(54) УСТЮЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОЮМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1985 |
|
SU1290251A1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
| Следящая система | 1972 |
|
SU447681A1 |
| Двухотсчетный преобразователь синусно-косинусно-модулированных сигналов переменного тока в код | 1985 |
|
SU1283969A1 |
| Устройство для регулирования расхода жидкости | 1983 |
|
SU1158979A1 |
| Устройство для регулирования расхода жидкости | 1981 |
|
SU999025A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Преобразователь перемещения в код | 1976 |
|
SU693415A1 |
Изобретение относится к робототехнике и может быть использовано при создании устройств управления дистанционными манипуляторами.
Известны устройства для управления машпулятором. Устройство, содержащее задающий и исполнительный органы с двухотсчетными следяидами системами 1.
Од11ако устройство не обеспечивает удобства работы оператору в крайних точках рабочей зоны манипулятора.
Наиболее близким техническим решением к предлагаемому является устройство, содержащее тахогенератор, связанный с первым сельсином, выход которого через последовательно соединенные первый фазочувствительный вьшрямитель, первый сумматор, усили тель и тахомост подключен ко входу двигателя,вал которого связан со вторым сельсином, образующим с первым сельсином сельсинную пару 12.
В этом устройстве расширение зоны обслуживания манипулятора, выполненного на таких следящих системах, может быть достигнуто только механическим поворотом датчиков угла на задающей стороне, что весьма неудобно для оператора. Введением же дополнительного сигнала на вход следящей системы получить рассогласование в двухотсчетных следяоцих системах без нарушения их устойчргоости практически невозможно.
Цель изобретения - улучшение зксплуатационнь1Х характеристик устройства.
Поставленная цель достигается тем, что
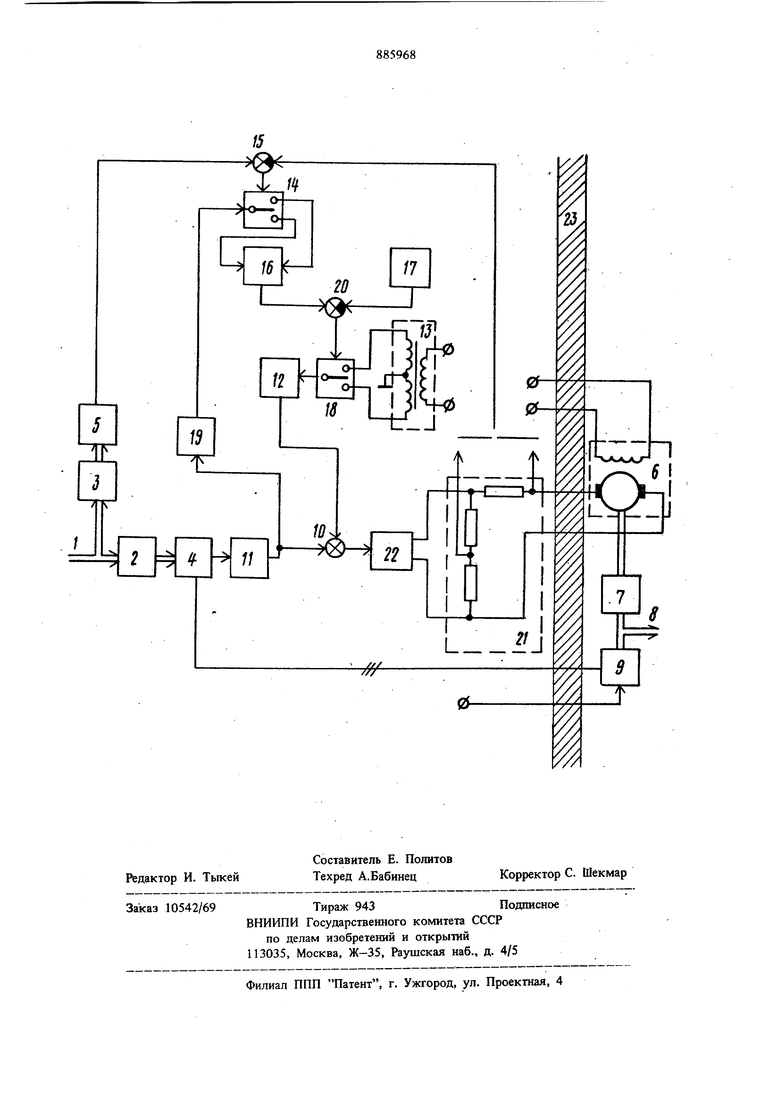
10 устройство содержит регистр памяти, источник опорного сигнала, второй сумматор и последовательно соединеннью формирователь импульсов, первый ключ, реверсивный счетчик, третий сумматор, второй ключ и второй 5 фазочувствительнь1Й вьшрямитель, выходом подключенный ко второму входу первого сумматора, первый вход которого соединен со входом формирователя импульсов, первый вход второго сумматора подключен к выЮходу тахогенератора, второй вход - к выходу тахомоста, а выход - ко второму входу первого ключа, второй выход которого соединен со вторым входом реверсивного счетчика, выход регистра памяти подключен ко второму входу третьего сумматора, а второй и третий входы второго ключа соединены соответственно с первым и вторым выходами, источника опорного сигнала. На чертеже представлена функциональная , схема устройства. Устройство содержит задающий орган 1, первый редуктор 2, второй редуктор 3, первый сельсин 4, тахогенератор 5, двигатель . 6, третий редуктор 7, исполнительный орган 8, второй сельсин 9, первый сумматор 10, первый фазочувствительный выпрямитель 11, второй фазочувствительный выпрямитель 12, источник 13 опорного сигнала, первый ключ 14, второй сумматор 15, реверсивный счетчик 16, регистр 17 памяти, второй ключ 18, формирователь 19 импульсов, третий сум матор 20, тахомост 21, усилитель 22, биологическая защита 23. Устройство работает следующим образом. В исходном состоянии, когда задающий Орган 1 и исполнительный орган 8 согласованы, в реверсивном счетчике 16 и регистре 17памяти содержатся одинаковые числа, равные 2 , где и- разрядность счетчика 16 и регистра 17. При этом второй ключ 18находится в нейтральном положении и на вход первого сумматора 10 поступает только сигнал ощибки первого и второго сельсинов 4 и 9, который отрабатывается двигателем 6 В том числе, если скорость задающего органа 1 превосходит максимальную скорость исполнительного органа 8, на вход реверсивного счетчика 16 с формирователя 19 импульсов поступает последовательность импульсов, возникающих каждый раз, когда ошибка сельсинов 4 и 9 превысит определенный уровень. При зтом число, содержащееся в реверсивном счетчике 16, будет увеличиваться или уменьшаться в зависимости от знака разности сигналов с тахогенератора 5 и тахомоста 21. Первый же импульс приведет к срабатьшанию второго ключа 18 и с источника 13 опорного сигнала через первый сумматор 10 и усилитель 22 на вход двигателя 6 поступит управляющий сигнал. Фаза управляющего сигнала изменяется при изменении знака p нocти числа в реверсивном счетчике 16 и регистре 17 памяти. Под действием зтого сигнала двигатель 6 отрабатывает рассогласование задающего и испблнительного органов 1 и 8. Схема придет в исходное состояние, когда числа, содержащиеся в счетчике 16 и регистре 17, сравгшются. 84 Однако в исходном положе1ши можно задать любое рассогласование задающего и исполнительного органов, изменив содержимое регистра 17 памяти. При этом будет рассогласовываться на величину, пропорциональную целому числу оборотов сельсина, до установления нового равенства содержимого реверсивного счетчика 16 и регистра 17 памяти. В дальнейщем исполнительный орган 8 будет следовать за задающим .органом 1 с заданным рассогласованием. Применение изобретения позволит за счет рассогласования исполнительного и задающего органов расщирить зону обслуживания манипулятора и повысить удобства работы оператору в крайних точках зоны. Формула изобретения Устройство для управления манипулятором, содержащее тахогенератор, связанный с первым сельсином, выход которого через последовательно соединенные первый фазочувствительный вьшрямитель, первый сумматор, усилитель и тахомост подключен ко входу двигателя, вал которого связан со вторым сельсином, образующим с первым сельсином сельсинную пару, отличающееся тем, что, с целью улучщения эксплуатационных характеристик устройства, оно содержит регистр памяти, источник опорного сигнала, второй сумматор и последовательно соединенные формирователь импульсов, первый ключ, реверсивный счетчик, третий сумматор, второй ключ и второй фазочувствительный выпрямитель, выходом подключенный ко второму входу первого сумматора, первый вход которого соединен со входом формирователя импульсов, первый вход второго сумматора подключен к выходу тахогенератора, второй вход - к выходу тахомоста, а выход - ко второму входу первого ключа, второй выход которого соединен со вторым входом реверсивного счетчика, выход регистра памяти подключен ко второму входу третьего сумматора, а второй и третий входы второго ключа соединены соответственно с первым и вторым выходами источника опорного сигнала. Источники информации, принятые во внимание при экспертизе 1.Авторское сввдетельство СССР № 433446, кл. G 05 В 11/01, 1975. 2.Васильев Д. В. и Филиппов Г. С. Основы теории и расчета следящих систем. М., Госэнергоиздат, 1959, с. 269 (прототип).
