1
Изобретение относится к области автоматики и может быть ислользовано для обеспечения олтимального по быстродействию режима управления нейтральным объектом, т. е. объектом, имеющим передаточную функцию
W,,(P) - , р
где Ко5 - коэффициент усиления объекта при
управляющих воздействиях типа скачка заданной величины.
;При этом скорость сервомотора постоянна и динамика его определяется уравнением интегрирующего звена.
Известные устройства для автоматического управления нейтральным объектом с сервомотором постоянной .скорости содержат элемент сравнения, входы которого связаны с задатчиком входной координаты и измерителем выходной координаты объекта, а выход непосредственно подключен ко входу дифференциатора и через последовательно соединенные сумм атор , релейный усилитель и сервомотор - ко входу объекта.
Однако при изменении коэффициента усиления объекта регулиров ания характер работы устройств нарущается, 1по,скольку реализованный алгоритм уже не обеспечивает оптимального режима управления.
Цель изобретения - обеспечение минимального времени регулирования объекта при ограниченной скорости сервомотора незав исимо от вариаций коэффициента усиления объекта.
Для этого в устройстве дополнительно уста новлены мостиковый выпрямитель и потенциометр обратной связи со средним выводом. Крайние выводы лотенциометра обратной связи подсоединены через мостиковый выпрямитель к выходу дифференциатора, и средний вывод - ко входу сумматора. Двил ок потенциометра механически связан с выходным штоком сервомотора.
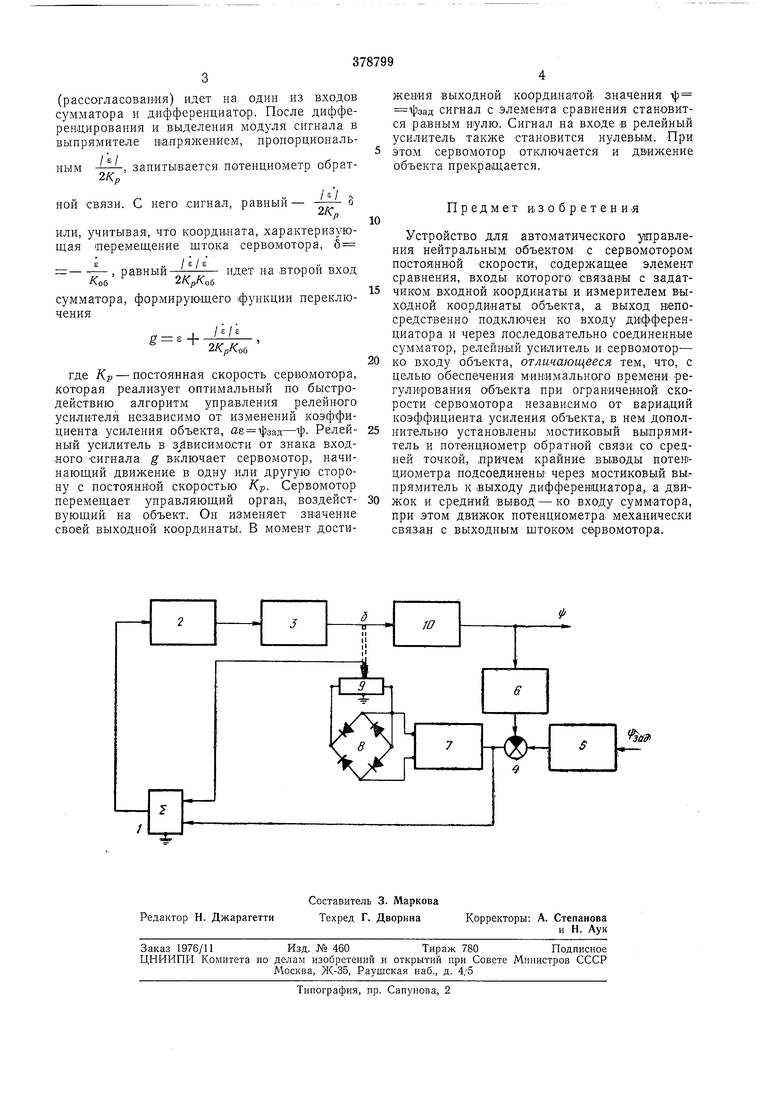
|На чертеже изображена функциональная схема устройства.
Оно содержит сумматор /, релейный усилитель 2, сервомотор 3, элемент сравнения 4, задатчик входной координаты 5, измеритель выходной координаты объекта 6, дифференциатор 7, мостиковый выпрямитель 8, потенциометр обратной связи 9, нейтральный объект 10.
При подаче управляющего воздействия ±Фзад задатчик входной координаты выдает на элемент сравн1ения электрический сигнал, пролорциональный задающему воздействию. Этот сигнал сравнивается с сигналом, идущим с измерителя выходной координаты объекта. С выхода элемента сравнения сигнал ошибки
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Устройство для автоматического управления | 1973 |
|
SU442456A1 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Система автоматического управления инерционным объектом | 1977 |
|
SU962849A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Автоматический регулятор дистанционного действия | 1955 |
|
SU122623A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
