Изобретение относится к области автоматики и может быть использовано для обеспечения оптимального по быстродействию режима управления (т. е. минимального времени управления при ограниченной располагаемой скорости сервомотора) объектом, передаточная функция которого имеет вид
об(/) ,
р Г
где: /Соб - коэффициент усиления объекта, Т - постоянная времени объекта.
Скорость сервомотора постоянна, и динамика сервомотора определяется уравнением интегрирующего звена.
Известные устройства для автоматического управления содержат соединенные последовательно сумматор, релейный усилитель, сервомотор и измеритель выходной величины сервомотора, а также измеритель и задатчик регулируемой .величины, выходы которых присоедипены ко входам элемента сравнения, выход которого связан с первым входом сумматора и через последовательно соединенные дифференциатор и выпрямитель - с первым входом первого блока умножения, второй вход которого подключен к измерителю выходной величины сервомотора, а выход - ко второму блоку умножения, соединенному с нелинейным преобразователем, и выход которого связан со вторым входом сумматора.
Предлагаемое устройство отличается тем, что оно дополнительно содержит второй выпрямитель, вход которого соединен с выходом измерителя выходной величины сервомотора, а выход подключен ко входу нелинейного преобразователя. Это позволяет обеспечить минимальное время регулирования инерционным объектом первого порядка при вариациях его коэффициента усиления.
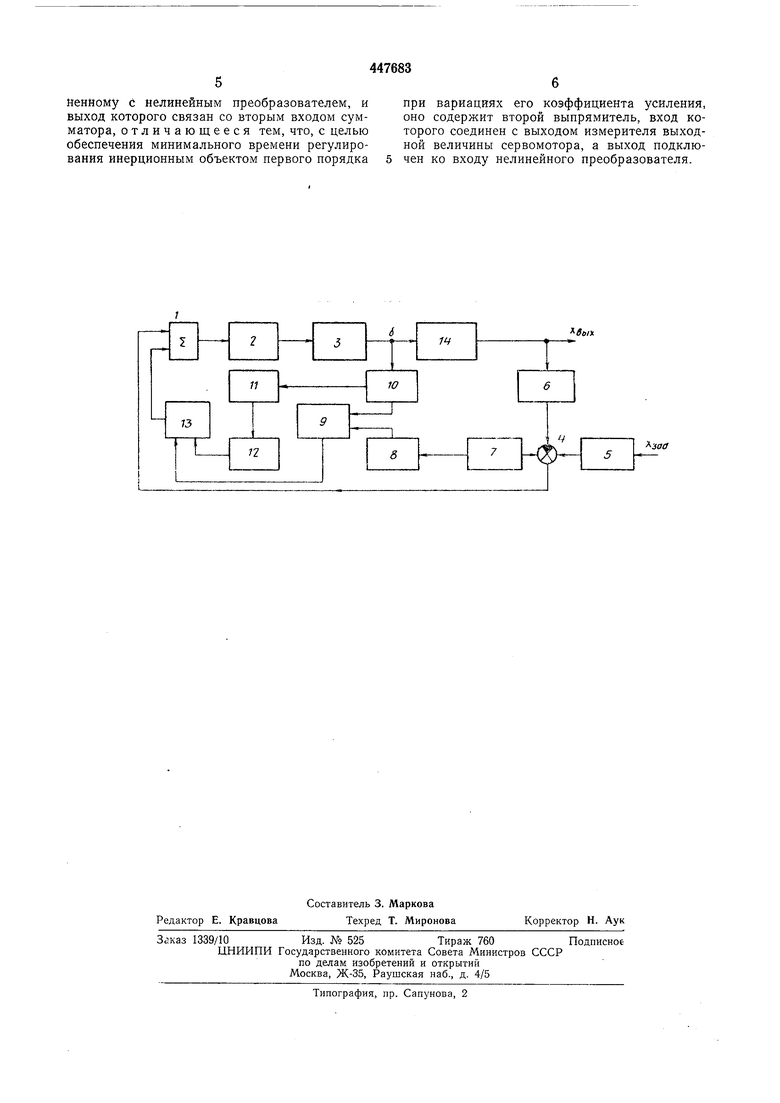
На чертеже приведена функциональная схема устройства. Оно содержит сумматор 1, релейный усилитель 2, сервомотор 3, элемент 4 сравнения, задатчик 5 выходной величины, измеритель 6 выходной величины объекта, дифференциатор 7, выпрямитель 8, блок 9 умножения, измеритель 10 выходной величины сервомотора, выпрямитель 11, нелинейный преобразователь 12, блок 13 умножения и инерционный объект 14 первого порядка.
При подаче управляющего воздействия дгзад, задатчик 5 выдает на элемент 4 сравнения
электрический сигнал, пропорциональный задающему воздействию. Этот сигнал сравнивается с сигналом, идущим с измерителя 6. С выхода измерителя сравнения сигнал ошибки идет на один из входов сумматора 1 и на дифференциатор 7. После дифференцирования, выделения модуля сигнала в выпрямителе 8 и перемножения с сигналом, идущим с измерителя 10, в блоке 9 умножения сигнал, пропорЙ-1б1
подается на один из
циональныи
2/С„
входов блока 13 умножения. На второй вход блока умножения подводится сигнал, проходящий с выхода измерителя 10 через выпрямитель 11 и нелинейный преобразователь 12 и пропорциональный значению функции
Fil1).После перемножения сигна КрТ)
лов, пропорциональных
в блоке умножения 13 произведение этих сигналов идет на второй вход сумматора 1, формирующего функцию переключения
I е I ( 8) +orl-(1)
АГрУ
где /Ср - постоянная скорость сервомотора, а
в Поскольку в данном случае выходная величина сервомотора
Т& + f.- Хза
(2) Коб
и уравнение фазовой траектории на первом интервале управления определяются известным выражением
в -- - Ге + Д-об/СрГ. sign glnX
xfl + zA-Sign W- aaxgi о- о I 1 --ДИМ(о)
чAofiAp/
а также учитывая, что на первом интервале signg - sign(з//СобЛр) E - signs. (4) выражений из (2), (3) и (4) следует, что
f -K,T(signg)ln(l + signg
АобАр
-/Cpr{signe)//z(,
T. e.
- (- sign g) In
j
или
+ 1
/СпГ
КобКп
Характеристика нелинейного преобразоватеFii-- определяется выражением
Кг,Т
КрТ
(5)
Подставив выражения для «F и «б в выражение алгоритма переключения (1), получим, 20 что функция переключения
- o5/Cpr(signs)te(l,+ 1)
+ rs с точностью до постоянного множителя КобКуТ
совпадает с известной оптимальной (в смысле времени) функцией переключения.
Таким образом, алгоритм (1) обеспечивает оптимальное по быстродействию управление. Причем, так как для его реализации не требуется априорной информации о значении коэффициента усиления объекта Коб, оптимальное управление гарантируется при любых вариациях параметра обРелейный усилитель 2, в зависимости от
знака входного сигнала g, включает сервомотор 3, начинающий движение в одну или другую сторону с постоянной скоростью /Ср. Сервомотор перемещает орган управления, воздействующий на объект. Объект управления
изменяет значение своей выходной (регулируемой) координаты. В момент достижения регулируемой координатой значения х Хзад сигнал с элемента сравнения становится равным нулю. Сигнал на входе в релейный усилитель также становится нулевым. При этом сервомотор отключается и движение объекта прекращается.
Предмет изобретения
Устройство для оптимального по быстродействию управления, содержащее соединенные последовательно сумматор, релейный усилитель, сервомотор и измеритель выходной величины сервомотора, а также измеритель и задатчик регулируемой величины, выходы которых подсоединены ко входам элемента сравнения, выход которого связан с первым
входом сумматора и через последовательно соединенные дифференциатор и выпрямитель - с первым входом первого блока умножения, второй вход которого подключен к измерителю выходной величины сервомотора, а
выход - ко второму блоку умножения, соедийенному с нелинейным преобразователем, и выход которого связан со вторым входом сумматора, отличающееся тем, что, с целью обеспечения минимального времени регулирования инерционным объектом первого порядка
при вариациях его коэффициента усиления, оно содержит второй выпрямитель, вход которого соединен с выходом измерителя выходной величины сервомотора, а выход подключей ко входу нелинейного преобразователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Система автоматического управления инерционным объектом | 1977 |
|
SU962849A1 |
| Устройство для автоматического управления | 1973 |
|
SU442456A1 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Устройство для управления электроприводом робота | 1988 |
|
SU1553376A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU378799A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Следящая система | 1978 |
|
SU746405A1 |