До сего времени существуют два основных типа станков для шлифования линз с поверхностями вращения, образованными кривыми второго порядка. В одном из типов работа производится по копиру, а в другом линза вращается вокруг неподвижной оси, а шлифовальный круг под действием соответствующего кулисного механизма движется по заданной кривой. Основной недостаток первого типа состоит в том, что для каждой параболической поверхности нужен свой отдельный копир, который очень дорог, в виду больших требований, предъявляемых к точности его изготовления, так как от точности изготовления копира зависит и точность изготовления детали. Кроме того имеется налицо трудность установки. Малейший перекос копира делает никуда не годной изготовляемую деталь.
Недостатком второго типа является относительная сложность кулисного механизма, наличие довольно большого числа подвижных частей и как результат этого - неточность движения круга по заданной кривой. Кроме того в большинстве случаев один и тот же кулисный механизм не может дать движения по эллипсу, параболе и дуге круга, что, однако, достигается настоящим станком при исключительной простоте приводных механизмов. Наконец, очень важным преимуществом данного станка является возможность получения совершенно точных сферических поверхностей малой кривизны. До сего времени имеются лишь приборы, дающие приближенно правильные такие поверхности.
На новом станке для получения различных параболических, эллиптических и сферических поверхностей достаточно только изменить расстояния между центрами вращения дисков и пальцами, передающими движения от дисков к кулисам. Диаметр обрабатывающего инструмента никакого влияния на обрабатываемую поверхность не имеет и может быть взят любым.
Как видно из схематического чертежа, вращающийся диск 5 имеет прорез, в котором на различных расстояниях от центра закрепляется палец 4, передающий через кулису 3 движение шпинделю 1 с обрабатывающим инструментом. Шпиндель 1 имеет только это горизонтальное движение в направляющих.
Подобным же образом вращающийся диск 10 имеет прорез, в котором на различных расстояниях от центра закрепляется палец 9, передающий через кулису 8 движение шпинделю 6 с изделием. Шпиндель с изделием перемещается в направляющих 7.
При вращении диска 5 закрепленный в нем палец 4 будет давить на кулису 3, а так как она скреплена со шпинделем, который может перемещаться в горизонтальном направлении, то он под действием кулисы начнет перемещаться взад и вперед в направляющих 2.
В то же время палец 9, закрепленный на вращающемся диске 10, будет давить на кулису 8; так как эта кулиса связана со шпинделем 6, а этот шпиндель может перемещаться в своих направляющих 7, то он и будет двигаться в этих направляющих вверх и вниз.
Для получения параболических поверхностей диск 10 должен делать вдвое больше оборотов, чем диск 5 и следовательно за время поворота диска 5 на угол α диск 10 повернется на угол 2α.
Для получения эллиптических и сферических поверхностей диски 5 и 10 должны иметь одинаковые вращательные движения, но не полные, а качательные.
Доказать эти положения не представляет труда. Начнем со случая обработки параболической поверхности.
Если диск 5 повернется на угол α, то вал с кругом переместится на величину, равную проекции a (где a - расстояние пальца 4 от центра вращения диска 5) на ось х-ов. Следовательно уравнение движения камня будет

В то же самое время диск 10 повернется на угол 2α и шпиндель с изделием переместится на величину, равную проекции b радиуса вращения пальца 9 на ось у-ов.
Следовательно уравнение движения будет
Мы получили два уравнения движения. Решаем их совместно. Подставляем во второе уравнение вместо cos2α значение sinα из (1)

так как

то
или
Мы получили параболу, ограниченную ординатой =2b и абсциссой =а; вершина этой параболы обращена кверху.
Пример обработки линзы с параболической поверхностью. Требуется обработать линзу диаметром 50 мм; поверхность этой линзы выражена уравнением
Так как диаметр линзы =2х = 2а, то а=х=25.
Находим ординату =2b, подставляя вместо х - 25,

b=7,81 мм
Для получения этой поверхности нужно:
1) установить палец на диске 5 на расстоянии 25 мм от центра вращения этого диска и
2) установить палец на диске 10, на расстоянии 7,81 мм от центра вращения этого диска.
При эллиптической поверхности рассуждаем аналогичным образом.
Если диск 5 повернется на угол α, то шпиндель 1 с кругом переместится на величину, равную проекции a на ось x; следовательно уравнение движения вала с камнем будет

Диск 10 повернется за это время также на угол α и шпиндель переместится на величину, равную проекции b на ось у, следовательно уравнение движения шпинделя будет

Мы получили два уравнения движения. Решаем их совместно.
Разделим уравнение (1) на а, а уравнение (2) на b
Возведем в квадрат и сложим эти уравнения; получим

но

а следовательно
Мы получили эллипс с осями, равными 2b и 2а.
При обработке сферических поверхностей a=b.
Следовательно горизонтальное движение будет выражено уравнением
а вертикальное движение
Возводим в квадрат полученные уравнения движений и складываем

но

Следовательно
Получили круговое движение а.
| название | год | авторы | номер документа |
|---|---|---|---|
| Профиленастраиваемое устройство с однокоординатным числовым программным управлением для обработки матриц пресс-форм | 1974 |
|
SU557882A1 |
| Устройство для фрезерования криволинейных поверхностей изделий | 1981 |
|
SU998000A1 |
| СПОСОБ ПОЛУЧЕНИЯ ОТРАЖАЮЩЕЙ ПОВЕРХНОСТИ РЕФЛЕКТОРА ЗЕРКАЛЬНОЙ АНТЕННЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2067340C1 |
| Устройство для обработки наружных и внутренних поверхностей деталей многоугольной формы | 1974 |
|
SU707512A3 |
| Устройство для бескопирной обработки профильных валов и втулок с равноосным контуром | 1976 |
|
SU666053A1 |
| Устройство замедленного и фиксированного останова шпинделя | 1986 |
|
SU1388262A1 |
| Устройство для обработки деталей сложной формы | 1978 |
|
SU742038A1 |
| Устройство для устранения затиранияРЕжущЕгО иНСТРуМЕНТА HA зубОдОлбЕжНОМСТАНКЕ | 1979 |
|
SU797849A1 |
| Устройство для обработки оптических деталей | 1990 |
|
SU1816659A1 |
| КУЛИСНО-РЫЧАЖНЫЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1994 |
|
RU2091641C1 |
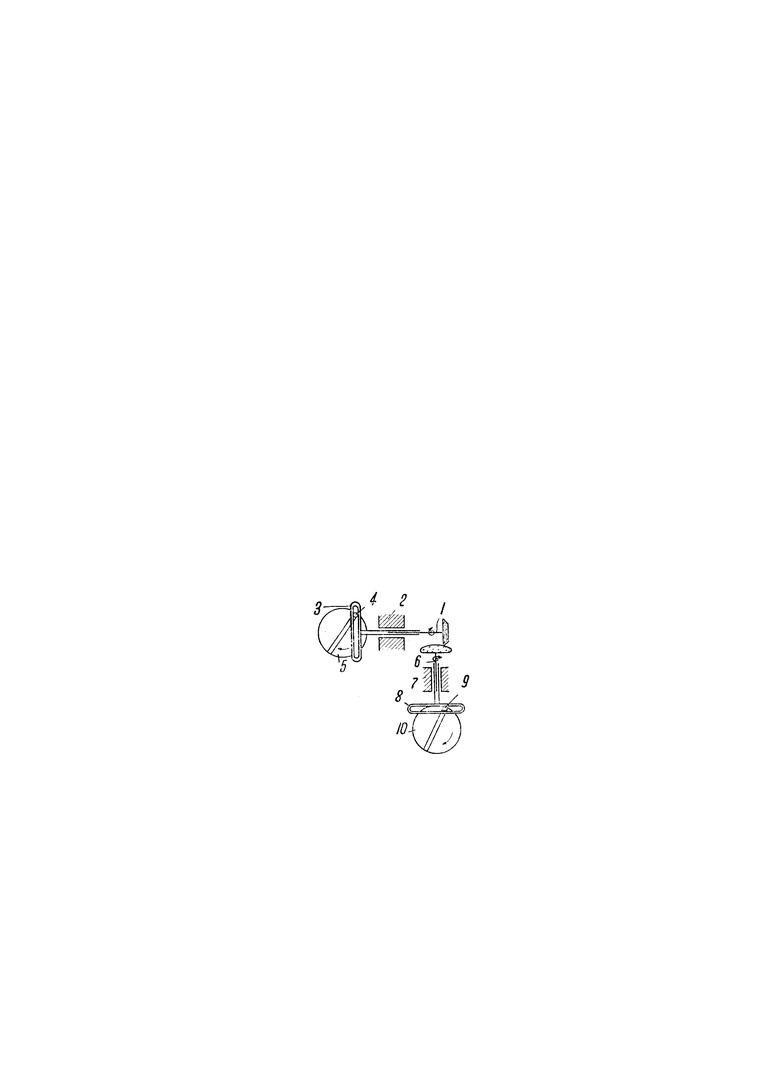
Станок для шлифования поверхностей вращения, образованных кривыми второго порядка, отличающийся применением расположенных под углом друг к другу шпинделей 1 и 6 соответственно для шлифовального круга и изделия, получающих помимо вращения согласованное осевое возвратно-поступательное движение от кривошипно-кулисных механизмов 4, 3 и 9, 8.
