Изобретение относится к области станкостроения. Известны приводы металлорежущи станков, содержащие асинхронный электродвигатель и механизм подачи ттольЕого типа, пиноль которого соединена с самотормозящейся резьбой, вращение на которую передается через муфту сколь жения. Недостатком известного привода является резкое снижение к.п.д, при широком диапазоне регулировани величины подачи. Для расширения диапазона регулирования подачи о малыми потерями мощности предлагаемЕГй привод снабжен вторым асинхронным двигателем, ротор которого закреплен на валу привода главного движения, а статор соединен с винтом, причем скорости вращения вала и магнитного поля статора второго электродвигателя совпадают по направлению и связаны зависимостью: ,:)i скорость рабочей подачи; скорость вращения вала, на котором закреплен ргь тор второго электродвигателя;скольжение во втором асинхронном двигателе; скорость вращения магнитного поля статора; шаг винтовой нарезки пиноли. Для регулирования величины почи в кинематической цепи привода авного движения до ротора второэлектродвигателя может быть уставлен механизм изменения числа оротов, например вариатор. На чертеже приведена кинемаеская схема привода.
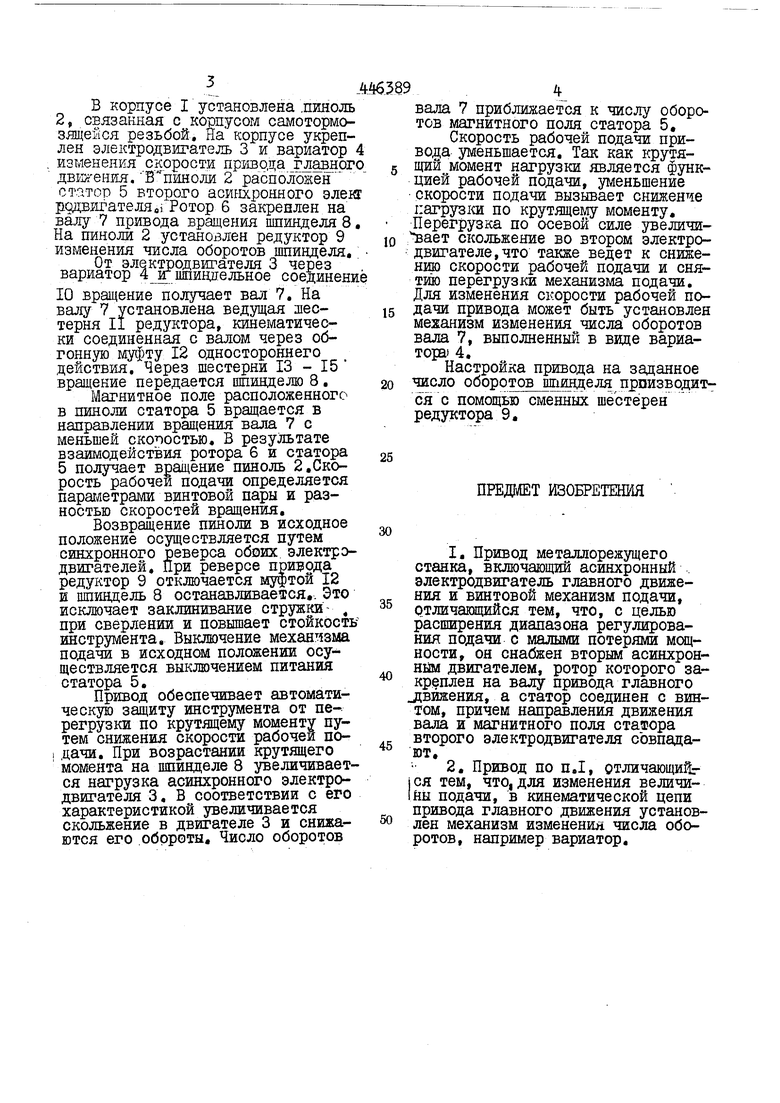
В корпусе I установлена .пияоль 2, СЕязакная с корпусом самотормозящейся резьбой. На корпусе укреплен электродвигатель 3 и вариатор изменения скорости привода главног
дв11йения. Впаноли 2 расположен
статор 5 второго асинхронного элек родвйгателЯв Ротор 6 закреплен на валу 7 привода вращения шпинделя 8 На пиноли 2 установлен редуктор 9 изменения числа оборотов шпинделя,
От электродвигателя 3 через вариатор шпидпельное соединени
10 вращение получает вал 7. На валу 7 установлена ведущая шестерня II редуктора, кинематически соединенная с валом через обгонную муфту 12 одностороннего действия. Через шестерни 13-15 вращение передается шпинделю 8.
Магнитное поле расположенного в пиноли статора 5 вращается в направлении вращения вала 7 с меньшей скоростью. В результате взаимодействия ротора 6 и статора 5 получает вращение пиноль 2,Скорость рабочей подачи определяется параслетрами винтовой пары и разностью скоростей вращения.
Возвращение пиноли в исходное положение осуществляется путем синхронного реверса обоих электродвигателей. При реверсе привода, редуктор 9 отключается муфтой 12 и шпиндель 8 останавливается.. Это исключает заклинивание стружки- , при сверлении и повышает стойкость инструмента. Выключение механизма подачи в исходном положении осуществляется выключением питания статора 5,
Привод обеспечивает автоматическую защиту инструмента от перегрузки по крутящему моменту путем снижения скорости рабочей по1 цачи. При возрастании крутящего 1йомента на шпинделе 8 увеличивается нагрузка асинхронного электродвигателя 3, В соответствии с его характеристикой увеличивается скольжение в двигателе 3 и снижаются его обороты. Число оборотов
вала 7 приближается к числу оборотов магнитного поля статора 5,
Скорость рабочей подачи привода уменьшается. Так как крутящий момент нагрузки является функцией рабочей подачи, уменьшение скорости подачи вызывает снижение 1:агруз1ш по крутящему моменту. Перегрузка по осевой силе увеличи вает скольжение во втором электродвигателе,что также ведет к сниженш скорости рабочей подачи и снятш перегрузки механизма подачи. Для изменения скорости рабочей подачи привода может быть установлен механизм изменения числа оборотов вала 7, выполненный в виде вариатора) 4,
Настройка привода на заданное сло оборотов шпинделя прпизводитс я с помощью сменных шестерен редуктора 9,
ПРЁД1ЛЕТ ИЗОБРЕ
1,Привод металлорежущего станка, включающий асинхронный . электродвигатель главного движения и винтовой механизм подачи, отжчающийся тем, что, с целью расширения диапазона регулирования подачи с малыми потерями мсяцности, он снабжен вторым асинхронным двигателем, ротор которого закр плен на валу привода главного
.движения, а статор соединен с винтом, причем направления движения вала и магнитного поля статора второго электродвигателя совпадают,
2,Привод по п,1, отличающий |ся тем, что, для изменения величи1Ны подачи, в кинематической цепи привода главного движения установлен механизм изменения числа оборотов, например вариатор.