1
Изобретение относится к конвейеростроению.
Известны вибрационные конвейеры, содержащие грузонесущий орган, соединенный с опорной рамой упругими связями, приводимый в колебательное движение с помощью размещенного на приводном валу толкающего упругогчэ элемента в виде втулки со сквозными отверстиями, проходящими через ее торцовые поверхности и создающими зо- ны минимальной радиальной жесткости.
В известных вибрационных конвейерах упругий элемент в виде резинометаллшческой втулки расположен эксцентрично относительно приводного вала. Вследствие этого в начальный период вращения приводного вала приходится деформировать основные упругие связи 1со1шейера на полную величину эксцентриситета упругой втулки или его часть. При этом в приводе развиваются
такие первоначальные усилия, которые создают определенные трудности для пуска конвейера.
С целью создания наилучших условий пуска конвейера путем использования параметрического возбуждения колебаний втулк выполнена концентричной, а плоскость сим- метрии отверстий, создающих зоны минимальной радиальной жесткости, расположена перпендикулярно к плоскости симметрии зоны максимальной радиальной жесткости.
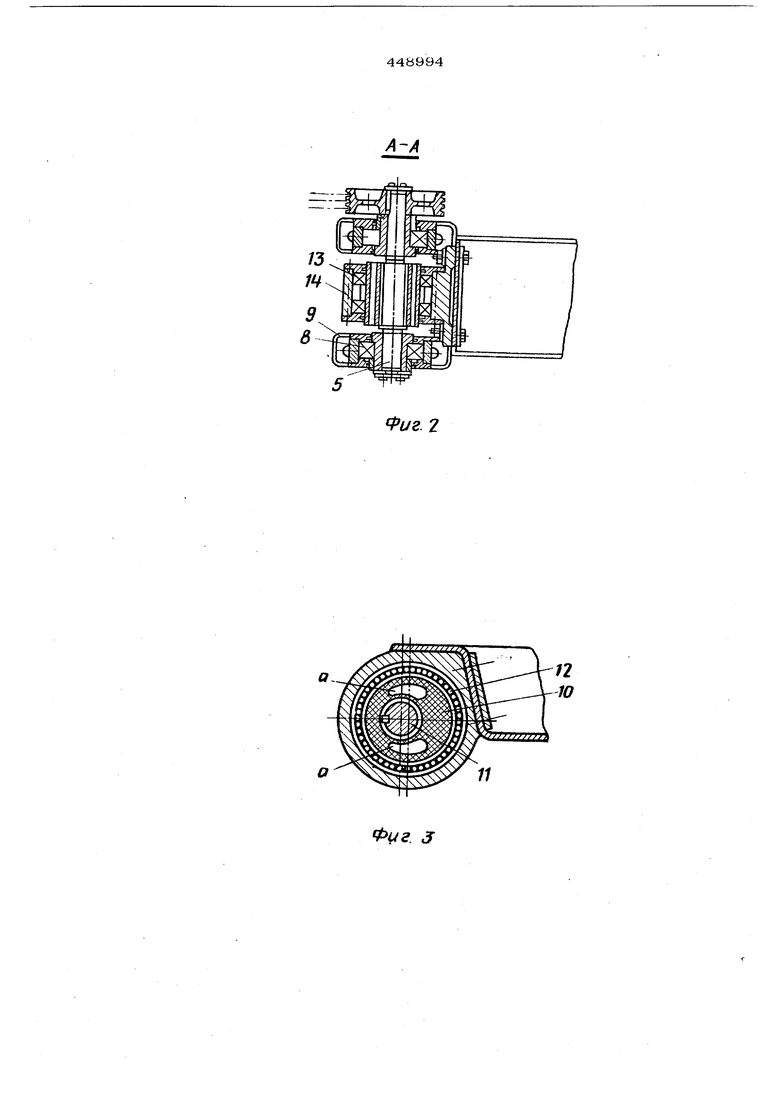
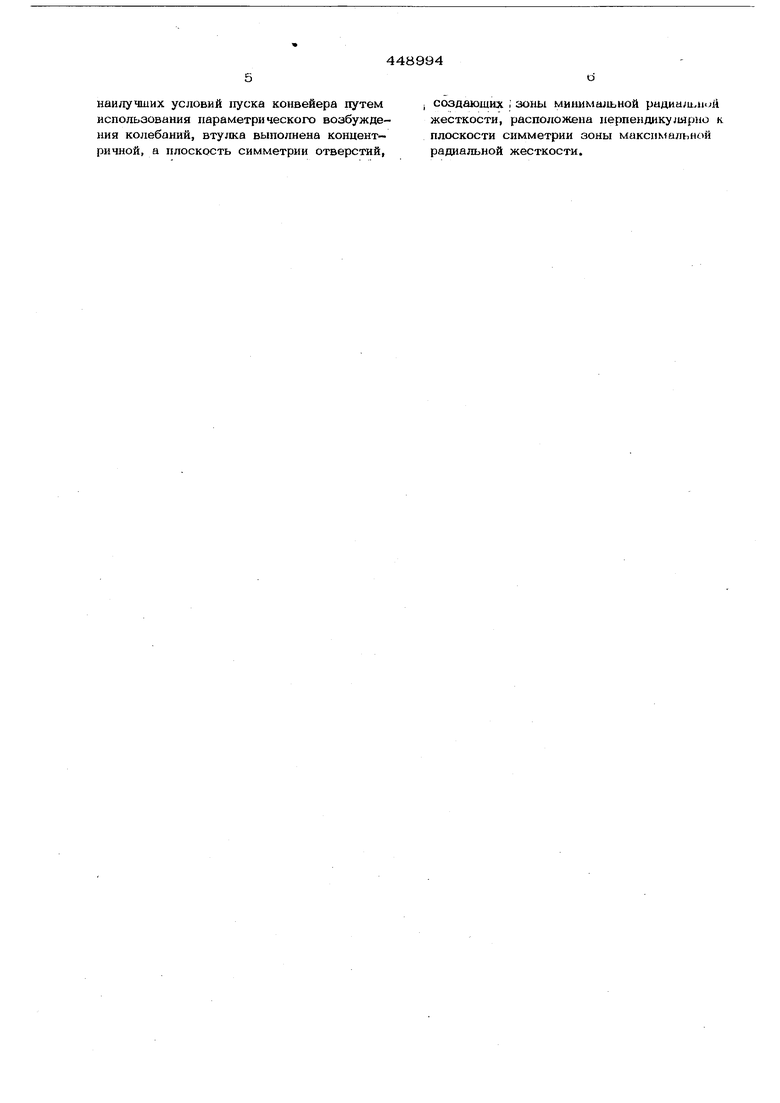
На фиг, 1 изображен .предлагаемый вибрационный конвейер; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - резинометаллическая втулка; на фиг. 4 - график кривых перемещения грузонесущих органа (верхняя кривая) и изменения жесткости втулки (нижняя кривая) при совпадении угловой скорости вращения вала со средней частотой колебаний грузонесущего органа.
Вибрационный конвейер содержит грузо- несущий орган 1, соединенный с опорной рамой 2 посредством упругих связей 3, например рессор.
Грузонесущий орган приводится в колебательное движение с помощью толкающего упругого элемента в виде резинометаллической втулки 4. Последняя размещена на приводном валу 5, связанном / клиноременной передачей 6 с двигателем 7. Приводиой вал опирается на подщишшки 8, размешенные в корпусах 9. Резино-металлическая втулка 4 включает в себя резиновую втулку 10, к вну1 ренвей поверхности которой Ефивулканизирована металлическая втулка И, а по наружной поверхности - три металлические сегмента 12.. Втулка 10 вьшолнена со сквозными отверстиями а, соэдзюишми зо- : ны минимальной радиальной жесткости. I Плоскость симметрии этих отверстий рас- положена перпендикулярно к плоскости симметрии зоны максимальной радаальной жес кости втулки. Втулка 11 жестко соединена с приводным валом 5. На наружную поверхность резино-металлической втулки насаживается подшипник 13 качения, который устанавли.вается в корпусе 14, соединенном с грузонесущим органом 1, Вместо корпуса 14, который непосредственно соединен с грузонесущим органом, может быть также использован шатун, В этом случае прдводной вал с резинометаллической втулкой размещается в головке шатуна. Втулка 4 расположена кондентрично относительно вада. /благодаря наличию ртверстий а втулка 4 . обладает тремя основными направлениями жесткости:. минимальной, направленной .по общей оси симметрией обоих отверстий, максимальной, направленной по оси, перпендикулярной к направлению оси минимальной жесткости, и средней, направление которой составляет 45 с направлениями минималь ной и максимальной жесткости. ; Виброконвейер работает следующим образом. В J. четверть цикла ,грузонесущий орган , 1 получает крайне малое возмущение X равное статическому эксцентриситету X . При достижении равенства угловой ст скорости вала 5 и средней частоты колебаний грузонесущего органа 1 в момент совпадения максимальной радиальной жесткости втулки 4 с направлением действия реакций (восстанавливающих сил), восстанавливающее усилие упругой втулки имеет одинаковое направление с перемещением грузонесущего органа, а именно справа налево. Такое положение соответствует первой четверти цикла колебаний грузонесу I щего органа. j При дальнейшем движении вала (Д чет верть цикла) в момент совпадения минимальной радиальной жесткости втулки с направлением действия реакции, восстанавливающее усилие упругой втулки имееа направление, противоположное направлению перемещения грузонесущего органа, а именно слева направо. Такое nonokeHHe соответствует второй четее ти цикла колебаний грузонесущего органа. При этом в первой четверти цикла кол&баний грузонесущего. органа восстанавлива- : ющая сила равная Р (С+дС) X соверщает положительную работу, так как она направлена в CTOpoi перемещения грузонесущего органа;,; и, наоборот, во второй четверти цикла восстанавливающая сила, равная Р () X соверщает отрицательную работу, так как она направлена в сторону, противоположную перемещению I грузонесущего органа. При дальнейщем вращении вала (Ш и 1У четверти цикла), в момент совпадения на- j правления максимальной или минимальной жесткости втулки с направлением действия i сил реакции, происходит аналогичный процесс. Следовательно, в данном случае при периодическом изменении значения радиальной жесткости упругого элемента - резино-ме таллической втулки, грузонесущий орган соверверщает параметрические колебания. Из-за отсутртвдя .конструктивно заданного эксцентриситета упругого элемента первоначальное вращение приводного вала происходит при практически невозмущенном грузон сущем органе. При этом основные упругие связи не деформируются, и привод виброконвейера не испытывает их воздействия. . Выщеизложенное техническое решение обеспечивает наилучшие условия пуска виброконвейера, при которыхприводной вал практически не испытывает реакц11и деформации основных упругих систем и легко проворачивается, набирая номинальные оборотььПредмет изобретения Вибрационный конвейер, содержащий грузонесущий орган, соединенный с опорной рамой упругими связями, приводимый в колебательное движение с помощью размещенного на приводном валу толкающего упруго- IX) элемента в виде втулки со сквозными отверстиями, проходящими через ее торцовые поверхности и создающими зоны минимальной радиальной жесткости, о т л и ч а.. ю щ и и с я тем, что, с целью создания
5С)
наилучших условий пуска конвейера путем-, создающих ; зоны миш1мшцзной радиальной использования нараметрического возбужде-жесткости, расположена перпендикулярно к
ния колебаний, втулка выполнена концент-плоскости симметрии зоны макспк5альной
ричной, а плоскость симметрии отверстий,радиальной жесткости.
448994
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ КОНВЕЙЕРр-,~- ,-Г^Г\• •'^с.Щ A<JО '^ ..-X.,' t^ , \~' OV^ ^^*4П;. K.iu ЬО- i LXasSt^^Sraf БИБЛИОТЕКА | 1973 |
|
SU361944A1 |
| Вибрационный конвейер | 1981 |
|
SU967911A1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1967 |
|
SU195365A1 |
| Вибрационный конвейер | 1979 |
|
SU882867A1 |
| йиьСОЮЗмА ЯicfJIMf! л ?VEI4'.?rr-W.'? 1Ы\ I «SM t bAsIf! iXvJsfLj^NrSflHOTr'iA | 1973 |
|
SU388973A1 |
| Виброконвейер | 1990 |
|
SU1778049A1 |
| СПОСОБ НАСТРОЙКИ ВИБРАЦИОННЫХ КОНВЕЙЕРОВ | 1973 |
|
SU404723A1 |
| ВИБРАЦИОННЫЙ ОДНОМАССНЫЙ КОНВЕЙЕР | 1967 |
|
SU222930A1 |
| Вибрационный конвейер | 1972 |
|
SU498227A1 |
| Вибрационный конвейер | 1976 |
|
SU697374A2 |