1
Изобретение относится к автоматике. Устройство может быть использовано для обеспечения квазиоптимального по быстродействию режима управления (при ограниченной располагаемой скорости сервомотора) объектом, передаточная функция которого имеет вид:
(
где Ко5 - коэффициент усиления объекта;
Т - постоянная времени объекта.
При этом скорость сервомотора постоянна и динамика сервомотора определяется уравнением интегрирующего звена.
Известны устройства для автоматического управления, содержащие последовательно соединенные сумматор, релейный усилитель, серBOMOTOip и измеритель его выходной величины, а также измеритель и задатчик регулируемой величины, связанные со входами элемента сравнения, и дифференциатор, выход которого через выпрямитель подключен к первому входу блока умножения, второй вход которого соединен с измерителем выходной величины сервомотора, а выход - с первым входом сумматора.
Предлагаемое устройство отличается тем, что оно дополнительно содержит второй дифференциатор и второй сумматор, входы которого соединены с выходом элемента сравнения
непосредственно и через дифференциатор, первый выход второго сумматора связан со вторым входом первого сумматора, а второй выход - со входом первого дифференциатора.
Это позволяет обеспечить квазиоптимальное по быстродействию управление объектом, состоящим из инерционного и интегрирующего звеньев, независимо от вариаций коэффициента усиления объекта.
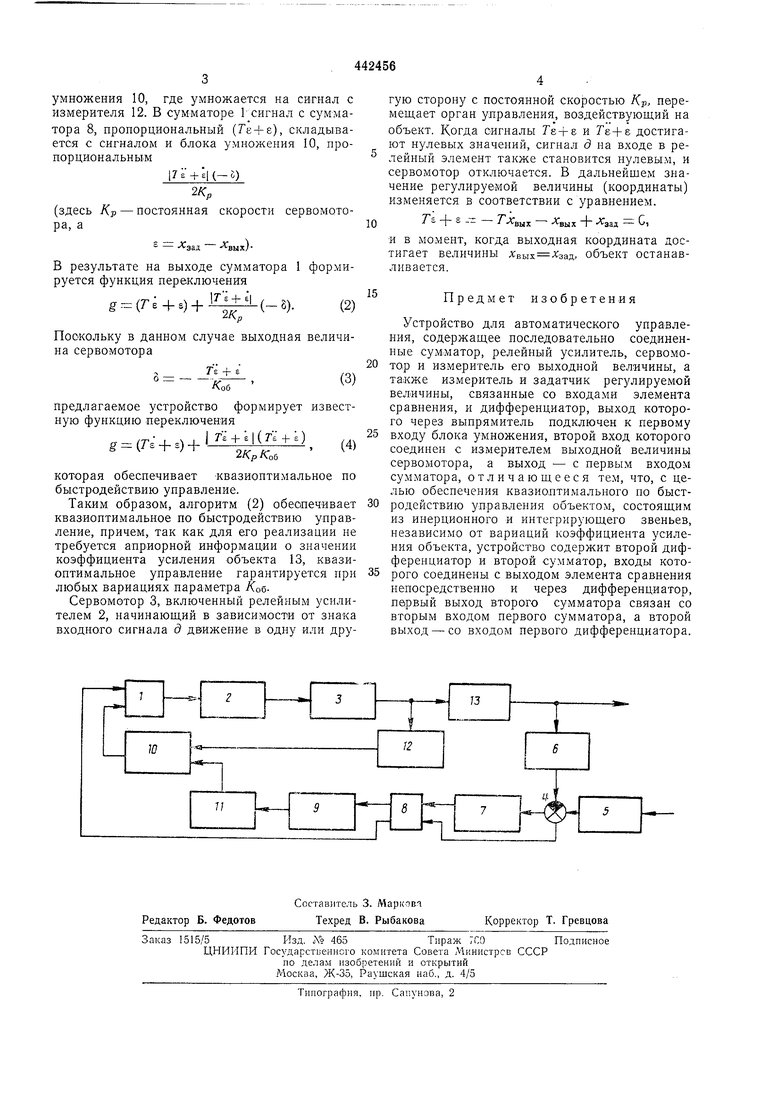
На чертеже изображена функциональная схема устройства.
Устройство содержит сумматор 4, релейный усилитель 2, сервомотор 3, элемент сравнения 4, задатчик выходной величины 5, измеритель выходной величины объекта 6, дифференциатор 7, сумматор 8, дифференциатор 9, блок умножения 10, выпрямитель 11, измеритель выходной величины сервомотора 12.
При подаче управляющего воздействия лзал задатчик 5 выдает на элемент сравнения 4 электрический сигнал, пропорциональный задающему воздействию. Этот сигнал сравнивается с сигналом с измерителя 6. С элемента сравнения сигнал ощибки (рассогласования) идет на один из входов сум :гтора 8 и через дифференциатор 7 - на второй вход сумматора. Со второго выходы сумматора сигнал, пропорциональный (&+Тг), через дифференциатор 9 и выпрямитель 11 подается на блок
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| Система автоматического управления инерционным объектом | 1977 |
|
SU962849A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU378799A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Система управления | 1977 |
|
SU741231A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
