(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| Система автоматического управления инерционным объектом | 1977 |
|
SU962849A1 |
| Устройство для автоматического управления | 1973 |
|
SU442456A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство для управления электроприводом робота | 1988 |
|
SU1553376A1 |
| Следящая система | 1978 |
|
SU746405A1 |
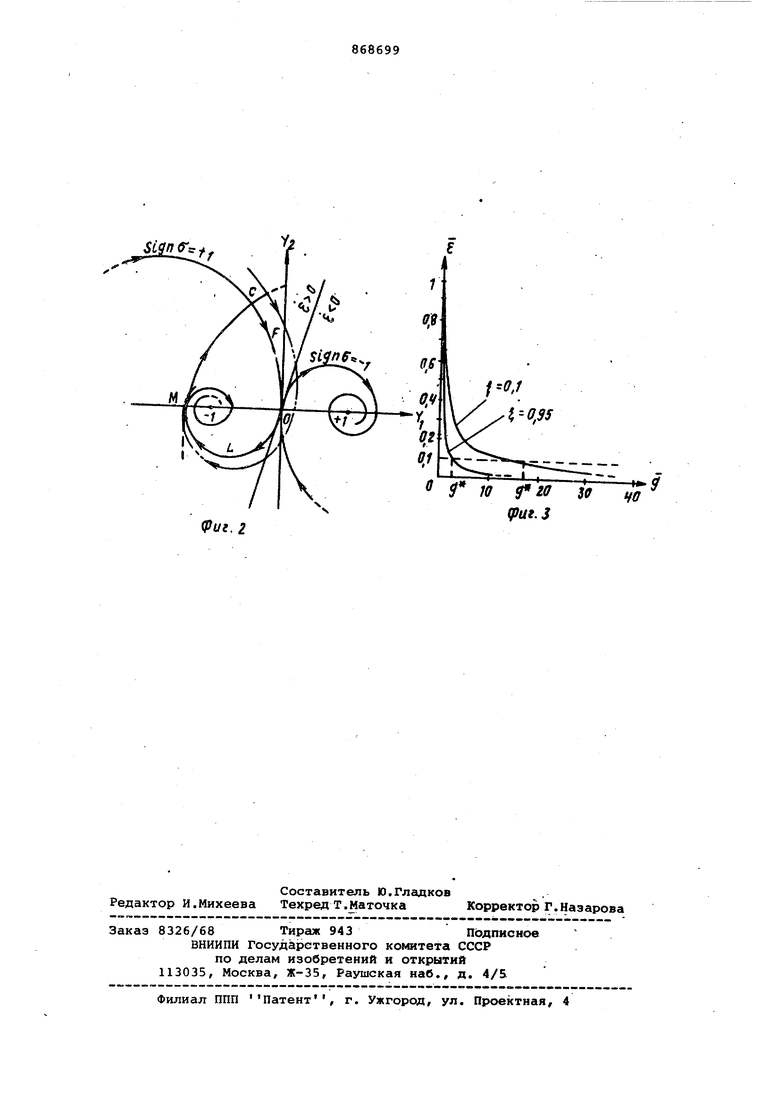
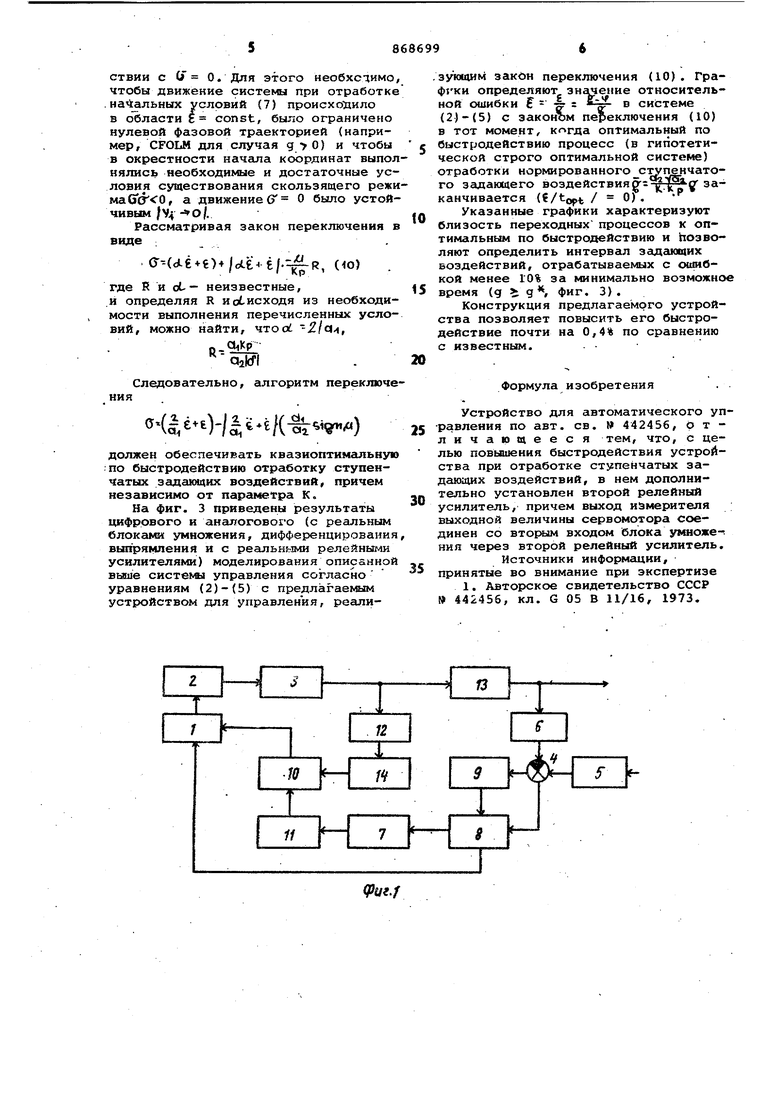
Изобретение относится к квазиоптимальному по быстродействию управлению колебательным линейным объектом второго порядка, уравнение которого имеет вид у + + КД, где у - регулируемая координата; Х входная соорди.натаг К - коэффициент передачи объекта Vij - собственная частота; /2-У - параметр затухания, с помощью сервомотора постоян ной скорости, может найти применение при управлении технологическими процессёми в цветной металлургии, при построении автопилотов пилотируеквлх и беспилотных летательных аппаратов и авторулевых надводных и подводных кораблей, судов на воздушной подушке По основному авт. св. 442456 из вестно устройство для автсжатического управления, содержащее последовательно соединенные первый сумматор, первый релейный усилитель, сервомотор и измеритель его выходной величины, а также измеритешь -и задатчйк регулируемой величины; связанные со входом элемента сравнения, первый .дифференциатор, выход которого через выпрямитель подключен к первому входу блока умножения, второй вход кото рого соединен с измерителем выходной тггличины сервомотора, а выход - с первым входом cyNwiaTopa, второй дифференциатор и второй сумматор, входы которого соединены с выходами элемента сравнения непосредственно и через дифференциатор, первый выход ьторого сумматора связан со вторым входом первого сумматора, а второй выход - со входом первого дифференциатора Недостатком известного устройства является его низкое быстродействие при отработке ступенчатых задающих воздействий. Цель изобретения - повышение быстродействия устройства при отработке ступенчатых задающих воздействий. поставленная цель достигается тем, что в устройстве дополнительно установлен второй релейный усилитель, причем выход измерителя выходной величины сервомотора соединен со вторым входом блока умножения через второй релейный усилитель. На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - фазовый портрет устройства; на фиг. 3 - результаты моделирования устройства. Устройство включает первый сумматор 1, первый релейный усилитель 2, сервомотор 3, элемент 4 сравнения задатчик 5 выходной величины объекта, измеритель 6 выходной величины объекта, первый дифференциатор 7, второй сумматор 8, второй дифференци атор 9, блок 10 умножения, выпрямитель 11, измеритель 12 выходной величины сервомотора,- объект 13 и второй релейный усилитель 14. На фиг. 2 и 3 обозначены у и Уо соответственно выходная величина объ кта 13 и ее первая производна.й; ё - значение относительной ошибки; g - нормированноеступенчатое задающее воздействие; функция переключёния; f,- производная сигнала ошибки устройства. Устройство работает следующим образом. При подаче ступенчатого задающего сигнала g задатчик 5 выходной величи ны объекта выдает на элемент 4 сравнения сигнал, который сравнивается с сигналом у, идущим с измерителя 6 выходной величины объекта. С выхода элемента сравнения сигнал ошибки (рассогласования) g - у подается на один из входов второго сумматора 8и на вход второго дифференциатора 9. С выхода второго дифференциатора 9сигнал первой Производной подается на второй вход второго сумматора 8, на выходе которого формируется сигналя пропорциональный f оС , подаваемый на первый вход первого сумматора 1 и на вход первого дифференциатора 7. С выхода первого дифферен циатора 7 сигнал обе Ё подается, на вход выпрямителя 11. Сигнал/о4. , с выхода выпрямителя 11 идет на первый вход блока 10 умножителя. На второй вход блока 10 умножителя приходит сигнал С sign/cc выхода второго релейного усилителя 14, на вход которо го подается сигнал с измерителя 12 выходной величины сервомотора. После перемножения сигналов в блоке 10 умножения .сигнал, пропорциональный li+d. sign, с выхода блока 10 умножения подается на второй вход первого сумматора 1, где и формируется закон управления .fc c/6+dL6/siJ И) В соответствии с законом управления (1) происходит переключение первого релейного усилителя 2, управляю щего движением сервомотора 3. Сервомотор 3 перемещает орган управления, воздействующий на объект, и обеспечивает приведение выходной величины .объекта 13 к заданному значению. Динамика системы автоматического управления, в составе которой работа ет предлагаемое устройство, описывается следующей системой ур рнений: уравнение объекта y+a y+a/jy K f (2) уравнение ошибки € д - у (3) уравнение привода Кр. signs (4) уравнение функции переключения (У - ( 6, i, t.,.) (5) , где у. - выходная величина объекта К - коэффициент передачи объекта 13; - выходная величина сервомотора 3; К- - коэффициент передачи привода (сервомотора 3 с первым релейным усилителем 2); g ступенчатое задаюиее воздей-. ствие. Выходная величина у; объекта и ее первая у и вторая у производные для указанной выше системы принимают значенияГ l K -f-fe)i м - с . 2 2ККр + ) Проекции фазовых траекторий описанной выше системы на плоскость у. , у представляют собой логарифмические спирали с фокусами, расположенными в точке (-1; 0) при sign С +i и в точке ( + 1; 0) при signs -1. При отработке устройством ступенчатых управляющих воздействий g эксивалентные начальные .условия в уравнениях (2)- (5) имеют вид to--bo; o g (7) и, соответственно, выходная величина объекта и ее производные равны wo; -- ||f-8-ce) Оптимальная по быстродействию отработка таких начальных условий происходит за три интервала управления .рпространстве монотонных процессов ё const и определяется условием --5igv4(v-,+ ) -sigvig-, 19) 1,де, , причем на последнем интервале движение к началу координат происходит по нулевоА фазовой траектории (фиг, 2, траектория CFO).. В случае близкого к оптимальному по быстродействию управления колебательным объектом движение должно происходить за два интервала управления и интервал скользящего движения, в течение которого координаты у прихо дят к 1асимптотически устойчивому положению равновесия О в соответствии с U 0. Для этого необходимо, чтобы движение системы при отработке . нэ альных условий (7) происходило в области const, было ограничено нулевой фазовой траекторией (например, CFOLM для случая g 0) и чтобы в окрестности начгша координат выпол нялись необходимые и достаточные условия существования скользящего режи ма СГ(, а движение 6 О было устойчивым |V4- О/. Рассматривая закон переключения в виде. C5--{ ie €) /., (0) . где R и oL - неизвестные, и определяя R и снисходя из необходимости выполнения перечисленных условий, можно найти, 4Tocii 2/а, n. Следовательно, алгоритм переключ ния 4l,e 0-/|i-i/() должен обеспечивать квазиоптимальну по быстродействию отработку ступенчатых задающих воздействий, причем независимо от параметра К. На фиг. 3 приведены результаты цифрового и аналогового (с реальным блоками умножения, дифференцировани выпрямления и с реальными релейныг ш усилителями) моделирования описанно выше систекял управления согласно уравнениям (2)-(5) с предлагаемым устройством для управления, реализующим закйн переключения (10) . Графики определяют значение относительной ошибки D системе (2)-(5) с законом переключения (10) в тот момент, оптимальный по быстродействию процесс (в гипотетической строго оптимальной системе) отработки нормированного ступенчатого задающего воздействия заканчивается (€/topt / 0) . Указанные графики характеризуют близость переходных процессов к оптимальным по быстродействию и Ьозволяют определить интервал задгиощих воздействий, отрабатываемых с ошибкой менее 10% за минимально возможное время (g g , фиг. 3). Конструкция предлагаемого устройства позволяет повысить его быстродействие почти на 0,4% по сравнению с известным. Формула изобретения . . Устройство для автоматического управления по авт. св. 442456, отличающееся тем, что, с целью повышения быстродействия устройства при отработке ступенчатых задающих воздействий, в нем дополнительно установлен второй релейный усилитель, причем выход измерителя выходной величины сервомотора соединен со sTOftiM входом блока умножения через второй релейный усилитель. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 442456, кл. G 05 В 11/16, 1973.
ui. i JO 10 30 HO (pat. 3
