Осуществление движения путем передачи между двумя валами с промежуточными телами вращения, причем эти тела приходят в соприкосновение с поверхностями вращения, из которых, по крайней мере, одна связана с первичным валом и одна-со вторичным валом, а также с неподвижною поверхностью вращения,-уже известно. Движение первичной поверхности вызывает качение промежуточного тела около оси вращения, проходящей через точки соприкосновения промежуточного тела с неподвижною поверхностью. Вследствие этого образуются усилия, действующие на вторичную поверхность в местах соприкосновения с означенною поверхностью. Расстояния между точками соприкосновения первичной поверхности, с одной стороны, и упомянутой осью вращения, с другой стороны, а также отношение между диаметрами кругов вращения и определяют передаточное число. Эти величины, а значит и передаточное число, могут быть изменены путем изменения взаимного расположения поверхностей.
Изобретение заключается в том, что по крайней мере две из поверхностей, с которыми взаимодействует каждое промежуточное тело вращения, приводятся в движение сходящимся образом в том направлении, в котором движется промежуточное тело от вращения первичного вала. Этим достигается то большое преимущество, что промежуточные тела сами, так сказать, зажимаются между поверхностями, так что нет нужды в особых устройствах для обеспечения достаточного давления по отношению к первичной, вторичной и третьей, в данном случае неподвижной, поверхностям. Промежуточное тело может быть произвольной формы, целесообразнее же делать его в виде шара.
Согласно форме выполнения изобретения получается соприкосновение каждого промежуточного тела с двумя вращающимися поверхностями, а также с такой поверхностью, которая по крайней мере с одной из указанных поверхностей сходится при ее относительном движении; в дальнейшем эта поверхность для краткости будет называться зажимающей поверхностью. Зажимающая поверхность может быть сделана плоской или кривой, но не может быть параллельной ни одной из остальных поверхностей вращения.
При этой форме выполнения каждое промежуточное тело получает движение качения по поверхностям вращения и при этом вращается около оси, которая является неподвижной по отношению к зажимающей поверхности. Передача согласно изобретению может быть устроена так, что путем взаимной перестановки поверхности или поверхностей, с которыми взаимодействует промежуточное тело, достигается изменение соотношения касательной и нормальной составляющей силы в точках соприкосновения. При этом можно достигнуть, чтобы означенное соотношение всегда было немного меньше коэфициента трения, что, с одной стороны, устраняет слишком большое прижимание, а с другой стороны, нет опасности скольжения. Осуществление перестановки может производиться тем, что поверхности смещаются в осевом направлении относительно друг друга, а также тем, что дают поверхностям взаимное угловое смещение.
Большим преимуществом передачи согласно изобретению является то, что нормальное давление, производимое промежуточными телами на поверхности, зависит от нагрузки вторичного вала, и это обстоятельство как раз обратно тому, что имеет место при вышеупомянутых известных конструкциях, в которых нормальное давление зависит от внешнего давления, производимого .на тела, взаимодействующие с промежуточными телами либо посредством пружины, либо гидравлическим путем, либо ины.м образом. В этих уже известных устройствах нормальные давления, производимые промежуточными телами на поверхности, не зависят от нагрузки вторичного вала, так что эти давления для устранения скольжения должны быть выбраны настолько большими, чтобы их хватило даже для наибольших нагрузок, для которых рассчитана передача. Если передача употребляется для меньшей нагрузки,
то нормальное даг1ление остается тем же, т. е. слишком большим и создает плохой коэфициент использования. Совершенно иначе дело обстоит в передачах согласно изобретению, ибо нормальные давления в них возрастают или понижаются в зависимости от нагрузки вторичного вала.
В результате последнего упомянутого свойства можно достигнуть при изменении нагрузки автоматической установки передаточного числа. С этой целью по крайней мере одна из поверхностей делается подвижною по отношению к другой и именно так, что установка этой поверхности зависит, с одной стороны, от внешней силы и, с другой стороны, от усилий, передаваемых промежуточным телом на эту поверхность. Под „внешней силой понимается такое усилие, которое не зависит от сил, действующих между поверхностями и промежуточными телами. Эта внешняя сила может быть образована, например, пружиною, гидравлическим путем или как-нибудь иначе.
Можно придать поверхностям такую конструкцию, чтобы отношение между нормальными давлениями на поверхности вращения приблизительно соответствовало всегда отношению касательных усилий, что, понятно, в значительной степени повышает коэфициент полезного действия.
Для того, чтобы передачу сделать в достаточной степени чувствительной для малых перестановок поверхностей, что может оказаться весьма желательным для автоматической установки, в качестве образующей поверхности вращения берется такая кривая, кривизна которой весьма мало отличается от образующей поверхности промежуточного тела.
Чтобы избежать отскакивания промежуточных тел от места зажима их между поверхностями, вследствие чего они могли бы оказаться не участвующими в передаче движения, и коэфициент полезного действия мог бы пострадать, и даже могла бы оказаться невозможной передача вращения,-эти тела можно устраивать в особой клетке, которая может участвовать в их движении и которая устраняет возможность слишком большого отставания какого-нибудь из промежуточных тел.
Согласно форме выполнения по крайней мере одна из поверхностей является самоустанавливающейся. При применении нескольких промежуточных тел такая автоматическая установка оказалась полезной, так как усилия, приходяшиеся на различные тела, вследствие этого оказывались в значительной степени одинаковыми.
На чертеже изображен пример выполнения передачи.
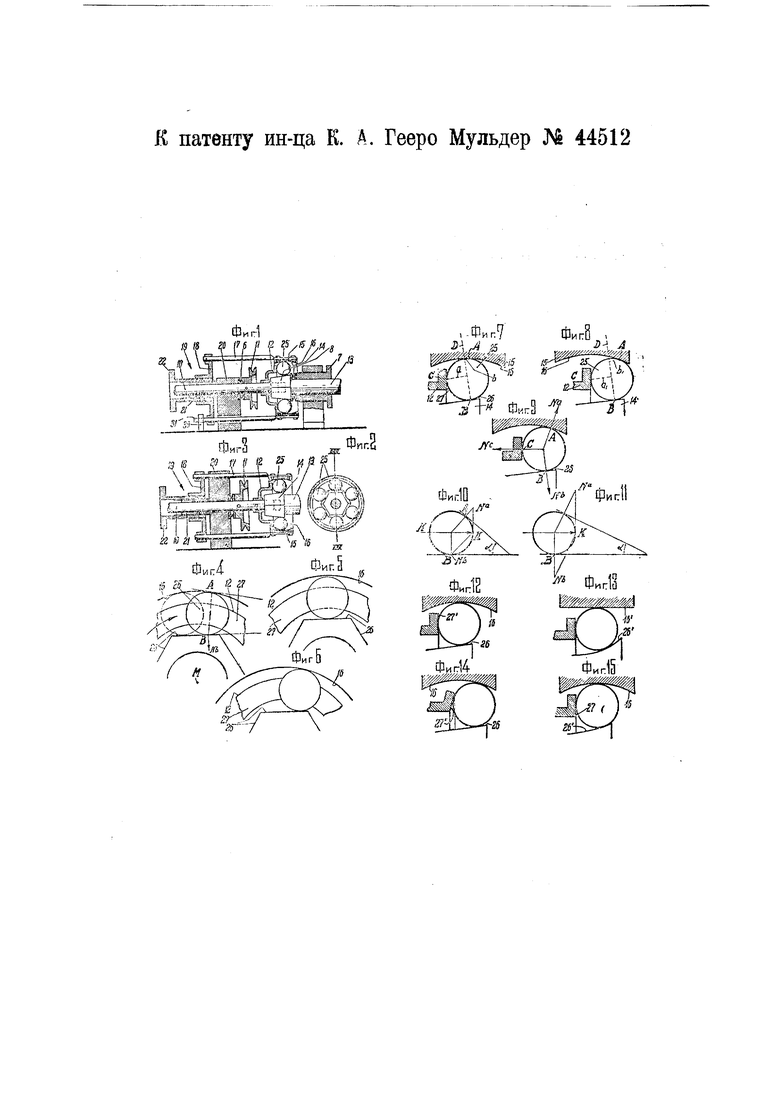
Фиг. 1-3 дают форму выполнения изобретения в продольном и поперечном разрезе. Передача состоит из первичного вала 10, расположенного в подшипнике 20 и несущего канатны( шкив 11 и тело 12. По отношению к правому концу вала 10 является вращающимся пирамидальное тело 14, сделанное полым и соединенное со вторичным валом 13. Кольцо 15 устроено с шаровидною внутреннею поверхностью 16 и закреплено на штангах 17. Эти штанги сидят на теле 18, которое посредством диференциального винтового устройства 19 может быть передвигаемо по отношению к подшипнику 20. С этой целью на теле подшипника имеется выступающая втулка 21, сцепленная при помоши нарезки со втулкой 22, которая в свою очередь при помощи винтовой резьбы взаимодействует с телом 18, Между пирамидою 14, телом 12 и кольцом 15 вставлены шары 25, служащие для передачи движения между первичным валом 10 и вторичным валом 13. Тело 14 может благодаря шаровому подшипнику 8 воспринимать осевое давление, между тем как втулка 7, имеющая винтовую резьбу, допускает осевую установку этого тела 14. Тело 12 может воспринимать осевое давление благодаря шаровому подшипнику 6.
Как видно из фиг. 2, для передачи движения предусмотрены шесть шаров. Для ясности понимания принципа передачи движения на фиг. 4, 5 и 6 изображен шар с примыкающими к нему поверхностями видом с торца. Взаимодействующая с шаром поверхность тела 12 имеет обозначение 27, а тел 15 и 14-соответственно 16 и 26.
На фиг. 5 передача показана в состоянии покоя, когда шар, если представить себе поверхность 28 горизонтальной, занимает симметричное поло жение по отношению к этой поверхности. Если первичный вал, а значит и тело 12, вращается по направлению стрелки согласно фиг. 4, то шар поверхностью 27 движется вправо и оказывается, принудительным образом, между поверхностями 27, 16 и 26, так как эти поверхности сходятся в направлении, в котором шар перемещается из-за вращения тела 12, т. е. первичного вала.
На фиг. 7 и 8 шары показаны видом сбоку в разных положениях по отношению к поверхностям 26, 27 и 16. Благодаря вращению тела 12 и трению в точках соприкосновения шара 25 с поверхностью 27, в точке С по фиг. 7 образуется тангенциальное усилие, вследствие чего шар начинает катиться. Качение не может иметь места по поверхности 26, так как гфи этом движении шар тотчас же был зажат. Результат тот, что в точке соприкосновения с поверхностью 26 может оказаться либо скользящее движение, либо никакого. Из-за производимого шаром давления скольжение поглощает очень много энергии, в виду чего надо допустить, что движения, в точке В весьма ничтожны, и что полюс оси вращения приходится вблизи этой точки, если не в самой точке В.
Последнее допущение делается для простоты объяснения принципа передачи.
На фиг, 7 и 8 ось вращения обозначена D, а расстояние между точкою С и этою осью обозначено я или а. Тангенциальное усилие в точке С образует момент, вызывающий качение шара около оси D. Так как качение по поверхности 26 невозможно, то получается качение по неподвижной поверхности 16, в виду чего шар опускается и производит на пирамиду усилие, приводящее последнюю во вращение. Точка соприкосновения шара с поверхностью 16 обозначена А. На обеих фиг. 7 и 8 расстояние между точкою А и осью вращения D обозначено отрезками b или Ь. Можно видеть, что момент С У, а должен соответствовать, если пренебречь потерями на трение, моменту Л X i, и что расстояния с и Ь обусловливают передаточное число для передачи. При сравнении фиг. 7 и 8 можно установить, что путем передвигания тела 15 по отношению к телам 12 и 14 достигается изменение передаточного числа.
При принудительном движении шаров 25 между поверхностями 16, 27 и 2S образуются нормальные усилия на эти поверхности, что видно из фиг. 9. Так как шар находится в равновесии, то усилия N , N и JV находятся в определенном соотношении. Необходимо заметить, что эти усилия не находятся в одной плоскости, как можно было бы заключить по фиг. 9, но их взаимодействие фактически вытекает из параллелепипеда сил.
Усилие N также показано на фиг. 4. Кроме этого усилия N , появляется касательная сила в В, которая вместе с N образует момент Браш,ения около центра Л1, заставляюш,ий вращаться пирамидальное тело 14. Ясно, что этот момент больше, чем нагрузка вторичного вала, если происходит вращение последнего. Дальше видно, что появляющиеся в В усилия, вследствие зажимного движения шаров, зависят от момента, который необходим для преодоления нагрузки на вторичном валу, потому что при увеличении этих усилий при той же нагрузке на вторичном валу появилось бы более быстрое отхождение пирамиды, а стало быть, уменьшение возникающих в В усилий. Из вышесказанного можно понять, что нормальное давление в Д а следовательно произведенные шарами нормальные давления в Л и С зависят от нагрузки вторичного вала.
При сравнении фиг. 4 и б можно установить зависимость перемещения пирамиды 14 от соотношения между нормальными и тангенциальными усилиями. При движении пирамиды по фиг. 1 несколько вправо шары по фиг. 2 принимают по отношению к поверхности пиргмиды отличное от симметричного положение (фиг. 4 и б), причем касательные линии в точках А и В Ни фиг. б образуют больший угол.
чем на фиг. 4. На фиг. 10 и 11 взяты те же случаи, что на фиг. б и 4, с той только разницей, что указана действующая вправо сила К для перемещения шара. Из фиг. 6 и 10 видно, что нормальные усилия получаются значительно меньше, чем на фиг. 4 и 11. Этим устанавливается, что при одних и тех же тангенциальных усилиях можно путем перемещения пирамиды изменить соотношение между нормальными и тангенциальными усилиями. При соответствующем изменении и правильной установке можно достигнуть того, что нормальные давления Л и С всегда будут, например, в 10 раз больше, чем имеющиеся тангенциальные усилия, т. е. что не может быть никакого скольжения, а только качение. Соответствующей конструкцией можно, кроме того, достигнуть, что соотношение между нормальными давлениями на поверхности вращения 27 и 16 всегда будет приблизительно соответствовать соотношению тангенциальных усилий.
На фиг. 4 представлен способ приведения в движение 25 между поверхностями 26 и 16.. На практике оказалось, что шары иногда вдруг отскакивают назад и в результате движения поверхности 26 относительно поверхности 16 зажимаются в обратном направлении между обеими поверхностями (пунктирное положение, показанное на чертеже), вследствие чего может наступить внезапная остановка передачи. Для избежания этого согласно фиг. 19 и 20 устраивается клетка 36, охватывающая шары и не дающая ни одному из них отскакивать назад. Для того, чтобы шары всегда касались поверхности 27, ставится слабая пружина 37. Точное прилегание и постоянная работа шаров с определенным передаточным числом возможны только тогда, .когда поверхности 16 и 27 совпадают своими осями с осью пирамиды 14, когда все шары одинаковых размеров, и когда поверхности 26 пирамиды являются симметричными по отношению к оси пирамиды. Если это не имеет места, то шары будут работать с другим передаточным числом, так что произойдет скольжение. Для избежания
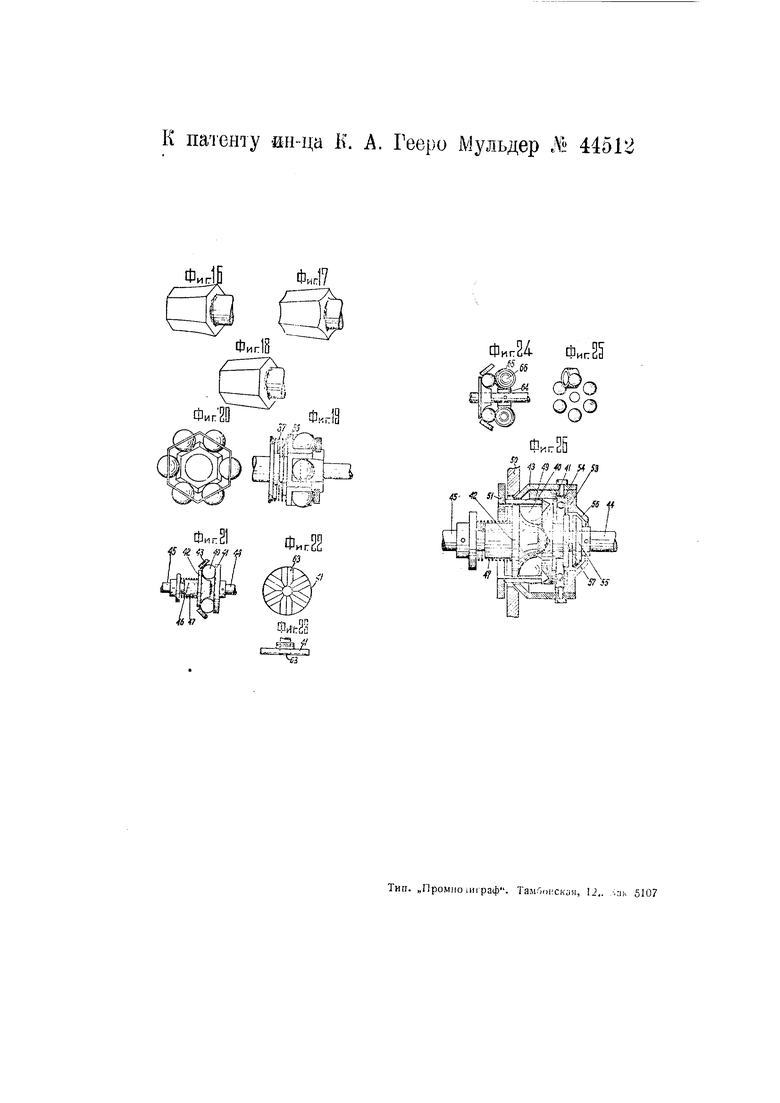
этой опасности тело 15, конструкция которого видна на фиг. 1, делается с автоматическою установкою. Штанги 17 устроены по всей своей длине свободно движущимися по отношению к подшипнику 20. Для возможности свободной установки кольца 15 и в то время для предотвращения вращения ставится упор 30, взаимодействующий с удлинением одной из штанг 17. Наконец, следует указать, что поверхности 16, 26, 27 могут быть выполнены отличным от изображенного на фиг. 5 образом. Так например, на фиг. 12 поверхность 27 образована, как поверхность вращения кривой образующей. На фиг. 14 поверхность 27 выполнена в форме шаровой поверхности. На фиг. 13 поверхность 16 является цилиндрической, а поверхность 26 вогнута. На фиг. 15 дана комбинация поверхности 27 с выгнутыми поверхностями 16 и 264 Необходимо заметить, что поверхность 26 не является поверхностью вращения и может быть выполнена так, как показано на фиг. 16. Фиг. 17 изображает другую форму выполнения этой поверхности. Примененная на фиг. 1 часть 14 представлена на фиг. 18.
Как уже было сказано, преимущество передачи согласно изобретению заключается в том, что нормальная сила зависит от нагрузки вторичного вала. Это преимущество весьма важно и по той причине, что оно позволяет устраивать передачу так, что передаточное число автоматически регулируется в зависимости от меняющейся нагрузки вторичного вала. Фиг. 21 дает форму выполнения такой передачи в боковом виде где опять имеются шары 40, каждый из которых замкнут между тремя относящимися к телам 41, 42, 46 поверхностями. Тело 41 является закрепленным на вторичном валу 44 диском с V-образными канавками 63, что видно на фиг. 22 и 23. Тело 43 устроено неподвижным и имеет коническую внутреннюю поверхность. Тело 42 может благодаря шпонке 43 двигаться по первичному валу туда и обратно и прижимается по направлению к телу 41. Когда первичный вал 45 начинает вращаться, тело 42 вращается вместе с ним.
Поверхность взаимодействующего с шарами 40 тела 42 является поверхностью вращения с образующей, изогнутой по кругу такого радиуса, который весьма мало отличается от радиуса шаров. Вследствие этого уже самое малое смещение тела 42 вызывает значительную перестановку точки соприкосновения между шарами и поверхностью вращения 42, что обеспечивает исключительную чувствительность всей передачи.
Пгредача действует по тому же принципу, что и изображенная на фиг. 1, так что нет надобности в подробном объяснении. Следует только сказать, что и здесь движение тгла 42 вызывает зажимание шаров между наклонными поверхностями канавок 63, а именно между одной из них, коническою поверхностью тела 43 и телом вращения 42. При катании щаров и здесь получается отдача на неподвижное тело 43 и поворачивание тела 41, а также вторичного вала 44. При смещении тела 42 переставляется точка соприкосновения менаду поверхностью вращения тела и шаром, в виду чего образуется новое передаточное число и притом тем большее, чем более влево передвинулось тело 42. При такой передаче, как уже сказано, нормальное усилие, передаваемое шарами на поверхности, является зависимым от нагрузки вторичного вала, так что при изменении нагрузки меняются и усилия, передаваемые шарами на тело 42. Так как установка тела 42 зависит, с одной сюроны, от пружины 47, а с другой стороны, от усилий, передаваемых шарами на тело 42, установка этого тела испытывает автоматическое изменение в зависимости от нагрузки вторичного вала 44. Если нагрузка вала 44 увеличивается, то усилия, передаваемые шарами 40, возрастают, чем вызывается передвижение тела 42 влево, а вместе с этим большее передаточное число; в обратном же случае, когда нагрузка понижается и тело 42 переставляется вправо, может наступить такое положение, при котором тело 42 настолько удаляется от тела 43, что шар может
не оказаться в соприкосновении с этим последним, а зажмется между телами 42 и 41. При таком зажиме шар останавливается и служит в качестве промежуточного тела для непосредственной передачи движения от первичного ко вторичному валу и притом с коэфициентом полезного действия в ЮО/о, так как отсутствует трение.
Когда шары движутся, происходит не качение их по наклонным поверхностям канавок 63, а скольжение, вследствие чего коэфициент полезного действия передачи снижается. На фиг. 24 и 25 представлена форма выполнения, при которой тело 41 заменено телом 64 с роликами 65. Эти ролики могут благодаря шариковым подшипникам и штифтам 66 враш,аться почти без трения. Таким путем скольжение превращается в качение, чем коэфициент полезного действия в значительной мере повышается.
Наконец, на фиг. 26 дана форма выполнения передачи согласно фиг. 21, причем автоматическая устанавливаемость скомбинирована с размыканием и с обратимостью передачи движения. На теле 41 закреплено кольцо 51 посредством выступающих стержней 49. Тело 43 снабжено кольцом 53. Благодаря шарам 40 с одной стороны и шариковому подшипнику 54 с другой, тело 43 закрепляется по отношению к телу 41, так что достигается возможность совместного движения, например, в направлении оси тела 41. Кольцо 53 сделано с коническою поверхностью 56, которая может работать вместе с коническою поверхностью расположенного на вторичном валу тела 55. Кроме того устроено кольцо 50, могущее перемещаться в осевом направлении и осуществляющее остановку, а также одновременно осевое смещение кольца 51 или тела 43. Если кольцо 50 подается влево, то вследствие соприкасания с кольцом 51 получается перестановка влево и задержка тела 41. В то же время имеет место перестановка в том же направлении тела 43 вместе с кольцом 53 и прилегание поверхности 56 к телу 55. Когда при этом начинает вращаться первичный вал, то от этого получается движение в противоположном направлении тела 43, а значит и вала 44. Если кольцо 50 подвигается вправо, то тело 43 переходит вправо и останавливается, причем одновременно получается такая же перестановка тела 41 и удаление поверхности 56 от тела 55 с одновременным прилеганием тела 57 к телу 55. При вращении первичного вала 45 вал 44 вращается в том же направлении. Когда кольцо 50 находится в среднем положении, показанном на фиг. 26, то валы 44 и 45 разъединены. Как при левом положении, так и при правом положении кольца получается передача движения и одновременно автоматическая регулировка передаточного числа в зависимости от нагрузки вторичного вала.
Движения, выполняемые телом 50 или телами 53 и 57 для осуществления соединения или разъединения с телом 55, должны быть возможно малыми. Для большей ясности на фиг. 26 промежутки между поверхностью 56, телом 55 и телом 57 представлены довольно большими. Фактически эти зазоры весьма малы.
Вышеописанная передача должна обеспечить значительный успех в области передач для моторных повозок. Понятно, область применения не ограничивается только этим,так как изобретение может найти себе применение во всех областях, где требуется постепенный переход передаточных отношений между двумя валами и в частности автоматическая регулировка таковых в зависимости от вторичной нагрузки.
Предмет изобретения.
1.Переменная фрикционная передача между двумя валами, заключающая в себе одну не вращающуюся и две вращающиеся поверхности, взаимодействующие с помещенными между ними телами вращения, Отличающаяся тем, что взаимодействующие с телами вращения не вращающаяся и вращающаяся ведомая поверхности сближаются друг с другом Б направлении, в котором под действием вращающейся ведущей поверхности катятся тела вращения2.Форма выполнения передачи по п. 1, отличающаяся тем, что в целях
сближения друг с другом не вращающейся поверхности 16 (фиг. 1-б) и ведомой поверхности 26, последняя представляет собою боковую поверхность пирамиды с плоскими (фиг. 16, 18) или вогнутыми (фиг. 17) по ширине гранями.
3,Форма выполнения передачи по п. 1, отличающаяся тем, что, в целях сближения друг с другом не вращающейся поверхности и поверхности вращающейся, последняя представляет собою грани радиальных канавок 63 (фиг. 21-23).
4.Форма выполнения передачи по п. 1, отличающаяся тем, что, в целях сближения друг с другом не вращающейся поверхности и ведомой поверхности, последняя представляет собою боковую поверхность 65 (фиг. 24) тел вращения, которые поворотно около своей оси смонтированы на ведомом
элемента 64 таким образом, что плоскость, касательная к этой поверхности 65 в точке касания последней с промежуточным телом, пересекает ось вращения ведомого элемента под острым углом.
5.Форма выполнения передачи по пп. 1 -4, отличающаяся тем, что ось вращения каждого промежуточного тела проходит точно или приблизительно через точку соприкосновения этого тела с ведомой поверхностью.
6.Форма выполнения передачи по пп. 1-4, отличающаяся тем, что, в целях автоматического изменения передаточного отношения в зависимости от нагрузки, одна или несколько поверхностей, взаимодействующих с промежуточными телами, могут под действием этих тел перестанавливаться вдоль своей оси против действия пружины или другой силы.
ФигЗ
g и Г (/ и f « ,-д ,
,епа-|гагдд, ..J / //
,3( /..febS
9t|xfr
1мУл
k « &|шз--. V
и IS Фип5
W с5 А & il .
к L.-;--f-i п ШигЗ
Фиг:1§
Фиг24. Фиг25
| название | год | авторы | номер документа |
|---|---|---|---|
| Велосипед | 1932 |
|
SU44515A1 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ | 2008 |
|
RU2465497C2 |
| УСОВЕРШЕНСТВОВАНИЯ В ПОЗИЦИОННЫХ СЕРВОСИСТЕМАХ ИЛИ ОТНОСЯЩИЕСЯ К ТАКИМ СИСТЕМАМ | 1995 |
|
RU2149787C1 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ (RVT) С ПОВЫШЕННОЙ УДЕЛЬНОЙ МОЩНОСТЬЮ | 2013 |
|
RU2654431C2 |
| ПЕРЕДАЧА И ПРИВОД ВСПОМОГАТЕЛЬНЫХ АГРЕГАТОВ С ПОСТОЯННОЙ СКОРОСТЬЮ | 2004 |
|
RU2315216C9 |
| ДВУХСТУПЕНЧАТЫЙ ЗУБЧАТЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2000 |
|
RU2190137C2 |
| ПРИВОД | 2000 |
|
RU2265764C2 |
| Механическая коробка передач (варианты) | 2019 |
|
RU2715829C1 |
| ФРИКЦИОННО-ПЛАНЕТАРНЫЙ МЕХАНИЗМ С КОСОЙ ШАЙБОЙ И БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА НА ЕГО ОСНОВЕ | 2000 |
|
RU2179671C1 |
| СТУПЕНЬ ПЕРЕДАЧИ ИСПОЛНИТЕЛЬНОГО ПРИВОДА | 2006 |
|
RU2402433C2 |