Устройство относится к подшипниковой промышленности и может быть преимущественноиспользовано для контроля подшипников собранных синхронных гистерезисных электрических двигателей.
Целью изобретения является повьште- ние точности контроля собственных синхронных электрических двигателей.
На чертеже изображена схема устройства.
Устройство содержит последовательно соединенные двигатель 1, датчик 2 положения и регистратор 3, а также фазочувствительный выпрямитель 4, выход которого соединен с вторым входом регистратора 3, первьй 5 и второй 6 синусно-косинусные трансформаторы (СКТ)., роторы которых соеди нены друг с другом и с вторым выходом датчика положения, источник 7 напряжения, выход которого подключен к синусной обмотке ротора первого СКТ 5 и к первым входам последовательно coe диненных соответственно первого 8 и второго 9 блоков перемножения и первого 10 и второго 11 преобразователя напряжения в ток, выходы которых подключены к первой и второй фазам проверяемого синхронного двигателя 12 и через конденсаторы 13 и 14 соответственно к синусной и косинусной обмоткам статора второго СКТ 6.
Синусная и косинусная обмотки пер- вого СКТ 5 подключены к вторым вхо- дам соответственно первого 8 и второго 9 блоков перемножения, а синусная и косинусная обмотки ротора второго СКТ 6 - соответственно к первому, и второму входам фазочувствительного выпрямителя 4.
Устройство работает следующим образом.
Переменное напряжение U „ sin W t поступает от источника 7 напряжения на синусную роторную обмотку СКТ 5 и формирует в роторе СКТ переменный магнитный поток, жестко связанный с ротором. Этот поток индуцирует в си- нусно-косинусных обмотках статора СКТ напряжения L и Г соответственно:
11 U.sino(- sin со t-,
U-2 Ujn COS o(- sin tU t.
Эти напряжения поступают на вторые входы соответственно первого 8 и второго 9 блоков перемножения,на перQ
оj5 ,,. .
0
5
вые входы которых подается напряжение и sinwt от источника 7 напряжения. На выходах первого и второго блоков перемножения появляются соответственно напряжения:
и, U| -sincK sin u) t .К sino( + К X cos2(t;
U a. t К cos + К coax x X cos2uJ t,
представляющие собой сумму двух составляющих - постоянной (к sine/ или К cosol}, зависящей от углового положения ротора, и переменной (к sine/- cos2 o t или К cos /cosZcot) амплитуда которой зависит от углового положения ротора СКТо , а частота соответствует удвоенной частоте напряжения питания ротора СКТ 5. После преобразования этих напряжений в ток блоками 10 и 11 с большим выходным сопротивлением сигналы поступают в две обмотки проверяемого двухфазного гистерезисного двигателя 12 и формируют в статоре этого двигателя пульсирующий магнитньй поток, вектор которого электрически параллелен потоку в синусной обмотке ротора СКТ 5. Этот поток имеет постоянную составляющую Ф и переменную составляющую с двойной частотой 2с() . Предварительно намагниченный роТор испытуемого двигателя 12, взаимодействуя с постоянной составляющей потока статора, стремится совместить линию своих полюсов с потоком Ф с точностью л , зависящей от момента сопротивления на оси ротора испытуемого двигателя.
Переменная составляющая потока изменяет сопротивление магнитной цепи статора и поток ротора испытуемого двигателя 1 2 с частотой 2w , индуктируя в обмотках статора ЭДС с частотой 2W и амплитудой, зависящей от углового положения линии полюсов ротора. Так как выходное сопротивление преобразователей,10 и 11 велико, а реактивное сопротивление конденсаторов на этой частоте мало, то возникшая ЭДС вызьшает протекание переменного тока в обмотках статора второго СКТ 6 и появление в статоре СКТ переменного магнитного потока с частотой 2w , электрически параллельного магнитной оси ротора испытуемого двигателя .
Этот магнитный поток наводит в косинусной обмотке ротора СКТ 6 переменное напряжение, пропорциональное синусу угла отстаивания ротора испытуемого двигателя 12 от синхронизирующего магнитного потока, т.е. пропорциональное моменту сопротивления на оси ротора испытуемого двигателя, а в синусной обмотке СКТ 6 переменное напряжение пропорциональное косинусу угла отставания, т.е. практически постоянное.
Напряжение с косинусной обмотки
СКТ 6 через фазочувствительный вьшря- 15 рым синусно-косинусным трансформатои регистратор, фазочувствительный выпрямитель, выход которого соединен с вторым входом регистратора, источник напряжения и первый синусно-коси- нусный трансформатор, синусная обмотка которого подключена к в ыходу источника напряжения, причем второй выход датчика положения соединен с ротором первого синусно-косинусного трансформатора, отличающееся тем, что, с целью повьшения точности оценки качества подшипников в собранных электродвигателях, оно снабжено вто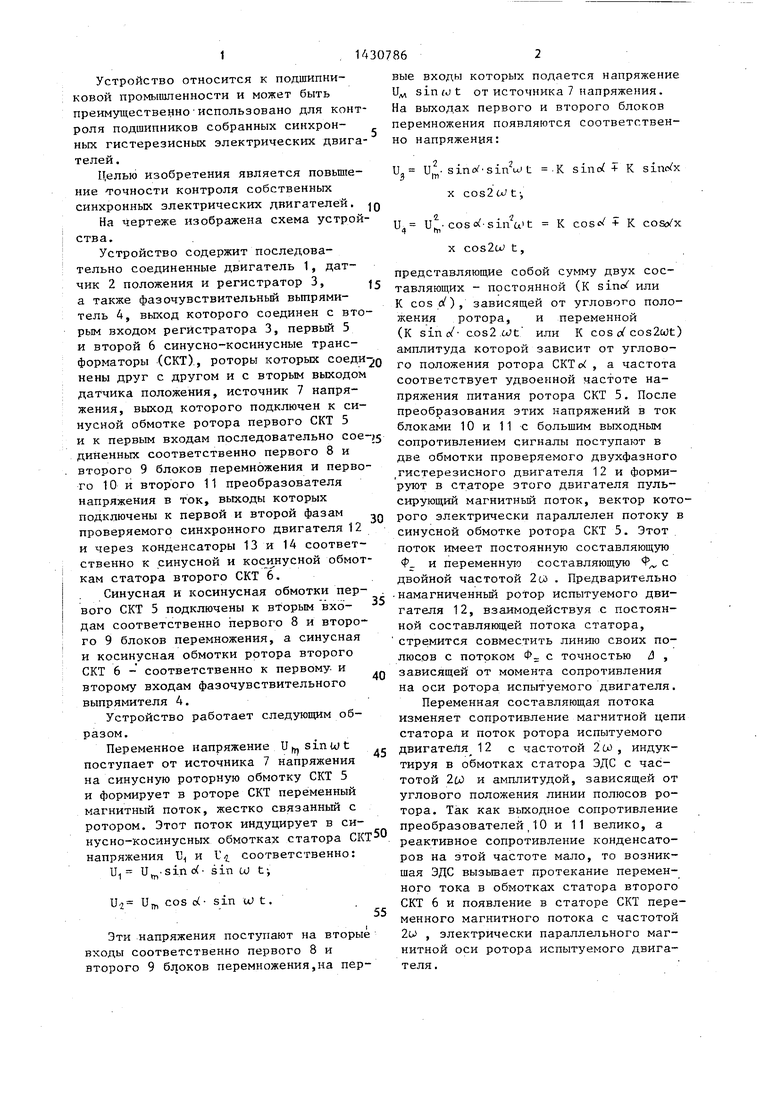
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля подшипников электродвигателя | 1985 |
|
SU1276943A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1345292A1 |
| СИЙУСНО-КОСИНУСМЬШ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU316110A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Моментный вентильный электродвигатель | 1984 |
|
SU1171916A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
Изобретение относится к области машиностроения, в частности к устройствам для контроля подшипников, и МО-- жет быть использовано преимущественно для контроля подшипников собранных синхронных гистерезисных электрических двигателей. Цель изобретения - поГ г:а вышение .точности оценки качества подшипников в собранных электродвигателях. Поставленная цель достигается тем, что переменное напряжение, создаваемое источником напряжения 7,си- нусно-косинусным трансформатором (СКТ) 5, блоками перемножений 8,9, преобразователями 10,11, поступает на две обмотки испытуемого двигателя 12, создавая в них ЭДС с удвоенной частотой питания. Эта ЭДС в свою очередь создает напряжение в роторе , СКТ 6, пропорциональное моменту сопротивления вращения подшипников двига- теля 12. При вращении двигателем 1 с датчиком положения 2 роторов СКТ5,6§ на двухкоординатном самописце 3 получают зависимость момента от угла поворота подшипников. 1 ил. (Л с 4 со о 00 ОЭ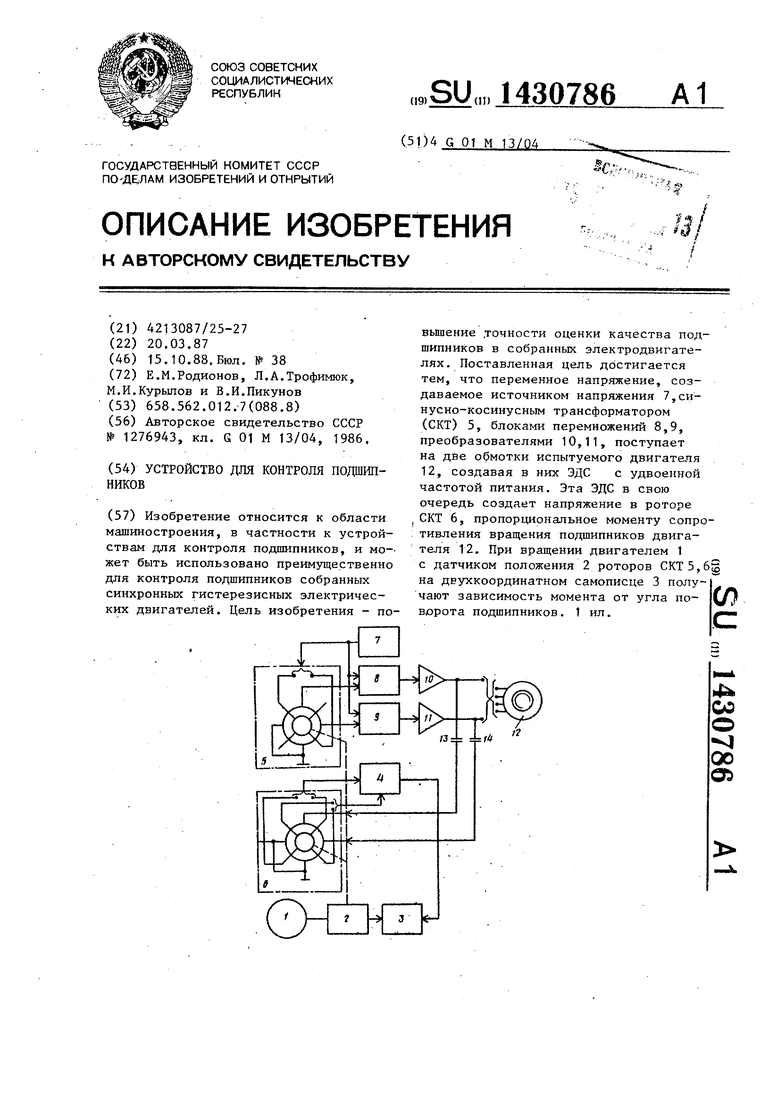
митель 4, опорным напряжением которого является напряжение с синусной обмотки СКТ 6, поступает на двухкоор динатньй регистратор 3.
Вращая двигателем 1 датчик 2 поло- жейия, роторы СКТ 5 и 6, а следовательно, ротор испытуемого электрического двигателя 12, и регистрируя напряжение на косинусной обмотке ротора второго СКТ 6, получают моментную характеристику подшипника в виде функции от угла поворота ротора испытуемого электродвигателя, для чего на вход регистратора 3 подают напряжение с потенциометра датчика 2 положения.
Формула изобретения Устройство для контроля подшипников, содержащее последовательно соединенные двигатель, датчик положения
ром, и последовательно соединенным соответственно первыми и вторыми блоками перемножения и преобразователями напряжения в ток, выходы которых через конденсаторы соединены соответственно с синусной и косинусной обмотками статора второго синусно-косинусного трансформатора, при этом выход источника напряжения подключен к первым входам перв.ого и второго блоков перемножения, к вторым входам которых подключены синусная и косинусная обмотки статора первого синусно- косинусного трансформатора,первьй и второй входы фазочувствительного выпрямителя подключены к синусной и косинусной обмоткам ротора второго синусно-косинусного трансформатора, а сам ротор соединен с вторым выходом положения.
| Устройство для контроля подшипников электродвигателя | 1985 |
|
SU1276943A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
