(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU442457A1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство для автоматического управления | 1973 |
|
SU442456A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
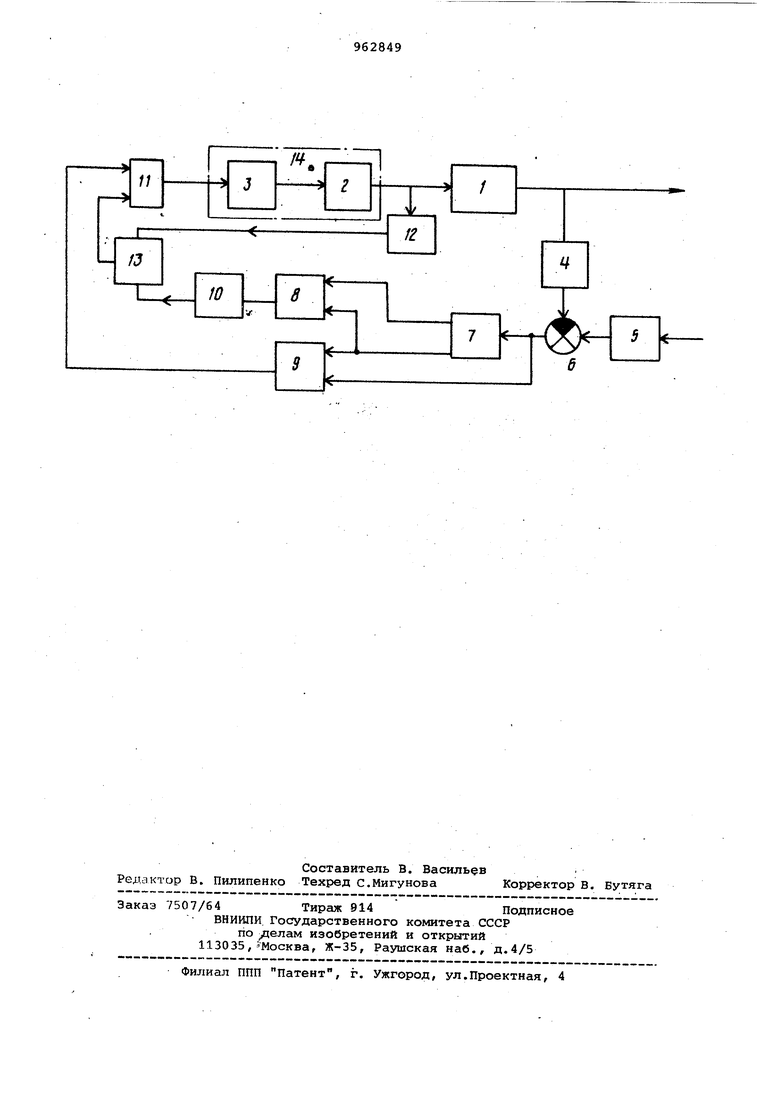
Изобретение относится к автоматике и может быть использовано для обе печения квазиоптимального по быстродействию управления инерционным объектом второго порядка, передаточная функция которого .имеет вид ) r4p+o(Vp+TT где К - коэффициент усиления объекта; Ти , (,,-постоянные времени объекта , с помощью сервомотора постоянной скорости, в частности при управлении технологическими процессами, при управлении движущимися объектами Известны системы автоматического управления, обеспечивающие оптимальное (или квазиоптимальное} по быстро действию управление и содержащие сер вомотор постоянной скорости и нелинейный преобразователь. В этих системах в функции от ошиб ки и ее производных формируют нелинейную функцию переключения, вид которой определяется динамикой объекта ПЗ. Недостатком данных систем является необходимость знать все парамет ры передаточной функции и вводить их з начения в вычислительное устройство. Наиболее близким по технической сущности к предлагаемому является система автоматического управления, содержащая нелинейный преобразовательу сервомотор постоянной скорости, измеритель регулируемой координаты, выход которого и выход задатчика подключены к соответствующим входам элемента сравнения, выход которого подключен ко входу блока формирования производных и к первому входу первого усилителя, второй вход которого присоединен к первому входу второго усилителя и к одному из выходов блока формирования производных, выход - к первому входу сумматора, вы ход которого подключен ко входу .сервомотора постоянной скорости, второй вход второго усилителя/Подсоединен , к другому выходу блока формирования производных. Известная система обеспечивает квазиоптимальное по быстродействию управление при реализации закона переключения, предложенного Силва: (V)J, (2 ) , (2а) РИ) (-sicjnV)-Qn(l+(V/j+V, т. е. - Sicfn 6f 9lqjn (Е + )+ TI (), - ККрТ; (sicgn Cn (-f+/V). Ha выходе элемента сравнения форм руется сигнал ошибки между задающим сигналом и сигналом регулируемой ко динаты E-q- . При этом параметры объекта управления K . Т и привода .; Т должны быть извест нн и используются для формирования сигналов и и V. На нелинейном преобразователе получается нелинейная составляющая квазиоптима льного закона управления, а на выходе сумматора полный закон управления(i.В зависимости от знака функции б серв мотор постоянной скорости (который составляют релейный усилитель и сер вомотор) вызывает перемещение исполнительного органа управления /л.. Воздействие на объект управления ис полнительного органа /UL. вызывает изменение регулируемой .координаты f, которая за близкое к оптимальному ffo быстродействию время переходит от начального значения Ч к заданному значению t2 . Однако известные системы имеют тот недостаток, что при изменении постоянной времени объекта, наприме Ttf (которое происходит в связи с изменением режимов работы объекта) либо при отсутствии априорной информации о значении этого параметра нельзя реализовать функцию переключения (2 ), а следовательно, и квазиоптимальное по быстродействию протекание процессов. Цель изобретения - увеличение быстродействия системы при изменениях постоянной времени инерционно объекта. , Поставленная цель достигается тем,- что система содержит блок умно жения и .измеритель выходной координ ты (ервомотора постоянной скорости которого подключен к одному из входов блока умножения, другой вход которого через нелинейный пре образователь связан с выходом второ го усилителя, а выход - с вторым в дом сумматора.. На чертеже представлена -блок-схе ма системы автоматического управления инерционным объектом. , Схема содержит.объект 1 управле ния, описываемый передаточной функ цией (1), сервомотор 2, релейный усилитель 3, измеритель 4 регулируемой координаты, задатчик 5, элемент 6 сравнения, блок 7 формирования производных (дифференцирующие блоки либо измерители производных сигнала, в зависимости от вида регулируемого параметра объекта), усилители 8 и 9 (например, магнитные усилители, операционные усилители), нелинейный преобразователь 10, сумматор 11, измеритель выходной координаты сервомотора постоянной сА)рости 12. (например, потенциометр обратной связи сервомотора, блок 13 умножения, сервомотор 14 постоянной скорости. I Система работает следующим обра- При подаче задающего воздействия д цдзадатчик (регулируемой координаты) 5 выдает на элемент б сравнения сигнал, который сравнивается с сигналом V идущим с измерителя регулируемой координаты. С выхода элемента сравнения сигнал ошибки (рассогласования) Е -fl joiA подается на один из входов усилителя 9 и на вход блока формирования производных 7. С его выхода сигнал первой производной подается на второй вход усилителя 9, на выходе которого формируется сигнал, пропорциональный + Е, подаваемый на сумматор 11. На вход усилителя 8 с выхода блока формирования производных подартся сигналы, пропорциональные Ё и Е . На выходе усилителя 8 формируется сигнал, пропорциональный T. + E . который подается на вход нелинейного преобразователя, пропорционален нелинейной функции от координаты V ККрперемножения в блоке 13 умножения сигналов с нелинейного преобразователя 10 и с измерителя выходной координаты сервомотора 12 произведение этих сигналов идет на второй вход сумматора 11, формирующего функцию переключения Sic5n () Поскольку в данном случае уравнение объекта имеет вид ,V+(.) К, С) а уравнение сервомотора 14 постоянной скорости уй К i gn б , то при ступенчатом задающем воздействии g(t) дзад1{1), выходная координата сервомотора 2 определяется выражением Tc,() .(t,.,. , ()крт. (6) / Заметим также, что уравнение нулевой фазовой траектории (уравнение второго интервала управления) , имеет вид (signV)ln() О, а уравнение первого интервала управ ления определяется из условия прохо дения фазовой траектории через точ-ку ненулевых начальных условий Ug и V, соответствующих ступенчатому задающему воздействию (sign(V)ln()C (7) Поскольку начальные условия то при 9заА ) 93cv (t) ; ;ЕО дзе,д- , FB (см.ф-лу(2а)) ,.и (5ignV)ln() а уравнение траектории первого инте вала (см. (7)) принимает вид и (s i gn (V ) ) 1 п ( 1-/V V) + f ( Представив {Q) в (б), получим -yu.(t)-KpTif(signV)ln() (9 Сравнивая сформированный закон переключения 6 (см.(3)) с учетом (9) и предложенный Силва квазиоптимальный закон (см. (2б)) ...определи характеристику нелинейного преобразователя F (см.(3)) из условия сов падения законов Tt()-KKpT ()er(f o.5K -KpTi()en() Разделив числитель и знаменатель на положенное число ККрТц), получим окончательно характеристику нелинейного преобразования pfJii iU у).-/v/-en(..) (, Л «Кр / 0,5En(l-/V«/) 496 Закон переключения (3) с характеристикой F , определяемой выражением (10), тождествен известному квазиоптимальному закону (2), однако при формировании закона пе{1еключения (3) не требуется априорная информация о значении постоянной времени (Тц). Следовательно, предлагаемая система обеспечит квазиоптимальную отработку ступенчатых задающих воздействий независимо от вариаций постоянной времени объекта, т.е. повысит быстродействие. Формула изобретения Система автоматического управления инерционным объектом, содержащая нелинейный преобразователь, сервомотор постоянной скорости, измеритель регулируемой координаты, выход которого и выход задатчика подключены к соответствующим входам элемента сравнения, выход которого подключен ко входу блока формирования производных и к первому входу первого усилителя, второй вход которого присоединен к первому входу второго усилителя и к одному из выходов блока формирования производных, выход - к первому входу сумматора, выход которого подключен ко входу сервомотора постоянной скорости, второй вход второго усилителя подсоединен к другому выходу блока формирования производных, отличающаяся тем, что, с цеЛью увеличения быстродействия система при изменениях постоянной времени инерционного объекта, она содержит блок умножения и измеритель выходной координаты сервомотора постоянной скорости, выход которого подключен к одному из входов блока умножения, другой вход которого через нелинейный преобразователь связан с выходом второго усилителя, а выход - с вторым входом сумматора. Источники информации, принятые во внимание при экспертизе 1. Фельдбаум А.А. Основы теории оптимальных автоматических систем. М., Наука, 1966, с. 167, рис. ЗЛО. 2. Павлов А.А. Синтез релейных систем, оптимальных по быстродействию. М., Наука, 1966, с. 297, рис. 7.1.
8
W
