1
Изобретение относится к сельсинным следящим системам с двухотсчетным датчиком положения. При применении в сельсинной следящей системе двухотсчетного датчика положения, с целью исключения ложного нуля или зоны нечувствительности, необходимо выдержать условие совпадения полярности выходных сигналов каналов грубого и точного отсчета при подходе системы к нулю в процессе отработки заданного положения.
Невыполнение этого условия приводит к большим погрешностям в отработке заданных перемещений объекта управления.
Известны сельсинные следящие системы с двухотсчетным датчиком положения, где это условие выполняется один раз при наладке системы путем соответствующей настройки нулевых положений сельсинов грубого и точного отсчета.
Однако при применении таких систем в механизмах, где требуются частые технологические перестройки начала отсчета (например, в нажимных устройствах прокатных станов при перевалке), настройка совпадения полярности выходных сигналов грубого и точного отсчетов требует установки специальных приборов, значительных затрат времени, а также специальной подготовки обслуживающего персонала.
В предложенной следян,ей системе совпадение полярности выходных сигналов каналов грубого и точного отсчетов поддерживается автоматически при любых перестройках начала отсчета.
Автоматическое поддержание совпадения полярности выходных сигналов каналов грубого и точного отсчетов осуществляется путем включения в канал точного отсчета инвертора, шунтируемого ключом, который управляется логической схемой равнозначности с элементами распознавания полярности выходных сигналов каналов.
Таким образом, при перестройке начала отсчета датчика пути достаточно выставить нулевые положения сельсинных пар грубого и точного отсчета, логическая схема равнозначности включая (при несовпадении полярности) и выключая (при совпадении полярности) с помощью ключа инвертор в канале точпого отсчета, автоматически будет поддерживать совпадение полярности выходных сигналов каналов, поступающих на синхронизирующее устройство. При подходе системы к заданному положению в процессе обработки перемещения выходные сигналы каналов грубого и точного отсчета снижаются по величине настолько, что могут стать ниже порога чувствительности элементов из которых настроена схема равнозначности.
С целью исключения потери управления системой при подходе к заданному положению введена логическая схема памяти, запоминающая последнее правильное состояние системы при снижении выходного сигнала канала грубого отсчета ниже порога чувствительности элементов и удерживающая систему в этом состоянии все время пока выходной сигпал канала грубого отсчета не станет выще порога чувствительности элементов.
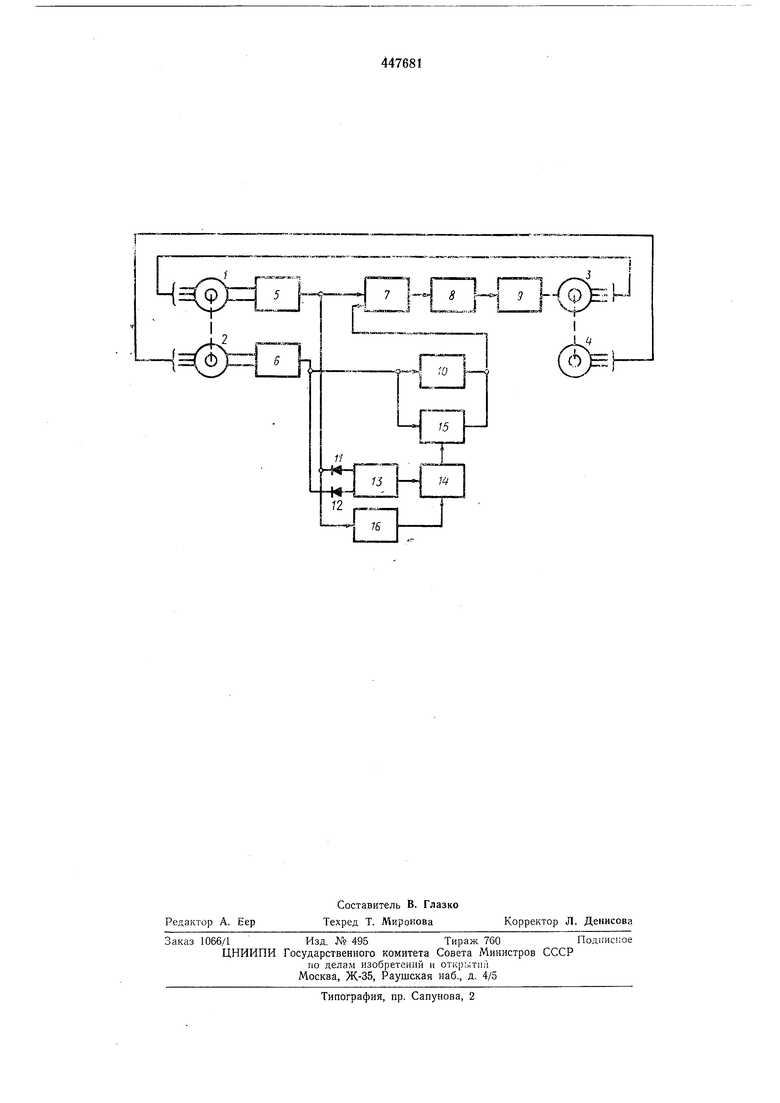
Блок-схема предлагаемой следящей системы приведена на чертеже, где приняты следующие обозначения: 1 и 2 - сельсины-задатчики положения соответственно грубого и точного отсчетов; 3 и 4 - сельсины-датчики положения соответственно грубого и точного отсчетов; 5 и 6 - фазочувствительные выпрямители, соответственно грубого и точного отсчетов; 7 - синхронизирующее устройство; 8 - усилитель; 9 - исполнительный привод; 10 - инвертор; 11 и 12 - элементы распознавания знаков; 13 - логическая схема равнозначности; 14 - логическая схема памяти; 15 - ключ; 16 - пороговый элемент.
Схема построена следующим образом.
Входной сигнал, пропорциональный рассогласованию сельсинов грубого отсчета 1 и 3 и точного отсчета 2 и 4, поступает на соответствующий фазочувствительный выпрямитель 5 и 6, служащий для преобразования переменного сигнала в постоянный, полярность которого соответствует направлению рассогласования сельсинов.
С фазочувствительного выпрямителя 5 грубого отсчета через синхронизирующее устройство 7 и усилитель 8 сигнал поступает на исполнительный привод 9. С фазочувствительного выпрямителя 6 точного отсчета сигнал поступает на синхронизирующее устройство 7 через инвертор 10, служащий для согласования полярности сигналов каналов грубого и точного отсчетов.
На выходы элементов 5 и 6 через элементы распознавания знаков 11 и 12 включена логическая схема равнозначности 13, служащая для определения соответствия знаков каналов грубого и точного отсчетов. К выходу схемы равнозначности через логическую схему памяти 14 подключен ключ 15, который управляет работой инвертора 10. К выходу элемента 5 подсоединен пороговый элемент 16, который служит для включения памяти элемента 14, когда сигнал элемента 5 становится малым.
Схема работает следующим образом.
Сигналы переменного напряжения, появившиеся на выходах сельсинов 1 и 3 командоаппарата в результате их рассогласования с сельсинами 2 и 4, связанными с механизмом, преобразуются фазочувствительными выпрямителями 5 и 6 в сигналы постоянного тока, которые в конечном итоге приводят к перемещению исполнительного привода. При этом выходной сигнал канала грубого отсчета
уменьшается, а точного отсчета изменяется синусоидально.
Инвертор 10, включенный между элементами 6 и 7, позволяет менять полярность выходного сигнала элемента 6. Осуществляется это с помощью ключа 15. С помощью элементов распознавания знаков И и 12 (диоды) логическая схема равнозначности 13 определяет момент, когда знаки выходных сигналов
элементов 5 и 6 становятся одинаковыми, и подает сигнал на замыкание ключа 15, который своими замыкающимися контактами шунтирует инвертор и сигнал элемента 6 поступает непосредственно на синхронизирующее
устройство 7. Когда знаки сигналов на выходе элементов 5 и 6 разные, логическая схема равнозначности подает сигнал на отключение реле 15 и на выход элемента 6 включается инвертор 10. Таким образом, сигналы на выходе
синхронизирующего устройства 7 всегда остаются одной полярности. При снижении напряжения на входе логической схемы равнозначности ниже порога чувствительности элементов выходной сигнал элемента 13 запоминается логической схемой памяти 14. Пороговый элемент 14, включенный на выход элемента 5, определяет момент включения памяти при подходе системы к полной отработки задания. Сигналы каналов грубого и точного отсчета
до этого были одинаковы, что определялось предыдущей работой схемы, следовательно и при дальнейщем снижении сигнала рассогласования ложного переключения инвертора 10 не произойдет.
Предмет изобретения
Следящая система, содержащая последовательно соединенные синхронизирующее устройство, усилитель и привод, каналы грубого и точного отсчетов, каждый из которых состоит из последовательно соединенных установленного на валу привода сельсина - датчика, сельсина - задатчика и фазочувствительного выпрямителя, выход фазочувствительного выпрямителя грубого канала подключен к первому входу синхронизирующего устройства, отличающаяся тем, что, с целью повышения точности системы при технологических перестройках начала отсчета, она содержит схему памяти, пороговый элемент, ключ, инвертор, схему равнозначности с элементами распознавания знаков, первый и второй входы которой подключены соответственно к выходам фазочувствительпых выпрямителей точного и грубого каналов, а выход - к первому входу схемы памяти, соединенной своим выходом с управляющим входом ключа, а вторым входом через пороговый элемент с выходом фазочувствительного усилителя грубого канала, причем вход и выход инвертора подключены соответственно к выходу фазочувствительного усилителя точного канала и второму входу синхронизирующего устройства
и соединены между собой через ключ.
xraaai:af :f t..r i f a imtsat
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU903803A2 |
| Следящая система | 1978 |
|
SU744435A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Следящий электропривод для разметки шкал | 1984 |
|
SU1228071A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU312237A1 |
| Двухотсчетный электромеханический преобразователь углового положения вала в цифровой код | 1977 |
|
SU670953A2 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Система автоматического управления двигателем главного привода стана холодной прокатки труб | 1984 |
|
SU1205953A1 |
| Двухотсчетный электромеханический преобразователь углового положения вала в цифровой код | 1975 |
|
SU585515A1 |