1
Предлагаемое устройство может применяться в приборостроении для замера вектора напряженности магнитного поля Земли с самолета.
В известном приборе в качестве ориентирующего устройства используется силовой гироскопический стабилизатор. Трехкомпонентный магниточувствительный блок, состоящий из трех расположенных перпендикулярно феррозондоБЫх датчиков, вынесен с платформы гидростабилизатора, повторяет ее положение относительно вертикали места с помощью механического повторителя - параллелограммного механизма.
Такое устройство имеет ряд существенных недостатков.
С целью повышения точности пространственной стабилизации в предлагаемом трехкомпонентном авиационном магнитометре магниточувствительный блок расположен в специальном немагнитном кардановом подвесе, не имеющем механической связи с ориентирующим устройством. Магниточувствительный блок повторяет положение платформы ориентирующего устройства с помощью трехканальной системы стабилизации.
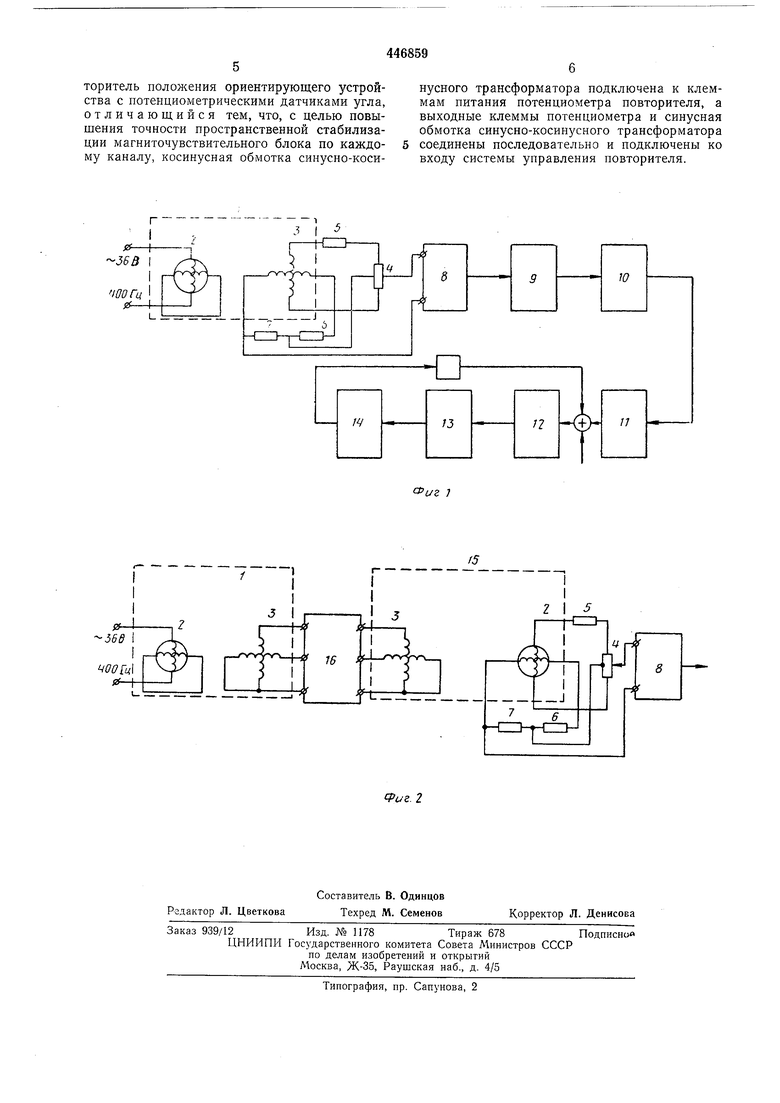
На фиг. 1 приведена принципиальная электрическая схема одного канала системы стабилизации; на фиг. 2 - принципиальная электрическая схема стыковки ориентирующего устройства и повторителя.
Приняты следующие обозначения: синуснокосинусный трансформатор 1 (датчик положеПИЯ ориентирующего устройства); ротор СКТ 2, статор СКТ 3, потенциометр 4 (датчик положения платформы повторителя), резисторы 5-7, предварительный усилитель 8, демодулятор 9, фильтр 10, модулятор 11, усилитель
мощности 12, двигатель 13, тахогенератор 14, синусно-косинусный трансформатор 15 (приемник, работающий в заторможенном режиме), усилитель развязки датчика (два канала) 16.
Трехкомпонентный магнитометр построен следующим образом. Магниточувствительный блок (МЧБ) из трех расположенных ортогонально феррозондовых датчиков размещен в
трехосном кардановом подвесе. МЧБ повторяет положение платформы ориентирующего устройства (например, курсовертикали или инерциальной платформы) с помощью трехканальной системы пространственной стабилизацни. Во избежание магнитных помех карданов подвес и привод системы стабилизации выполнены немагнитными, а единственные элементы с железом - двигатели привода - вынесены от МЧБ на значительное расстояние
(до 1-2 м, в зависимости от требований) с
помощью специальной конструкции кинематических передач привода.
Основная трудность при построении системы стабилизации состоит в том, что подавляющее большинство современных высокоточных ориентирующих устройств имеют в качестве выходных датчиков положения синуснокосинусные вращающиеся трансформаторы. В то же время датчиками положения платформы повторителя, на которой расположен МЧБ, наиболее целесообразно выбирать потенциометры в связи с требованиями минимального магнитного влияния на МЧБ. Трудность состоит в состыковке указанных датчиков (обеспечивающей высокоточную передачу угла) и вызвана тем, что потенциометр является преобразователем угла поворота в напряжение, а СКТ - точным преобразователем угла поворота платформы (и ротора СКТ) в угол поворота магнитного поля обмоток статора и грубым преобразователем в напряжение синусной обмотки статора. Последнее обстоятельство вызвано нестабильностью питания СКТ (в ориентирующих устройствах СКТ обычно питаются от бортсети самолета), нестабильностью коэффициента трансформации СКТ, вызванной нестабильностью окружающей температуры, старением и прочими причинами.
Состыковка потенциометра и СКТ в настоящей системе стабилизации осуществляется следующим образом.
Питание потенциометра 4 производится от косинусной обмотки статора 3 синусно-косинусного трансформатора 1 (резистор 5 включен для согласования нагрузки). Напряжение синусной обмотки после приведения крутизны на делителе сравнивается с выходным напряжением потенциометра. Разница указанных напряжений подается на предварительный усилитель 8 и далее - в тракт канала. Такая схема состыковки обеспечивает практическую независимость статической точности повторителя от напряжения питания, температуры в связи с тем, что указанные параметры влияют одинаково на оба сравниваемых сигнала. Это обстоятельство гарантирует высокую точность сравнения.
После усиления на предварительном усилителе сигнал, пропорциональный разности углов поворота платформы ориентирующего устройства и платформы повторителя, проходит систему: демодулятор 9 - фильтр 10 - модулятор И, где выделяется квадратурная составляющая. Далее он подается на усилитель мощности 12 и двигатель 13 для обработки в согласованное положение. Устойчивость и необходимые динамические качества системы стабилизации достигаются введением отрицательной обратной связи по скорости через тахогенератор 14. Погрешности от обкатки на качке компенсируется введением на вход усилителя мощности 12 управления по скорости качки.
В некоторых ориентирующих устройствах в целях уменьшения числа подвижных токосъемных контактов выходной сигнал синуснокосинусного трансформатора 1 выдается по трехпроводной схеме. В этом случае схема состыковки усложняется введением дополнительного синусно-косинусного трансформатора 1 в заторможенном режиме и усилителя развязки 16 (в некоторых случаях усилителя не
требуется).
С помощью ориентирующего устройства и повторителя МЧБ занимает во время полета неизменное положение. Три датчика МЧБ замеряют северную, восточную и вертикальную
составляющие вектора напряженности магнитного поля Земли. Выходные сигналы МЧБ преобразуются синхронно с измерением в цифровой код и записываются на магнитную ленту для обработки полученной информации на
ЭЦВМ.
Расположение МЧБ на платформе немагнитного повторителя и рассмотренная схема системы стабилизации устраняют указанные недостатки прототипа и позволяют:
1) практически исключить влияние на магнитометр постоянных возмущающих магнитных полей, расположив МЧБ в любом месте на самолете или вне самолета на выносной гондоле, на любом расстоянии от ориентирующего устройства;
2) исключить влияние на ориентирующее устройство массы МЧБ, расположить ориентирующее устройство в центре тяжести самолета - месте наименьших возмущений;
3) использовать серийные высокоточные ориентирующие устройства (в частности, инерциальные системы, позволяющие рещать одновременно некоторые вопросы навигации и привязки) и заменять их в процессе выработки гарантийного срока и разработки новых, более точных;
4) добиться высокой точности повторения магнитно-чувствительным блоком положения платформы ориентирующего устройства.
Испытания устройства подтвердили выводы. Положение платформы МЧБ относительно платформы ориентирующего устройства изменяется на величину не более 0,5 угл. мин при изменении напряжения питания 36 в 400 Гц
от 30 до 42 В (что превышает колебания напряжения в бортсети) и при изменении окружающей температуры от + 10 до -f 50°С. Линейность повторителя зависит в основном от ступенчатости применяемого потенциометра.
МЧБ располагается в гондоле на киле самолета АН-2, где магнитное влияние ориентирующего устройства и оборудования самолета не превышало 2 гамм.
Предмет изобретения
Магнитометр, содержащий трехкомпонентный магниточувствительный блок, ориентирующее устройство с выходом на синусно-коси65 нусных вращающихся трансформаторах и новторитель положения ориентирующего устройства с потеыциометрическими датчиками угла, отличающийся тем, что, с целью повышения точности пространственной стабилизации магниточувствительного блока по каждому каналу, косинусная обмотка синусно-косинусного трансформатора подключена к клеммам питания потенциометра повторителя, а выходные клеммы потенциометра и синусная обмотка синусно-косинусного трансформатора соединены последовательно и подключены ко входу системы управления повторителя.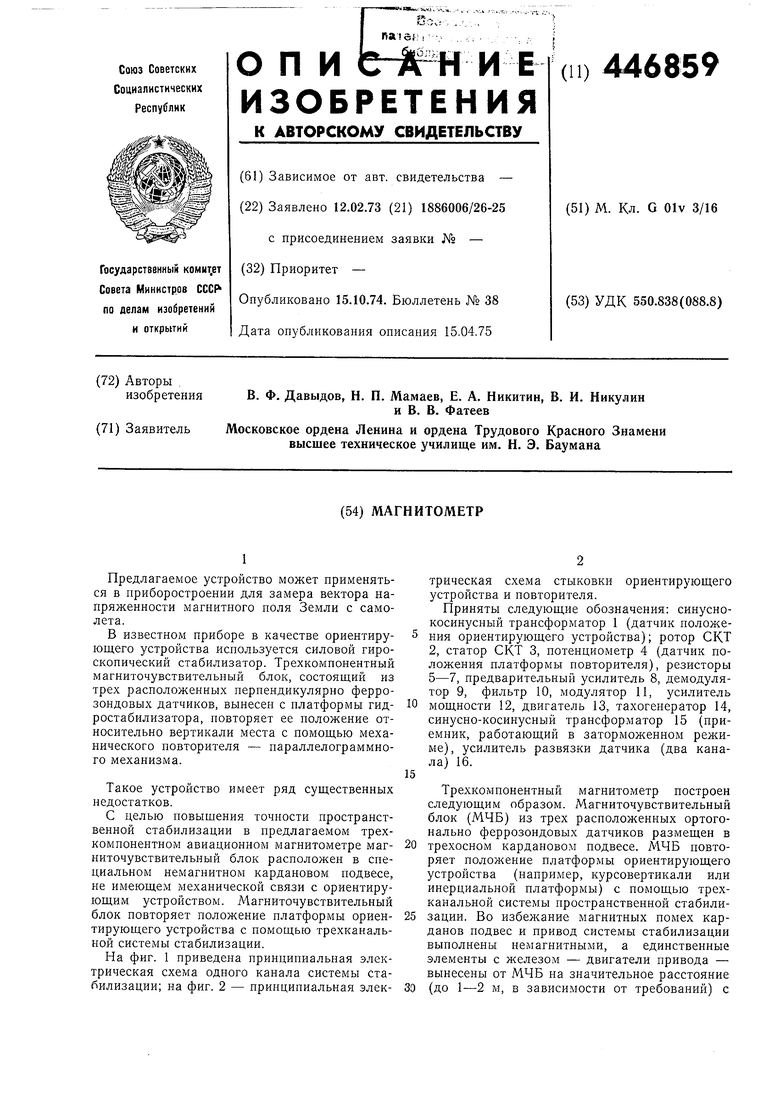
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЙУСНО-КОСИНУСМЬШ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU316110A1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ РЕЖИМА РАБОТЫ РОТОРНОГО | 1966 |
|
SU184534A1 |
| Следящая система | 1978 |
|
SU771616A1 |
| Устройство для контроля подшипников | 1987 |
|
SU1430786A1 |
| Устройство для воспроизведения экстремальных характеристик | 1976 |
|
SU611220A1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| Устройство для контроля подшипников электродвигателя | 1985 |
|
SU1276943A1 |
| Устройство для контроля дистанционной передачи угла поворота вала | 1983 |
|
SU1098020A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |