1
Изобретение относится к автоматике, а именно к следящим системам, имеющим каналы бото и точного отсчета, и может быть использовано при создании, например, механизмов приемно-передающих антенн.
Известна следящая система, содержащая датчики грубого и точного отсчета, входы которых соединены с источником переменного напряжения, а входы - соответственно со входами приемников грубого и точного отсчета, причем оси датчиков грубого и точного отсчета соединены между собой через первый редуктор, а оси приемников грубого .и точного отсчета - через второй редуктор, фазочувствительный выпрямитель, выходы которого подключены к .входам усилителей, выходы которых подключены к двигателю, ось которого механически соединена с первым редуктором 1.-Известна также следящая система, содержащая каналы грубого и точного отсчета, состоящие из датчиков и приемников, выполненных . на вращающихся трансформаторах, статорные обмотки вращающихся трансформаторов подключены к источнику прямоугольного напряжения.
роторы датчика и приемника канала грубого отсчёта механически соединены, соответственно, через первый и второй редукторы с роторами датчика и приемника канала точного отсчета, выходная обмотка вращающегося трансформатора канала точного отсчета подключена ко входу схемы сравнения, выход которой соединен с цепью управления двигателя, вал которого механически соединен со вторым редуктором и синхронизирующее устройство, выполненное
10 в виде фильтра, вход которого подключен к выходной обмотке вращающегося трансформатора канала грубого отсчета 12.
Наиболее близким по техническому рещению к предлагаемому является следящая система,
15 содержащая соединенные через редуктор сельсиндатчики грубого и точного отсчета, однофазные обмотки котбрых подключены к источнику переменного напряжения, трехфазные обмотки к трехфазным обмоткам соответствующих сель20син-приемников грубого и точного отсчета, соединенных вторым редуктором, вход которого кинематически связан с выходным валом двигателя, выход которого соединен с выходом усилителя МОЩНОСТИ, селектор сигналов грубого и точного отсчета, соответствующие входы которого соединены с однофазными обмотками сельсинприемников грубого и точного отсчета, а выход - со входом фазочувствительного выпрямителя 3
Известная следящая система широко применяется для управления различными механизмами. Однако для управления механизмами приемнопередающих и излучающих антенн, в частности для пространственного управления оптическим лучом с помощью отражающего зеркала, одним из основньк режимов работы является режим возвратно-вращательного сканирования в заданном секторе в функции угла задания.
Недостаток известных следя1Щ1х систем заключается в том, что они обеспечивают только следящий режим работы, когда задание на отработку требуемых углов поворота выдается оператором.
Цель изобретения - расширение функциональных возможностей следящей системы путём введения режима возвратно-вращательного сканирования в заданном секторе в функции угла задания.-.
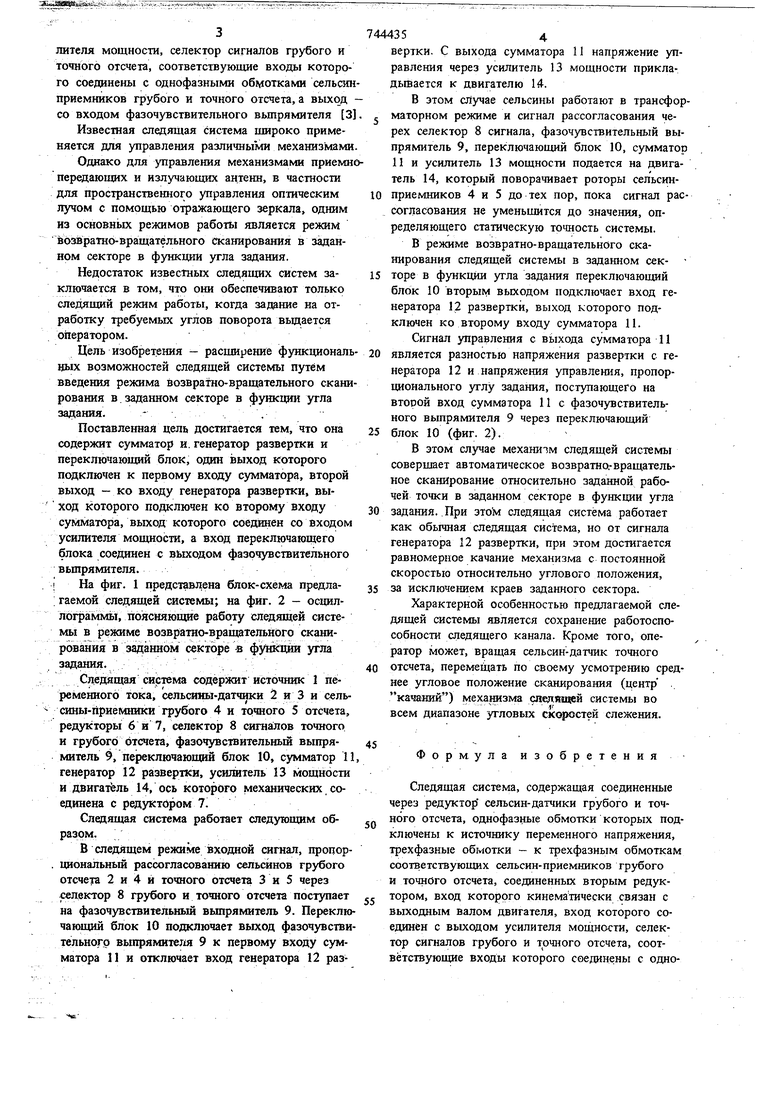
Поставленная цель достигается тем, что она содержит сумматор и. генератор развертки и переключающий блок, один 1выход которого подключен к первому входу сумматора, второй выход - ко входу генератора развертки, выход которого подключен ко второму входу сумматора, выход которого соединен со входом усилителя мощности, а вход переключающего блока соединен с выходом фазочувствительного вьшрямителя.
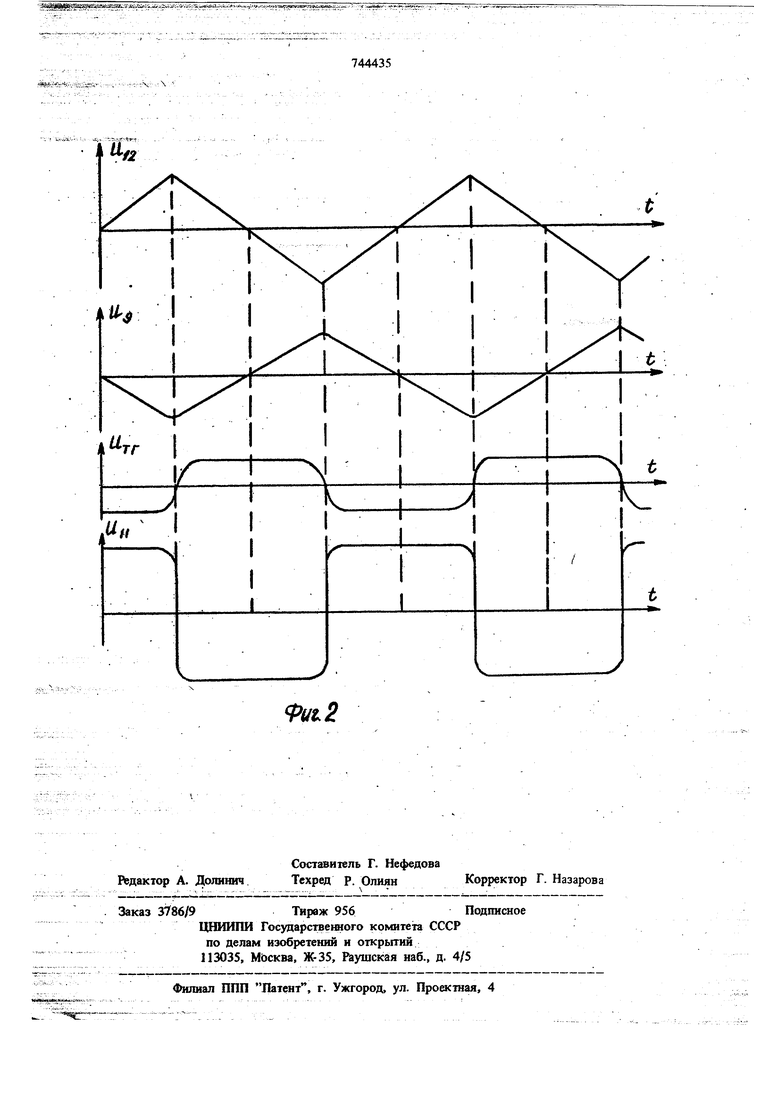
I На фиг. 1 представлена блок-схема предлагаемой следящей системы; на фиг. 2 - осциллограммьг, поясняющие работу следящей системы в режиме возвратно-вращательного сканирования в заданном секторе -в футосции угла задания.
Сдедящая система содержит источник 1 переменного тока, сельсины-датчики 1 и 3 и сельсины-приемники грубого 4 и точного 5 отсчета, редукторы 6 и 7, селектор 8 сигналов точного и грубого отсчета, фазочувствительный выпрямитель 9, переключающий блок 10, сумматор 11 генератор 12 развертки, усилитель 13 мощности и двигатель 14, ось которого механических соединена с редуктором 7.
Следящая система работает следующим образом.
В следящем режиме входной сигнал, процор. ционапьный рассогласованию сельсинов грубого отсчета 2 и 4 и точного отсчета 3 и 5 через :€Л ектор 8 грубого и точного отсчета поступает на фазочувствительный выпрямитель 9. Переключающий блок 10 подключает выход фазочувствительного вьшрямитехш 9 к первому входу сумматора 11 и отключает вход генератора 12 раз354
вертки. С выхода сумматора 11 напряжение управления через усилитель 13 мощности прикладьЕЙается к двигателю 14.
В этом сЛзчае сельсины работают в трансформаторном режиме и сигнал рассогласования черех селектор 8 сигнала, фазочувствительный выпрямитель 9, переключающий блок 10, сумматор II и усилитель 13 мощности подается на двигатель 14, который поворачивает роторы сельсинприемников 4 и 5 до тех пор, пока сигнал рассогласования не уменьшится до значения, определяющего статическую точность системы. В режиме возвратно-вращательного сканирования следящей системы в заданном секторе в функции угла задания переключающий блок 10 вторым вькодом подключает вход генератора 12 развертки, выход которого подключен ко второму входу сумматора И. Сигнал управления с выхода сумматора 11
является разностью напряжения развертки с генератора 12 и напряжения управления, пропорционального углу задания, поступающего на второй вход сумматора 11 с фазочувствительного выпрямителя 9 через переключающий
блок 10 (фиг. 2).
В этом случае механи1м следящей системы совершает автоматическое возвратно.-вращательное сканирование относительно заданной рабочей точки в заданном секторе в функции угла
задания. .При этом следящая система работает как обычная следящая система, но от сигнала генератора 12 развертки, при этом достигается равномерное качание механизма с постоянной скоростью относительно углового положения,
за исключением краев заданного сектора.
Характерной особенностью предлагаемой следящей системы является сохранение работоспособности следящего канала. Кроме того, оператор может, вращая сельсин-датчик точного
отсчета, перемей|ать по своему усмотрению среднее угловое положение сканирования (центр . качаний) механизма следящей системы во всем диапазоне угловых скоростей слежения.
Формула изобретения
Следящая система, содержащая соединенные через редуктор сельсин-датчики грубого и точного отсчета, однофазные обмотки которых подключены к источнику переменного напряжения, трехфазные обмотки - к трехфазным обмоткам соогветствующих сельсин-приемников грубого и точного отсчета, соединенных вторым редуктором, вход которого кинематическн связан с выходным валом двигателя, вход которого соединен с выходом усилителя мощности, селектор сигналов грубого и точного отсчета, соответствующие входы которого соединены с одно57444фазными обмотками сельсин-приел4ников грубого и точного отсчета, а выход - со входом фазочувствительного выпрямителя, отличающаяся тем, что, с целью расширения функциональных возможностей следящей смете- 5 мы путем введения ре.жима возвратн вращательного сканирования в заданном секторе отнооттельно угла задания, она содержит сумматор, генератор развертки и переключающий блок, один выход которого подключен к. первомуto входу сумматора, второй выход - ко входу генератора развертки, выход которого подключен ко второму входу сумматора, выход которого соединен со входом усилителя мощности, а вход переключающего блока соединен с выходом фазочувствительного выпрямителя. Источники информации, принятые во внимание при экспертизе 1.Авторское сввдетельство СССР N 433446, кл. G се В 11/01,1972. 2.Авторское свидетельство СССР N 452804, кл. G 05 В 11/12, 1973. 3.Авторское свидетельство СССР N 447681, кл. G 05 В 11/14, 1972 (прототип).
гг у
/
ut.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU903803A2 |
| Следящая система | 1977 |
|
SU622044A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU433446A1 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| Следящая система | 1975 |
|
SU555377A1 |
| Следящая система | 1972 |
|
SU447681A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Следящая система | 1973 |
|
SU452804A1 |
| Следящее устройство | 1961 |
|
SU142170A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С КОМБИНИРОВАННЫМ ТАХОГЕНЕРАТОРОМ | 1969 |
|
SU1840137A1 |