентированных и нестандартных плодов, толкатели шарнирно закреплены на обшей оси и каждый из них снабжен подпружиненным шариковым стопором. 3.Автомат по п. 1, о т л и ч а ю- щ и и с я тем, что, с целью исключения заторов плодов при передаче с/подающего транспортера в механизм для поштучной подачи плодов, между указанными устройствами установлены врашаюишеся рифленые диски.-. . . . 4.Автомат по пг 1 и 2; отличающийся тём,чт6, с целью увеличения производительности, он снабжен дополнительным режущим механизмом, а внутри каждой камеры ориентирующего устройства установлены лопасти, выполненные в виде пары V -образных пластин, жестко установленных на штанге, приводя-« щейся в возвратно-поступательное перемещение в горизонтальной плоскости.
2J-25
-24 32
36
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для обрезки концов моркови | 1976 |
|
SU707567A1 |
| Машина для удаления семенника из перца | 1982 |
|
SU1156623A1 |
| Устройство для обрезки концов корнеплодов | 1985 |
|
SU1284497A1 |
| Автоматическая линия для изготовления гнутосварных дисков из пруткового материала | 1979 |
|
SU927465A1 |
| Устройство для подачи плоских предметов | 1978 |
|
SU749664A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УКУПОРКИ СТЕКЛОТАРЫ | 1968 |
|
SU220131A1 |
| ОПИСАНИЕ ИЗОБРЕТЕНИЯ | 1973 |
|
SU385829A1 |
| Поточная линия для изготовления и упаковки, например, школьных тетрадей | 1959 |
|
SU131359A1 |
| Устройство для поштучной подачи плодов | 1981 |
|
SU980677A1 |
| АВТОМАТ ДЛЯ СБОРКИ | 1992 |
|
RU2005586C1 |

Фиг.д
21
19
Фиг. 5 Д
В ид Г
.
,