2, Система автоматического управления ПОП.1, отличающая- с я тем, что блок адаптивного управления содержит датчик усилий, фильтр дискриминатор, схему логики и индикатор направления движения клети, причем вькод, датчика .усилий через последовательно соединенные фильтр и дискриминатор соединен с одним из входов схемы логикй,( другой вход кото- соедин.ен с вькодом индикатора направления дв 1женйя клети, входы
;Которого явлйкзтс.я .первым, вторьм и третьим входами блок, четвертым и пятым -входами блока являются входы датчика усилий, а выходом блока является выход схемы логики.
. Система автоматического управления поп, 1,отличающая- с я тем, что блок управления содержит два сельсина-приемника, два
фазочувствительных вьшрямителя, два усилителя, дифференцирующее звено, мультивибратор, три диода, два ре- зисторных оптрона, причем выход первого сельсина-приемника через первый фазочувствительный выпрямитель и первый и второй диоды соединен с первым и вторым входами первого
1
Изобретение относится к системам автоматического управления, а точнее к системе автоматического управления главным приводом стана холодной прокатки труб, и наиболее эффективно может быть использовано для автоматического управления главными приводами станов холодной прокатки труб.
Цель изобретения - повьппение надежности и производительности стана путем уменьшения высокочастотной упругой составляющей динамических .усилий в .шатунах и стабилизации минимальной величины амплитуды этих усилий.
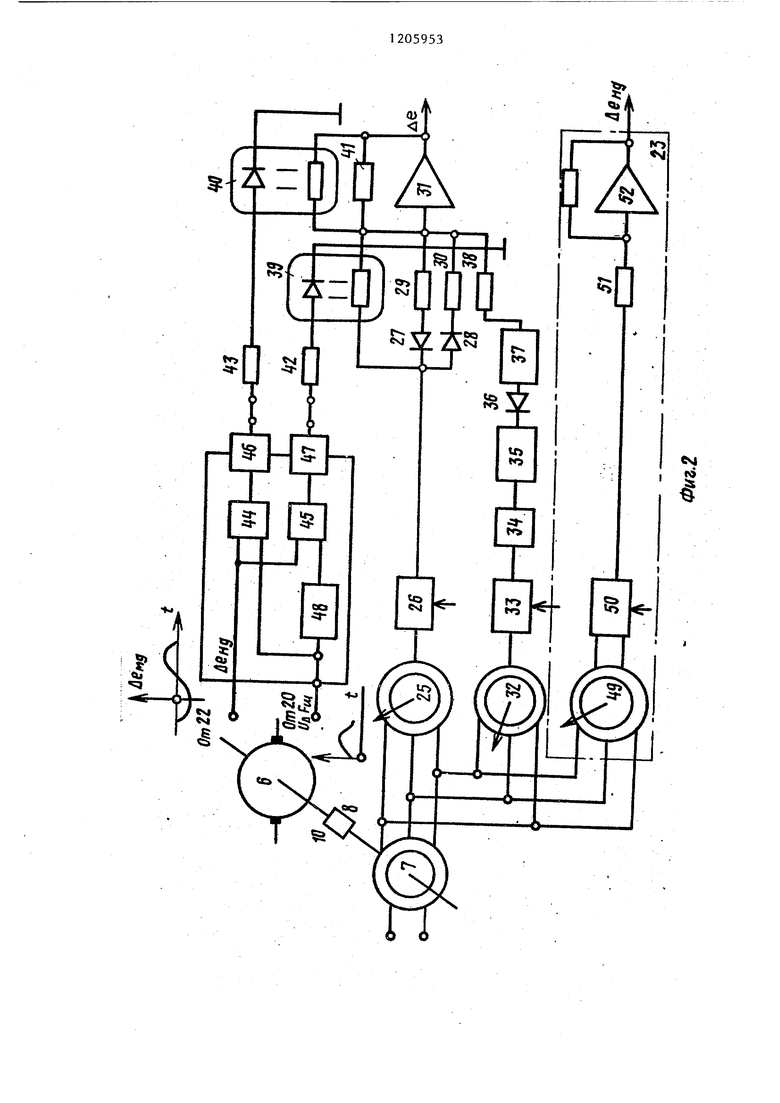
На фиг. 1 представлена структурная схема системы автоматического управления главным приводом стана холодной прокатки труб; на фиг. 2 - схема адайтивного блока программного управления, -логического блока и инусилителя, третий вход которого через мультивибратор, третий диод, дифференцирующее звено, второй усилитель и второй фазочувствительный выпрямитель соединен с выходом второго сельсина-приемника, отличающий- ся тем, что, в цепи обратной связи и первого входа первого усилителя подсоединены два резисторных оптрона, входы которых являются первым и вторым входами блока, другими ми блока являются входы ;сельсинов- приемников, а выходом блока является выход первого усилителя.
4. Система автоматического управления по п. 2, отличающая- с я тем, что схема логики содержит два ключа, два элемента И и инвертор, причем выходы элементов И соединены с входами соответствующих ключей, другие входы которых соединены с первым входом схемы, с первым входом первого элемента И и через инвертор - с первым входом второгб.элемента И, причем вторые входы элементов И являются вторым входом схемы, а выходы ключей являются ее выходами.
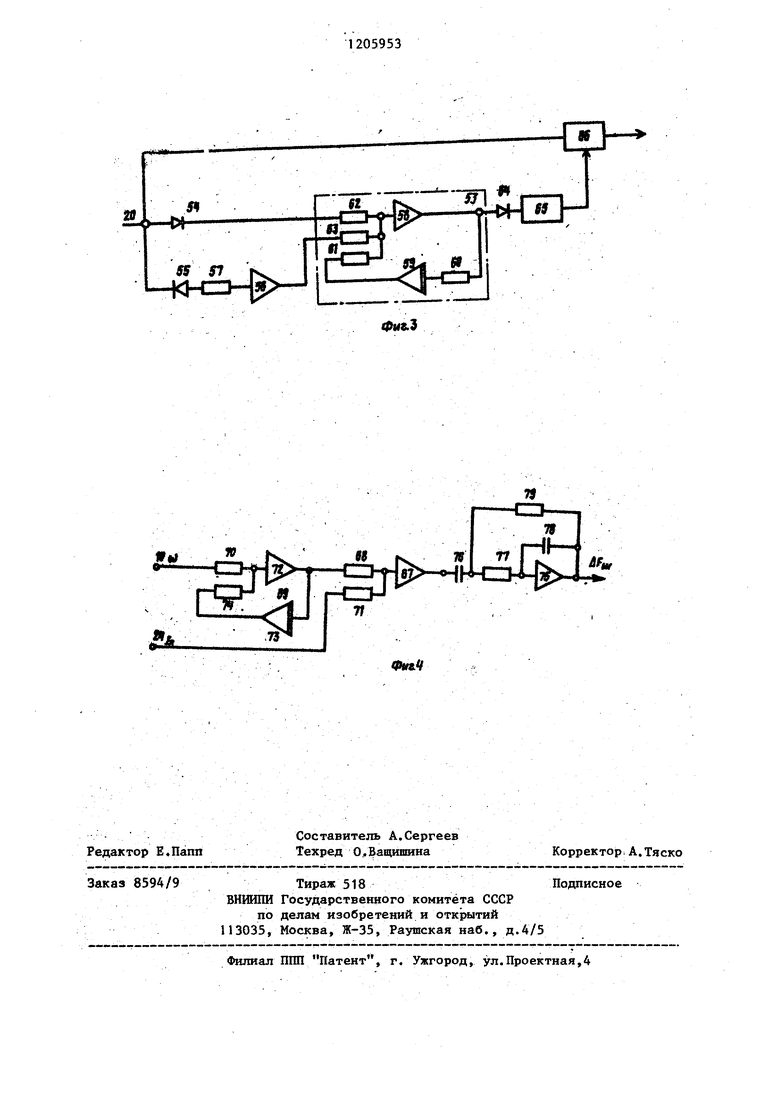
дикатора направления хода клети; на фиг. 3 - структурная схема дискриминатора знака фазы импульсного сигнала высокочастотной составляющей динамических усилий в шатунах; на фиг. 4 - схема датчика усилий в шатунах.
Система автоматического управления двигателем главного привода стана холодной прокатки труб (фиг. 1) состоит из блока 1 управления, выход которого соединен с входом устройства управления, представленным элементом 2 сравнения, выход которого соединен через усилитель 3 с преобразователем 4, подсоединенным к цепи 5 якоря двигателя 6. При этом вал сельсина-датчика 7 соединен через редуктор 8 с валом 9 датчика 10 скорости, который соединен с валом 11 двигателя 6.
Вал i1 двигателя через редуктор 12 соединен с валом 13 кривошипа 14, сочлененным через подшипник 15 и шатун 16 с клетью.17 стана .
БЛОК 8 адаптивного управления вьшолнен в виде последовательно соединенных датчика 19 усилий, филь ра 20 и дискриминатора 21, подсоединенного своим выходом на один из входов схем 22 логики, на другой вход которого подсоединен выход индикатора 23 направления движения клети. При этом входы датчика 19 усилий соединены с выходами датчиков 10 скорости и тока 24. Последний подсоединен к шунту, который включен в цепь 5 якоря двигателя 6.
Блок 1 управления (фиг. 2) содержит два канала, один из которых состоит из сельсина-датчика 7 и сельсина-приемника 25, соединенного с фазочувствительным выпрямителем 2 выход которого соединен через диоды 27 и 28 с резисторами 29 и 30 усилителя 31, а другая цепь формирует импульсную составляющую программы и состоит из пары сельсина-датчика 7 и сельсина-приемника 32 также работающей в трансформаторном режиме и .соединенной с последовательно соединенными фазочувствительньми выпрямителем 33, усилителем 34, дифференцирующим звеном 35. диодом 36, мультивибратором 37, выход которого соединен с входным резистором 38 усилителя 31, который содержит во входной цепи обратной связи резисторные оптроны 39 и 40, соединенные параллельно резисторам 29 и 41 соответственно. При этом указанные резисторные оптроны присоединены через резисторы 42 и 43 к щ,ко- дам схемь 22 лргики, которая содержит элементы И 44 и 45, имеющие по два входа, а также ключи 46 и 47. Один из указанных входов соединен с выходом индикатора 23 направления движения клети, а другой вход соединен с в{лходом дискриминатора 21 знака фазы высокочастотной составляющей динамических усилий в шатунах. При этом выход дискриминатора 2 соединен с входом логического элемета 45. совпадения через инвертор 48. Индикатор 23 направления движения клети представляет собой последовательное соединение пары сельсина- приемника 49 и сельсина-датчика 7,
205953
работающей в трансформаторном режиме, с фазочувствительным вьтрямитель- ным блоком 50, выход которого соединен с входным резистором 51 усили5 теля 52.
При этом вал сельсина-датчика 7 через кинематический редуктор 8 и тахогенератор 10 связан с валом двигателя 6 главного привода стана.
10 Дискриминатор 21 (фиг. 3) выполнен в виде схемы последовательно соединенных элементов: дифференцирующего усилителя 53, один из входов которого через диод 54 соединен с выходом
J5 фильтра 20 высокочастотной составляющей динамических усилий в шатунах, а другой вход соединен через диод 55, противоположно направленный первому диоду, и инвертирующий усилитель 56
2Q с входным резистором.57 также с выходом фильтра 20. При этом дифференцирующий усилитель 53 выполнен в ви де усилителя 58 с интегрирующим усилителем 59 и с входным резистором 60
25 в цепи обратной связи усилителя 58. Выход интегрирующего усилителя 59 соединен с входным резистором 61 усилители 58, диод 54 соединен с входным резистором 62, а инвертирующий усилитель 56 соединен с входным резистором 63 усилителя 58. Выход дифференцирующего усилителя.соедЛ- нен через диод 64 с входом яодущего мультивибратора 65, выход ждущего мультивибратора 65 соединен с вхо35 дом опорного напряжения фазового дискриминатора 66, на другой вход которого подсоединен выход фильтра 20 высокочастотной составляющей динамических .усилий в шатунах (фиг. l).
Датчик 19 усилий в шатунах (фиг.4) выполнен в виде схемы усилителя 67, один из входных резисторов 68 которого соединен .с выходом дифференцирующего звена 69, входной резистор 70
5 которого в свою очередь соединён с выходом датчика 10 (фиг. 1) угловой скорости двигателя, а входной резистор 71 соединен с выходом датчика 24 тока (фиг. 1) якоря двига50 теля.
При этом дифференцирующее звено 69 выполнено в виде усилителя 72 с ий- тегратором 73 в цепи обратной свя-. зи. Выход интегратора 73 соедин ен . 55 с входным резистором 7 усилителя 72. Фильтр 20 высокочастотной составляющей динамических усилий в шатунах представляет собой избирательный
30
усилитель 75 (фиг. 4) с частотно-зависимой обратной связью. При этом входная цепь содержит последова- тельио соединенные конденсатор 76 и резистор 77, а в цепи обратной связи - конденсатор 78 и резистор 7
Устройство работает следующим образом.
В .процессе работы главного привода стана на вход элемента 2 срав- нения поступает сигнал, определяющий -JIOC то явную составляющую заданной, величины скорости двигателя, а с выхода блока 1 управления на вход элемента 2 сравнения - сигнал формирующий переменную составляющую заданной величины скорости двигателя главного привода, которая на участке вращения вала кривошипа О - 90 имеет отрицательную величину.
Прохождение указанных сигналов по цепи звеньев 3 и 4 устройства управления двигателем 6 вызывает такое изменение скорости двигателя прй котором имеет место синхронизация движения концов щатунов и згмень щение амплитуды высокочастотной составляющей динамических усилий в шатунах.
Если при этом происходит умень- щение амплитуды высокочастотной составляющей динамических усилий в шатунах, но не до минимального значения, то на выходе фильтра 20 (фиг. 1) появляется указанная высокочастотная составляющая, которая вызывает на выходе дискриминатора знака фазы импульсного сигнала появление импульсного сигнала с положительным значением. Дальнейшая работа логического блока приводит к увеличению коэффициента усиления адаптивного усилителя блока 1 программного управления, что в конечном итоге обеспечивает минимизацию амплитуды высокочастотной составляющей динамических усилий в шатунах главного привода стана холодной прокатки труб.
В приведенном случае дискриминатор знака фазы импульсного сигнала работает следующим образом.
205953 6
Импульсный сигнал высокочастотной составляющей динамических усилий в шатзгаах, поступивший с выхода фильт- ра 20 (фиг. 1)} на вход дискриминато- J ра 21, имеет амплитуду положительного знака первой полуволны затухающей синусоиды.
Указанный сигнал поступает на вход фазового дискриминатора 66, и
to одновременно через диод 54 - на вход дифференцирующего усилителя 53 (фиг. 3.) С выхода последнего сигнал поступает через диЬд 64 на вход ждущего мультивибратора 65, который на выходе
ts формирует затухающий импульсный высокочастотный сигнал, находящийся в фазе с импульсным сигналом, поступившим с выхода фильтра, что приводит к появлению на выходе фазового
20 дискриминатора 66 затухающего импульсного сигнала с полозкительным знаком. При изменении знака фазы импульсного сигнала, поступающего с BJЛcoдa фильтра 20 (фиг. l) , зкак затухающего
25 импульсного.1 сигнала, появляющегося на выходе фазового дискриминатора 66, также изменяется. С выхода фазового дискриминатора 66 затухающий импульсный сигнал с положительным знаком
30 поступает через инвертор 48 ((фиг. 2}) на вход логического элемента И 45 совпадения, на другой вход которого поступает сигнал с выхода индикатора направления движения клети, что приво- , дит к срабатыванию логического элемента и появлению на его выходе сигнала, который проходит через ключ 47 на входной резистор 42 резисторного оптрона 39. Излучатель фоторезисто- дд ра возбуждается и уменьшает сопротивление фоторезистор а, что приводит к увеличению коэффициента усиления усилителя 31 блока 1 управления и
в конечном итЬге обеспечивает минимизацию амплитуды высокочастотной
составляющей динамических усилий в шатунах.
Предлагаемая система автоматического управления двигателем главного привода стана холодной прокатки труб 50 по сравнению с известными позволяет повысить надежность и производительность стана за счет увеличения числа двойных ходов.
45
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления приводами механизмов стана холодной прокатки труб | 1984 |
|
SU1210930A1 |
| Система управления приводом вращения пода кольцевой печи | 1979 |
|
SU1337882A1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| Устройство для управления аккумулятором стальной полосы | 1971 |
|
SU437053A1 |
| Устройство для управления положением гидравлических нажимных механизмов | 1980 |
|
SU882673A1 |
| Гидравлическое нажимное устройство многовалковой рабочей клети поперечной прокатки | 1974 |
|
SU516440A2 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Следящая система | 1978 |
|
SU781759A1 |
| Сельсинно-следящая система регулятора пространственного положения ножей летучих ножниц | 1971 |
|
SU441118A1 |

Редактор Е.Папп
Составитель А.Сергеев Техред О ..Ващишина
8594/9
Тираж 518 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ШШ Патент, г. Ужгород, ул.Проектная,4
Корректор, А.Тяско
Подписное
| Гриншпун М.И | |||
| и Соколовский В.И | |||
| Станы холодной прокатки труб.-М.: Машиностроение, 1967, с.157 | |||
| Кацнельсон М.Е | |||
| Электрооборудование и автоматизация трубопрокатньк заводов,-М.: Металлургиздат, 1961, с.307 | |||
| Устройство для автоматического управления электроприводом | 1972 |
|
SU480052A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
