Известны механические каскады, состоящие из двух трехфазных асинхронных двигателей со ступенчатым регулированием скорости привода. Один из асинхронных двигателей обычный, с кольцами, другой имеет вращающиеся первичную и вторичную системы, из которых одна механически связана с валом первого двигателя, а вторая - с валом приводного механизма.
Особенностью предлагаемого каскада является применение для обоих двигателей режима двойного питания как с вращением полей в одну сторону, так и с вращением их в разные стороны.
Этим обеспечивается ступенчатое экономическое регулирование скорости с увеличенным числом ступеней при работе от трехфазной сети нормальной частоты.
Двигатель вспомогательный может быть выполнен с числом пар полюсов больщим, чем у основного двигателя. Для синхронизации вспомогательного двигателя моменты инерции масс на валу привода и нэ валу роторов обоих двигателей подбирают так, чтобы при разгоне, выбеге и реверсе обеспечивалось допустимое отклонение скорости от заданной величины при переходе к данной синхронной скорости.
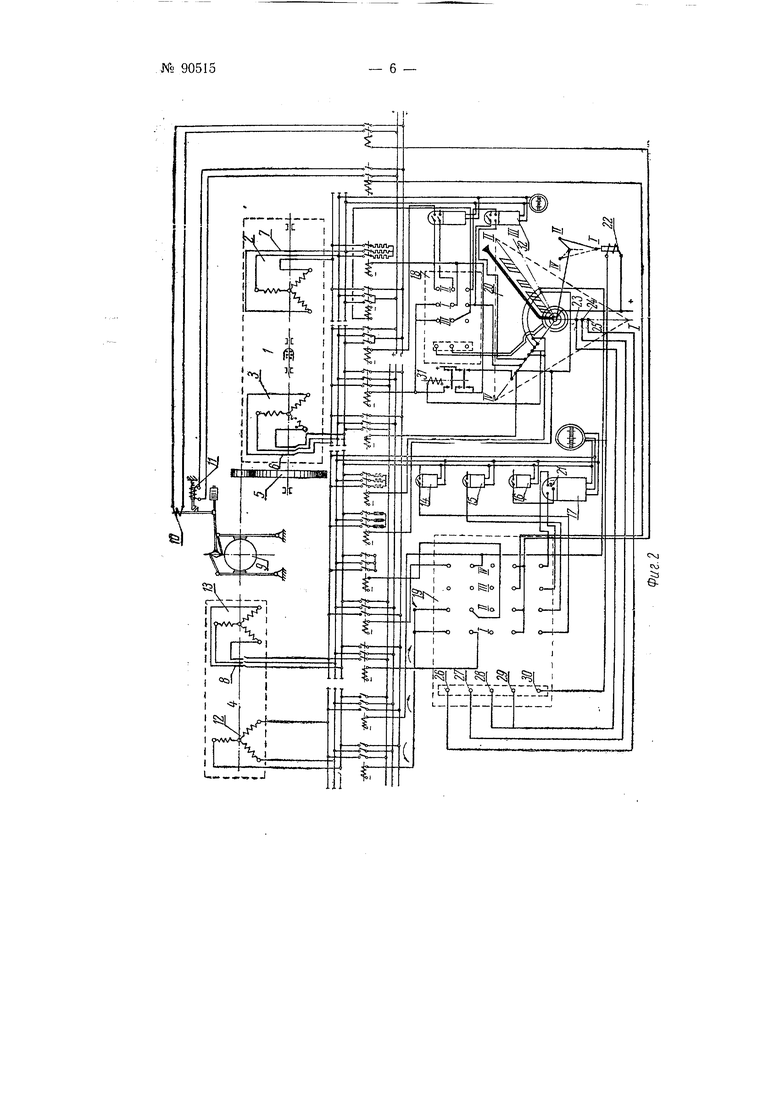
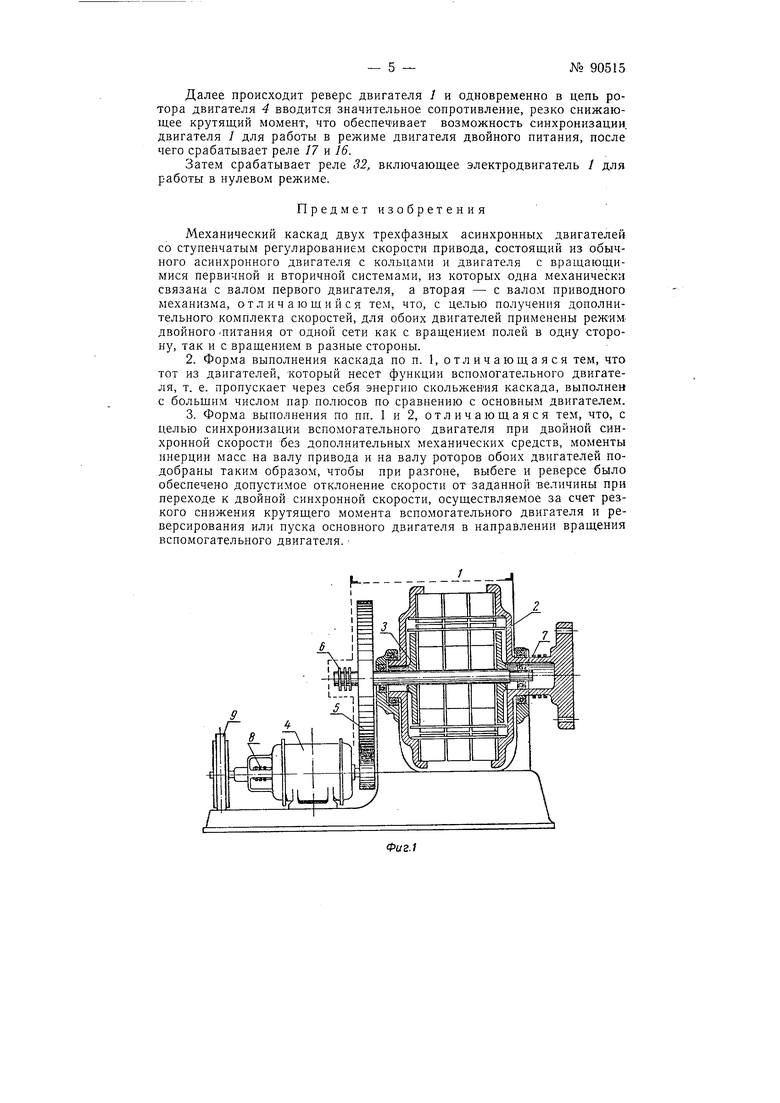
На фиг. 1 изображен общий вид каскада; на фиг. 2 - его принципиальная электрическая схема.
Как видно из фиг. 1 и 2 в механическом каскаде применен асинхронный двигатель / с двумя роторами 2 п 3, вращающимися один внутри другого и вокруг одной и той же геометрической оси. Вал внешнего ротора механически соединен с валом привода, вал внутреннего ротора - с валом ротора вспомогательного электродвигателя 4 посредством редуктора 5. В пазах каждого из роторов уложена обмотка, концы которой выведены на контактные кольца 6 и 7 роторов.
Вспомогательный двигатель 4, вал которого одним концол соединен посредством редуктора 5 с валом внутреннего ротора 3, представляет собой обычный асинхронный двига1ель с контактными кольцами 8. На другом свободном конце вала двигателя установлен диск механического тормоза 9, управляемого (фиг. 2) электромагнитами включения 10 и отключения 1L
№ 905t5- 2 -
« .1 #.-«.
I Механический каскад, получает питание от сети переменного тока HopMa bHofiMacTbtk. f.
С)сновной двигатель 1 может иметь число оборотов (1-s) ,
а при работе как синхронизированный асинхронный двигатель
«1 60 .
При торможении вспомогательного двигателя 4 вал привода будет иметь число оборотов, равное числу оборотов основного двигателя 1. При работе вспомогательного двигателя 4 как; асинхронного двигателя число оборотов привода
n, ,} + n, асинхронного генератора числооборотов привода
п, -к -()+n,
машины дйойного питания в двигательном режиме число оборотов привода
, 120/ ,
-{-к - -f i,
машины двойного питания в генераторном режиме число оборотов привода п к - + «1.
При питании роторов основного двигателя постоянным или переменным током, возбуждаюш.им направление вращения магнитных полей обоих роторов в одну и ту же сторону (режим работы машины двойного питания), число оборотов двигателя будет равно нулю.
Комбинируя различные режимы работы, можно получить, при условии синхронизации основного двигателя путем включения постоянного тока в один из его роторов, двенадцать ступеней скорости. При отсутствии постоянного тока можно получить семь ступеней скорости.
Пускорегулируюшее устройство (фиг. 2) служит для установления необходимых режимов работы двигателей 1 v. 4.
Установление во время вращения основного двигателя 1 разных режимов - генераторного синхронного, мащины двойного действия или нулевого - работы достигается путем подключения к обмотке статора 12 двигателя 4 напряжения переменного тока.
Руководствуясь показанием частотомера при неавтоматическом управлении, или посредством реле частоты 14, 15 или 16 и реле 17 направления вращения магнитного поля, при автоматическом управлении замыкающих свои контакты соответственно при тройной и двойной или нормальной частоте (и соответствующем направлении магнитного поля), осуществляется схема, соответствующая одному из выщеуказанных режимов.
Установление синхронного двигательного режима, как мащины двойного питания, осуществляется следующим образом.
В исходном состоянии оба двигателя 1 и 4 работают в асинхронном режиме. В цепь ротора двигателя 4 вводится значительное сопротивление, резко снижающее его вращающий момент. Одновременно электродвигатель / реверсируется, вследствие чего при достаточной величине момента инерции (приведенного к валу внешнего ротора 2 и
Pi PI
Pt
120/1 ,
привода) число оборотов внутреннего ротора 3 и связанного с ним передачей ротора 13 двигателя 4 начинает возрастать, частота в цепи ротора }3 доходит до величины нормальной частоты, питающей сети. После этого, руководствуясь показанием частотомера и указателем направления вращения магнитного поля при неавтоматическом устройстве управления, или при автоматическом управлении посредством реле 14, замыкающего свои контакты при нормальной частоте, равной частоте питающей сети, и реле J5 направления вращения магнитного поля осуществляется схема питания двигателя 4, соответствующая синхронному двигательному режиму двойного питания.
Установление нулевого режима двигателя 1 в начале работы агрегата осуществляется посредством питания обоих роторов 2 и 3 постоянным током или включением в цепь обоих роторов переменного тока, обусловливающего вращение магнитных полей в одну сторону (режим двойного питания).
Установление нулевого режима двигателя 1 во время работы осуществляется включением в цепь ротора двигателя 1 значительного сопротивления, обусловливающего снижение числа оборотов двигателя, после чего по достижении в цепи ротора частоты питающей сети осуществляется включение, аналогичное указанному в предыдущем пункте.
Основная аппаратура пускорегулирующего устройства состоит из трех контроллеров или командо-контроллеров 18, 19 и 20.
Командо-контроллер 18 служит для пуска и остановки основного электродвигателя / и должен иметь следующие два основных положения:
Положение / - соответствующее работе асинхронного двигателя 7.
Положение // - соответствующее остановке асинхронного дв)1гателя 1,
Кроме того, контроллер 18 может иметь еще положение ///, соответствующее работе синхронизированного асинхронного двигателя.
Командо-контроллер 19 для управления вспомогательным двигателем 4 должен иметь следующие четыре положения, соответствующие подготовке схемы к режимам работы:
Положение / - при расторможенном тормозе 9 соответствует синхронному генераторному режиму работы, как мащины двойного питания.
Положение // - при расторможенном тормозе 9 соответствует режиму работы асинхронного генератора.
Положение /// - при заторможенном тормозе 9 соответствует числу оборотов двигателя 4 равном нулю.
Положение IV - при расторможенном тормозе 9 соответствует режиму работы синхронного двигателя двойного питания.
Этот командо-контроллер имеет механическую блокировку с команда-контроллером 20, позволяющую переставлять контроллер 19 из одного положения в другое только при установке командо-контроллера 20 в положение //.
Командо-контроллер 20 для управления вспомогательным двигателем 4 и реверсирования .двигателя / имеет четыре рабочих положения.
Положение / соответствует работе двигателя 4 в режимах: генераторного синхронного, как машины двойного питания и генераторного асинхронного.
Положение // соответствует работе двигателя 4 в режиме асинхронного двигателя.
- 3 -.N° 90515
№ 90515
Положение /// соответствует работе двигателя 4 в режиме асинхронного двигателя, но с введенным в цепь ротора значительным сопротивлением, обусловливающем резкое снижение крутящего момента.
Положение IV подготаъливает двигатель 4 к работе в синхронном двигательном режиме двойного питания, т. е. обеспечивает возможность синхронизацни,. причем двигатель 1 реверсируется в то время, как двигатель 4 работает в двигательном режиме, но с резко ослабленным крутящим моментом, что достигается посредством введения значительного сопротивления в цепь ротора двигателя 4, причем частота тока ротора приближается к частоте питающей сети.
Последовательность действий для перехода к синхронному двигательному режиму двойного питания следующая: контроллер 20 устанавливается в положение //, а контроллер 19 - в положение IV. Далее контроллер 20 переключается из положения // в положение IV.
После автоматического осуществления синхронизации, согласновыщеописанному, срабатывают реле частоты 16 и реле 17 направления вращения магнитного поля, которое замыкает свой контакт 21, после чего оперативный ток проходит через переключающую катушку 22 и командо-контроллер 20 перебрасывается из положения /// в положение 1, вследствие чего замыкаются на + контакты 23, 24 и 25, питающие 1гередвижные контакты 26, 27, 28, 29 и 30 командо-контроллера 19, и осуществляется работа двигателя 4 в синхронном двигательном режиме двойного питания.
Последовательность действий для перевода двигателя 4 в генераторный синхронный режим, мащины двойного питания и генераторный асинхронный режим следующая:
Исходным положением командо-контроллера 20 является положение //,
На командо-контроллере 19 устанавливается положение / и //, или ///.
В цепь ротора двигателя 4 вводится значительное сопротивление, что достигается перестановкой командо-контроллера 20 в -положение JII, обусловливающее резкое снижение крутящего момента.
Число оборотов двигателя 4 начинает убывать, доходит до нуля, после чего ротор начинает вращаться в обратную сторону, при этом частота тока в цепи ротора двигателя 4 будет возрастать от О до однократной, двухкратной и трехкратной частоты питающей сети, причем последовательно будут срабатывать и замыкать свои контакты реле 16, 15 и 14, цепь оперативного тока замкнется только при той частоте, которая соответствует положепию контроллера 19, когда переключающая катущка 22 командо-контроллера 20 сработает и переключит его в положение /. Затем, через контакты 23, 24 и 25 оперативный ток будет замкнут на передвижные контакты 26, 27 и 28 командо-контроллера 19, после чего осуществится схема соответствующего режима.
Для установления синхронного двигателя режима двойного питания вспомогательного двигателя 4 при условии, что основной двигатель / работает в нулевом режиме, последовательность действий следующая.
В исходном положении вспомогательный двигатель 4 работает в асинхронном двигательном режиме, а основной двигатель работает в нулевом режиме.
Установкой командо-контроллера 20 в положение JV включается; цепь питаиия промежуточного реле 31 и двигатель 1 пускается в ход,, причем внещний ротор двигателя вместе с валом привода достигает такого числа оборотов, при котором частота ротора достигает величины QJ, при которой срабатывает частотное реле 16.
Далее происходит реверс двигателя 1 и одновременно в цепь ротора двигателя 4 вводится значительное сопротивление, резко снижающее крутящий момент, что обеспечивает возможность синхронизации двигателя / для работы в режиме двигателя двойного питания после чего срабатывает реле 17 и 16.
Затем срабатывает реле 32, включающее электродвигатель / для работы в нулевом режиме.
Предметизобретения
Механический каскад двух трехфазных асинхронных двигателей со ступенчатым регулированием скорости привода, состоящий из обычного асинхронного двигателя с кольцами и двигателя с вращающимися первичной и вторичной системами, из которых одна механически связана с валом первого двигателя, а вторая - с валом приводного механизма, отличающийся тем, что, с целью получения дополнительного комплекта скоростей, для обоих двигателей применены реж-им. двойного .питания от одной сети как с вращением полей в одну сторону, так и с вращением в разные стороны.
2.Форма выполнения каскада по п. 1, отличающаяся тем, что тот из двигателей, который несет функции вспомогательного двигателя т. е. пропускает через себя энергию скольжения каскада, выполнен с больщим числом пар. полюсов по сравнению с основным двигателем.
3.Форма выполнения по пп. 1 и 2, отличающаяся тем, что, с целью синхронизации вспомогательного двигателя при двойной синхронной скорости без дополнительных механических средств, моменты инерции масс на валу привода и на валу роторов обоих двигателей подобраны таким образом, чтобы при разгоне, выбеге и реверсе было обеспечено допустимое отклонение скорости от заданной величины при переходе к двойной синхронной скорости, осуществляемое за счет резкого снижения крутящего момента вспомогательного двигателя и реверсирования или пуска основного двигателя в направлении вращения вспомогательного двигателя.
-№ 90515

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания постоянства скорости двигателей постоянного тока | 1936 |
|
SU54927A1 |
| Двухдвигательный электропривод с электромеханическим преобразователем частоты | 1990 |
|
SU1713073A1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Способ запуска газотурбинного двигателя | 2019 |
|
RU2717477C1 |
| Каскад двухасинхронных двигателей | 1942 |
|
SU63399A1 |
| Способ запуска газотурбинного двигателя | 2018 |
|
RU2680287C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Агрегат бесперебойного электроснабжения | 1988 |
|
SU1658281A1 |
| СПОСОБ ЭЛЕКТРОСТАРТЕРНОГО ЗАПУСКА АВИАЦИОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2566806C1 |
| Ветроэнергетическая установка | 2021 |
|
RU2770526C1 |