1
Изобретение относится к обла сти техники линейных измерений, в частности к средствам для измерения несоосности отверстии.
Известны устройства для измерения несоосности отверстий, содержащие корпус, узлы центрирования корпуса, два закрепленных на корпусе базовых упора, два измерителя линейных перемещений, удаленных от базовых упоров на заданное расстояние, и узел компенсации гравитационного прогиба корпуса, выполненный в виде рычагов и противовесов.
Недостатком известных устройст является недостаточная точность вследствие неполной компенсации гравитационного прогиба корпуса и пониженная производительность контроля вследствие дополнительных затрат времени на регулировку противовесоБ.
Предлагаемое устройство отличается от известного тем, что узел
компенсации гравитационного прогиба корпуса выполнен в виде расположенной вдоль корпуса концевой меры и двух несущих измерителей линейных перемещений Г-образных рычагов, одни плечи которых вытянуты вдоль корпуса, вторые - расположены радиально и взаимодействуют с,концевой мерой, а оси рычагов проходят через центры тяжести сечений корпуса Б плоскостях безовых упоров.
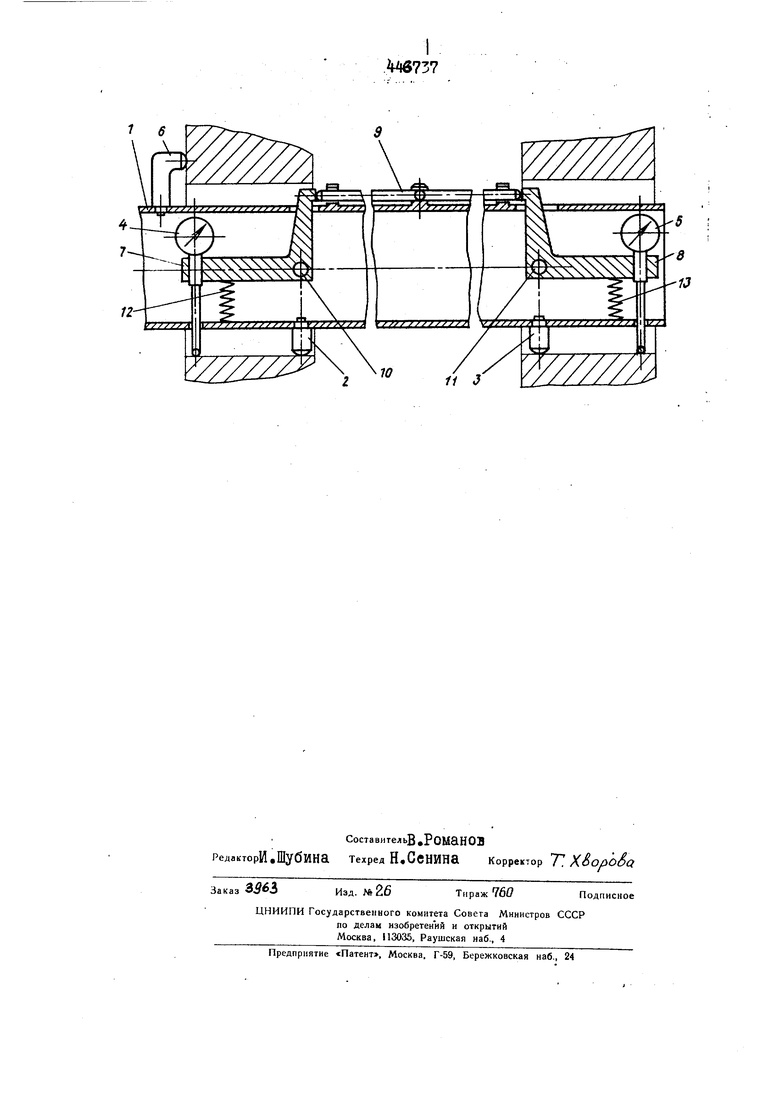
На чертеже изображено предлагаемое устройство.Оно содержит корпус I, выполненный- в виде трубы узлы центрирования корпуса Б отверстии (на чертеже не показаны), два базовых упора 2 и 3 и два измзрителя 4 и. 5 линейных перемещений,.удаленных от базовых упоров на расстояние С , определяемое базой измерения. Для осевой Фиксации корпуса устройство снабжено осевым упором 6. Для того чтобы исключить влияние гравитационного прогиба
корпуса на результат измерения, устройство снабжено узлом компенсации гравитационного прогиба, выполненным в виде двух Г-образных рычагов 7 и 8 и концевой меры 9 со сферическими концами. Оси 10 и II Г-образных рычагов расположены в плоскостях, перпендикулярных оси корпуса, плоскостях базовых упоров и проходят через центр тяжести сечения корпуса. Вытянутые вдоль корпуса .плечи Г-образных рычагов несут
измерители и 5 линейных перемещений, а радиально располоу.ешше - взаимодействуют с концевой мерой 9. Прижим Г-образных рычагов к концевой мере осуи1ествляется прулинаии 12 и 13.
Устройство работает следующим образом.
Вводят устройство в контролируемое отверстие и приводят во взаимодействие с образующими отверстий базовые упоры 2 и 3, а также измерительные наконечни1Ш измерителей 4 и 5 линейных перемет щений; поворачивают корпус на 360 и регистрируют при этом показания измерителей линейных перемещений; максимальную разность показаний измерителей принимают за величину несоосности.
Благодаря тому, что оси 10 и II Г-образных рычагов размещены в плоскостях базовых упоров 2 и 3, вертикальное смещение этих осей при изгибе корпуса будет ничтожным. Благодаря тому, что упомянутые оси проходят через центры тякести сечений корпуса, они лекат в так называе.мом нейтральном слое и сближение осей при изгибе корпуса также можно считать пренебрежимо малым. Аналогично можно считать неизменящейся при изгибе длину концевой меры. Положение двух точек Г-образных рычагов (оси и конца радиального плеча) можно считать практически не зависящим от гравитационного прогиба корпуса, деформацию самих Г-образныхрычагов вследствие малости длин их плеч сравнительно с длиной корпуса также можно считать несущественной.
Таким образом, предложенное устройство позволяет почтм полностью устранить влияние гравитационного прогиба корпуса на результат измерения несоосности отверстий.
ПРЕдаЕТ КоОЕРЕТЕШ1Я ,. Устройство для измерения несооснОсти отверстий, содержащее корпус, узлы центрирования корпу са, два закрепленных на кори-усе базовых упора, два измерителя линейных перемещений, удаленных от базовых упоров на заданное расстояние, и узел компенсации гравитационного прогиоа корпуса, отличающееся тем,что, с целью повышения ,- «
производительности и точности измерений, узел компенсации гравитационного прогиба корпуса выполнен в виде располокенной вдоль корпуса концевой меры и двух несущих измерителей линейных перемещений Т-образных рычагов, одни плечи которых вытянуты вдоль корпуса, вторые - расположены радиально и взаимодействуют с концевой мерой, а оси. качания рычагов проходят через центры тяжести сечений корпуса в плоскостях базовых упоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ НОМИНАЛЬНО КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2158895C1 |
| Устройство для контроля расстояния между пазами детали | 1989 |
|
SU1717938A1 |
| Устройство для измерения несоосности отверстий | 1976 |
|
SU630518A1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2004 |
|
RU2275588C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2004 |
|
RU2279631C2 |
| Оправка переналаживаемая для контроля отверстий | 1990 |
|
SU1763865A1 |
| ПОЛУАВТОМАТ ДЛЯ ОШИПОВКИ ШИН, УСТРОЙСТВО ДЛЯ УСТАНОВКИ ШИПОВ, ГОЛОВКА ДЛЯ ЭТОГО УСТРОЙСТВА И СПОСОБ ОШИПОВКИ ШИН | 1998 |
|
RU2138403C1 |
| Устройство для измерения геометрических параметров изделий типа трубы | 1987 |
|
SU1551957A1 |
| Переменная коаксиальная нагрузка | 1989 |
|
SU1734145A1 |
| УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ ИЗ ЧУРАКА ЦИЛИНДРА МАКСИМАЛЬНОГО ОБЪЕМА С МЕХАНИЗМОМ ПРИЕМА, ПОДАЧИ И УДАЛЕНИЯ, МЕХАНИЗМОМ ЗАХВАТА И КООРДИНАЦИИ С СИСТЕМОЙ ИЗМЕРЕНИЯ И МЕХАНИЗМОМ ОБРАБОТКИ С ФРЕЗОЙ И МУФТОЙ ПОДСОЕДИНЕНИЯ ЕЕ К ПРИВОДУ, ВКЛЮЧАЯ МОНТАЖНУЮ СХЕМУ УСТАНОВКИ ПРИВОДА | 2010 |
|
RU2480328C2 |